Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Кинематическая группа
|
|
Каждое исполнительное движение в станках осуществляется кинематической группой, представляющей собой совокупность источника движения, исполнительного органа, кинематических связей и органов настроек, обеспечивающих требуемые параметры движения. Название кинематической группы аналогично названию создаваемого ею исполнительного движения. Например, группу, создающую формообразующее движение, называют формообразующей группой и т.п. Структура кинематической группы может быть разнообразной и зависит от характера осуществляемого движения, числа исполнительных органов, потребности регулирования параметров движения.
Под исполнительными органами понимают подвижные конечные звенья кинематической группы, непосредственно участвующие в образовании траектории исполнительного движения. Исполнительные органы, осуществляющие абсолютное или относительное движение заготовки или режущего инструмента в процессе формообразования, называют рабочими. Например, рабочими органами являются такие звенья станка, как стол, шпиндель, суппорт, ползун и т.п.
В большинстве случаев исполнительные органы совершают вращательное или прямолинейное движение, т.е. являются подвижными звеньями вращательной или поступательной исполнительной кинематической пары.

а) вращательная б) поступательная
В зависимости от числа исполнительных органов кинематические группы делятся на простые и сложные. Простые группы имеют один исполнительный орган, а сложные – два и более исполнительных органов. Любая кинематическая группа включает в себя два качественно различных вида кинематической связи – внутреннюю и внешнюю.
Кинематическая связь в станках – это связь между звеньями или исполнительными органами станка, которая накладывает условия ограничения, не позволяющие занимать произвольные положения в пространстве относительно друг друга и иметь произвольные скорости.
Под внутренней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих качественную характеристику движения, т.е. его траекторию.
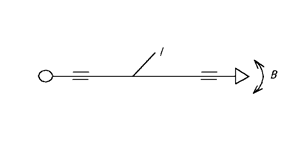
Внутренняя кинематическая связь группы в станках реализуется разными путями в зависимости от характера исполнительного движения, числа исполнительных органов в группе, требуемой точности образуемой производящей линии (траектории движения) и других факторов. Например, в простых кинематических группах она осуществляется соединением двух соприкасающихся звеньев исполнительной группы, одним из которых является сам исполнительный орган 1 группы, т.е. шпиндель, стол и т. д. [рис. а) и б)].
 В сложных кинематических группах с двумя и более исполнительными органами внутренняя кинематическая связь реализуется в виде кинематической цепи (цепей) связывающей под-вижные исполнительные органы группы и обеспечивающей строгую
В сложных кинематических группах с двумя и более исполнительными органами внутренняя кинематическая связь реализуется в виде кинематической цепи (цепей) связывающей под-вижные исполнительные органы группы и обеспечивающей строгую
функциональную согласованность их перемещений или скоростей.
в)
Эти цепи называют внутренними или функциональными. Причем кинематическое соединение исполнительных органов сложной группы может быть как механическим, т.е. цепью механических передач, так и не механическим, например, в виде электрической цепи, как в станках с ЧПУ. Например, рис. в), группа, обеспечивающая сложное движение (В1В2) и имеющая два исполнительных органа I и II, содержит в своей структуре, как минимум, одну внутреннюю кинематическую цепь 1-4-2 между исполнительными органами.
 Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные
Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные
г)
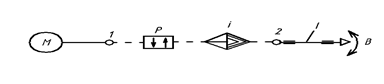
характеристики движения, т.е. его скорость, направление, путь и исходную точку. Обычно внешняя кинематическая связь сложной группы реализуется в виде кинематической цепи 3-4 между источником движения М и одним из звеньев внутренней связи группы (рис. в). Для простой кинематической группы внешняя кинематическая связь есть цепь 1-2 между источником движения М и исполнительным органом группы I (рис. г). Внешняя кинематическая связь предназначена для передачи энергии от источника движения М во внутреннюю связь группы.
На рис. д) показана структурная схема кинематической группы, обеспечивающей исполнительное движение (В1В2П3) и имеющей три исполнительных органа. Для обеспечения функциональной согласованности перемещений или скоростей исполнительных органов I, II, III достаточно двух функциональных кинематических цепей, например, 1-5-2 и 2-5-3 или другого их сочетания. Внешняя кинематическая связь группы реализуется кинематической цепью 4-5.
Для изменения и регулирования параметров движения в станках используют специальные устройства, которые в общем случае называются органами настройки. Органы настройки таких параметров движения, как траектория, скорость и иногда путь, на структурных схемах обозначают знаком  с буквой i, а органы настройки направления движения – знаком
с буквой i, а органы настройки направления движения – знаком  .
.
Заштрихованная часть знака  указывает на фактическое направление передачи движения через орган настройки. Органы настройки, регулирующие количественные характеристики движения, т.е. изменяющие скорость, направление, путь и исходную точку, всегда располагают во внешней связи кинематической группы (в цепи между источником движения и внутренней кинематической связью группы). Органы настройки, регулирующие качественную характеристику движения, т.е. его траекторию, располагают только во внутренней кинематической связи группы.
указывает на фактическое направление передачи движения через орган настройки. Органы настройки, регулирующие количественные характеристики движения, т.е. изменяющие скорость, направление, путь и исходную точку, всегда располагают во внешней связи кинематической группы (в цепи между источником движения и внутренней кинематической связью группы). Органы настройки, регулирующие качественную характеристику движения, т.е. его траекторию, располагают только во внутренней кинематической связи группы.

д)
Date: 2016-07-25; view: 378; Нарушение авторских прав