Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Опишите 3 причины, вызывающие систематические ошибки в одометрии. Опишите их. Приведите примеры этих трех причин
|
|
Позиция робота представляется вектором

Для дифференциального приводного робота положение может быть оценено исходя из известного положения путем интеграции движения (суммированием приращения расстояния пути). Для дискретной системы с фиксированным интервалом Dt дискретизации дополнительные расстояния (Dx; Dy; Dq) поездки находятся

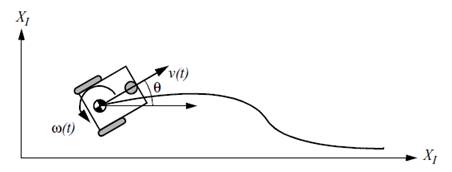
Рисунок 5.3
Движение дифференциального приводного робота

где (Dx; Dy; Dq) = путь, пройденный в последнем интервале выборки;
Dsr; Dsl = расстояние перемещения для правого и левого колеса соответственно;
b = расстояние между двумя колесами дифференциального приводного робота.
Таким образом, мы получаем обновленную позицию р¢:

Используя соотношение для (Ds; Dq) уравнений (5.4) и (5.5), мы получим дополнительно основное уравнение для обновления позиции одометрии (для дифференциально приводных роботов):

Как мы уже обсуждали ранее, обновление положения одометрии может дать только очень грубую оценку фактического положения. Благодаря интеграции ошибок неопределенности р и ошибки движения во время дополнительных движений (Dsr; Dsl) ошибка позиция на основе интеграции одометрии растет со временем.
На следующем этапе мы создадим модель ошибки для интегрированного положения р¢, чтобы получить ковариационную матрицу  оценки позиции одометрии. Чтобы сделать это, мы предполагаем, что в отправной точке начальная матрица ковариаций
оценки позиции одометрии. Чтобы сделать это, мы предполагаем, что в отправной точке начальная матрица ковариаций  известна. Для приращения движения (Dsr; Dsl) мы предполагаем, что следующую ковариационную матрицу
известна. Для приращения движения (Dsr; Dsl) мы предполагаем, что следующую ковариационную матрицу  .
.

где Dsr и Dsl, являются расстояниями пройденными каждым колесом, а постоянные kr, kl являются константами ошибок представляющие недетерминированные параметры привода двигателя и колесо-пол взаимодействия. Как вы можете видеть, в уравнении (5.8) мы сделали следующие предположения:
• Две ошибки индивидуально приводимых колес являются независимыми5;
• Дисперсия ошибки (левое и правое колеса) пропорциональна абсолютному значению из расстояния перемещения.
Эти предположения, хотя и не идеальны, но подходят и, таким образом, будут использованы для дальнейшей разработки модели ошибок. Ошибки движения обусловлены неточным движением, из-за деформации колеса, проскальзывания, неровного пола, ошибки в энкодерах и так далее. Значения постоянных ошибок kr и kl и зависят от робота и окружающей среды и должны быть экспериментально установлены, выполняя и анализируя репрезентативные движения. Если мы предположим, что р и Dr1=(Dsr; Dsl) не коррелируют и вывод уравнения f разумно приблизить разложением Тейлора (линеаризацией) первого порядка, мы заключаем, используя закон распространения ошибок

Ковариационная матрица Sр является, конечно, всегда дается через Sр¢ на предыдущем шаге и может быть вычислена после указания начального значения (например, 0).
С помощью уравнения (5.7), мы можем разработать два якобиана Fp=Ñpf и FDrl=ÑÑrlf

Детали для прибывания в уравнение (5.11) являются

и при


Рисунок 5.4
Рост неопределенности позиции для прямолинейного движения: Обратите внимание, что неопределенность в у растет гораздо быстрее, чем в направлении движения. Это связано с интеграцией неуверенности в ориентации робота. Эллипсы нарисованные вокруг позиций робота представляют неопределенности в х, у направлении (например 3s). Неопределенность ориентации q не представлена в картине, хотя его эффект может косвенно наблюдаться.

мы получим уравнение (5.11).
Рисунки 5.4 и 5.5 показывают типичные примеры того, как ошибки позиции растут со временем. Результаты были рассчитаны с использованием модели ошибок, приведенными выше.
После того как модель ошибки была установлена, параметры ошибок должны быть указаны. Можно компенсировать детерминированные ошибки правильно калибруя робот. Однако параметры ошибок, определяющие недетерминированные ошибки могут быть только количественно определены статистический (повторяющимся) измерением.

Рисунок 5.5
Рост неопределенности позиции для кругового движения (r = сonst): Опять же, неопределенность перпендикулярно к движению растет гораздо быстрее, чем в направлении движения. Отметим, что основные оси эллипса неопределенности не остаются перпендикулярными к направлению движения.
| <== предыдущая | | | следующая ==> |
| Помощи личного местоимения. Напишите номер этого предложения | | |
Date: 2016-05-25; view: 492; Нарушение авторских прав