Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Запустить основной скрипт программы командой
|
|
Назначение и технические характеристики робота
Описание исполнительных устройств и датчиков
Описание примеров применения
Результаты моделирования
Заключение
Список литературы
Темы отчетов:
1. Анализ аппаратного обеспечения манипулятора Kuka iiwa (кинематика робота + размеры звеньев + характеристики + преимущества + недостатки).
2. Применение силомоментных датчиков в робототехнических системах.
3. Анализ аппаратного обеспечения манипуляционного робота SCHUNK.
4. Современные тактильные датчики. Их разновидности.
5. Применение матричных тактильных датчиков в производстве и в робототехнических системах.
6. Применение визуального очувствления в современном производстве и робототехнических системах.
7. Современные робототехнические конструкторы – возможности, преимущества и недостатки.
- Анализ аппаратного обеспечения мобильного робота KUKA youBot;
- Анализ аппаратного обеспечения манипуляционного робота KUKA LBR IIWA;
- Анализ аппаратного обеспечения манипуляционного робота SCHUNK;
- Анализ аппаратного обеспечения манипуляционного робота ABB IRB 360;
- Анализ аппаратного обеспечения манипуляционного робота ABB IRB 140;
- Анализ аппаратного обеспечения манипуляционного робота UR10;
- Анализ аппаратного обеспечения манипуляционного робота PhantomX;
- Анализ аппаратного обеспечения промышленного робота Baxter;
- Анализ аппаратного обеспечения реконфигурируемого робота MTRAN III;
- Анализ аппаратного обеспечения мобильного робота BigDog;
- Анализ аппаратного обеспечения антропоморфного робота Asimo;
- Анализ аппаратного обеспечения антропоморфного робота iCub;
- Анализ аппаратного обеспечения антропоморфного робота NAO;
- Анализ аппаратного обеспечения зооморфного робота Robbie;
- Анализ аппаратного обеспечения транспортного робота Google Car;
- Анализ аппаратного обеспечения робота специального назначения Варан;
- Анализ аппаратного обеспечения робота специального назначения РТК-05;
- Анализ аппаратного обеспечения робота специального назначения Ель-4;
- Анализ аппаратного обеспечения хирургического робота Da Vinci;
- Анализ аппаратного обеспечения телеуправляемого подводного аппарата ГНОМ;
- Анализ аппаратного обеспечения робота для подводных исследований ACM-R5;
- Анализ аппаратного обеспечения мобильного робота Ant Hexapod;
- Анализ аппаратного обеспечения мобильного робота Roller-Walker;
- Анализ аппаратного обеспечения мобильного робота SUMMIT -X;
- Анализ аппаратного обеспечения робота-трансформера MorpHex;
- Анализ аппаратного обеспечения мобильного робота-марсохода Curiosity;
- Анализ аппаратного обеспечения робота телеприсутствия R.Bot;
- Анализ аппаратного обеспечения мобильного робота в составе многоагентной системы «Centibots»;
- Анализ аппаратного обеспечения мобильного робота в составе многоагентной системы «Термиты»;
- Анализ аппаратного обеспечения летающего робота в составе многоагентной системы «Flying Machine Enabled Construction»;
Тема практического занятия
Моделирование робота в среде V-REP на базе операционной системы Linux (Ubuntu).
Время выполнения: 2 часа.
Цели практического занятия
1. Освоение навыков виртуализации операционных систем
2. Освоение навыков работы с ОС Linux (Ubuntu);
3. Знакомство с программным комплексом для моделирования роботов V-REP
Требуемые файлы

Введение
Роботы KUKA youBot (рис. 0), входящие в состав лаборатории «Интеллектуальные автономные и мультиагентные робототехнические системы», работают под управлением ОС Ubuntu (32-bit). Разработку программ для данных роботов и их моделирование целесообразно также проводить на данной операционной системе. В рамках операционной системы Windows это можно сделать при помощи виртуальной машины.

Рис. 0. Робот KUKA youBot
1. Установка Oracle VM Virtualbox
Для запуска операционой системы Ubuntu в ОС Windows можно воспользоваться программой Oracle VM Virtualbox. Актуальную версию VirtualBox можно скачать на странице загрузки проекта:
http://white55.ru/vboxubuntu.html
например: VirtualBox-5.0.22-108108-Win.exe.
Установка VirtualBox проходит в диалоговом режиме (рис. 00) и не занимает много времени.

Рис. 00. Установка VirtualBox
При первом запуске VirtualBox отображается основное окно программы с приветствием и активированной кнопкой «Создать» для создания новой виртуальной машины (ВМ). Окно создания ВМ представлено на рис. 1.

Рис. 1. Окно создания виртуальной машины
Используйте параметры: Ubuntu (32-bit), 1024 МБ ОЗУ, динамический диск размером 8 ГБ, формат файла VDI.
При первом запуске системы укажите файл с образом Ubuntu: ubuntu-12.04.5-desktop-i386.iso
Получить его можно у преподавателя или по адресу: http://releases.ubuntu.com/12.04/
2. Установка и настройка Ubuntu
В виртуальной версии Ubuntu выберите английский язык и нажмите «Install Ubuntu» (рис. 2).

Рис. 2. Экран ОС Ubutu, загруженной в VirtualBox
Не отмечайте галочки по поводу установки обновлений. А на следующем этапе согласитесь с опцией «Erase disk and install Ubuntu» (речь идет о виртуальном диске, рис. 3).

Рис. 3. Установка Ubuntu на виртуальный жесткий диск
На экране установки «Keyboard layout» выберите раскладку клавиатуры «Russian-Russian». Далее заполните информацию о пользователе (рис. 4) и дождитесь окончания установки (рис. 5).

Рис. 4. Заполнение информации о пользователе

Рис. 5. Сообщение об успешном завершении установки ОС Ubuntu
После установки Ubuntu размер окна ОС может быть недостаточно большим. Для его увеличения необходимо дополнительно установить графические библиотеки. После выполнения соответствующих действий, указанных на рис. 6, необходимо перезагрузить виртуальную ОС Ubutnu.
Также может потребоваться разрешить перенос файлов между основной и виртуальной операционными системами. Для этого можно (а) настроить общую папку (б) разрешить функцию Drag and Drop или же (в) подключить USB-носитель информации. Последний способ наиболее надежный (рис. 7).
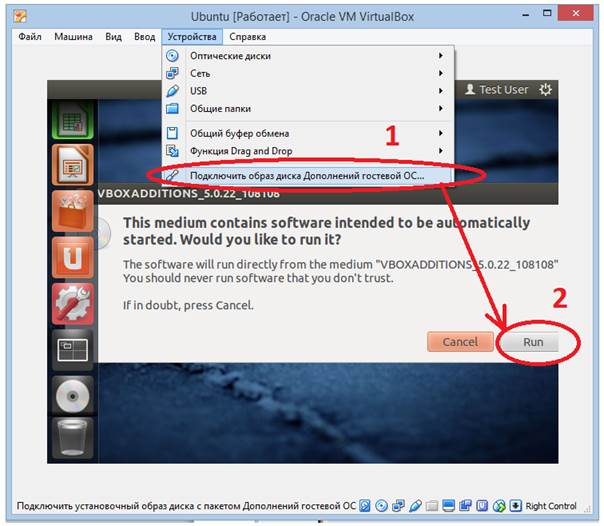
Рис. 6. Увеличение размера экран виртуальной Ubuntu

Рис. 7. Подключение флешки для переноса файлов
3. Установка и работа с V-REP
Моделирующий комплекс V-REP предназначен для исследования различных мехатронных и робототехнических систем, и, в частности, систем управления и обработки информации в подобных устройствах.
Скачать данный комплекс можно по ссылке: http://www.coppeliarobotics.com/downloads.html
Пример файла: V-REP_PRO_EDU_V3_3_1_Linux.tar.gz
Установка и запуск данной программы в ОС Ubuntu заключается в следующем:
1)распаковать скачанный архив в папку «vrep» на рабочем столе Ubuntu
2)Запустить терминал Ubuntu (сочетание клавиш Ctrl+Alt+T)
3)Перейти в папку vrep командой:
cd /home/test/Desktop/vrep
где test – это имя пользователя ОС
Запустить основной скрипт программы командой
./vrep.sh
Внешний вид терминала и вводимых команд представлен на рис. 8.

Рис. 8. Команды на запуск V-REP
Внешний вид главного окна программы VREP представлен на рис. 9.

Рис. 9. Программа V-REP, запущенная в ОС Ubuntu
В разделе «Model browser» главного окна выберите раздел Models/robots/mobile и перетащите в область отображения графики мобильного робота KUKA youBot.
Запустите симуляцию сцены, нажав на кнопку с треугольным значком. Откроется окно с пультом управления роботом KUKA youBot (рис. 10).
Исследуйте возможности по управлению подвижной платформой, а также манипуляционным устройством робота на примере захвата кубика, расположенного на борту робота.

Рис. 10. Управление виртуальной моделью робота KUKA youBot в ручном режиме
| <== предыдущая | | | следующая ==> |
| Б. Основные принципы обеспечения безопасности | | | ІV. Інформаційно-пропагандистське забезпечення. |
Date: 2016-07-18; view: 1580; Нарушение авторских прав