Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Структурні схеми автоматичних засобів вимірювання
|
|

 УЗАГАЛЬНЕНІ СТРУКТУРНІ СХЕМИ АВТОМАТИЧНИХ ЗАСОБІВ ВИМІРЮВАННЯ
УЗАГАЛЬНЕНІ СТРУКТУРНІ СХЕМИ АВТОМАТИЧНИХ ЗАСОБІВ ВИМІРЮВАННЯ
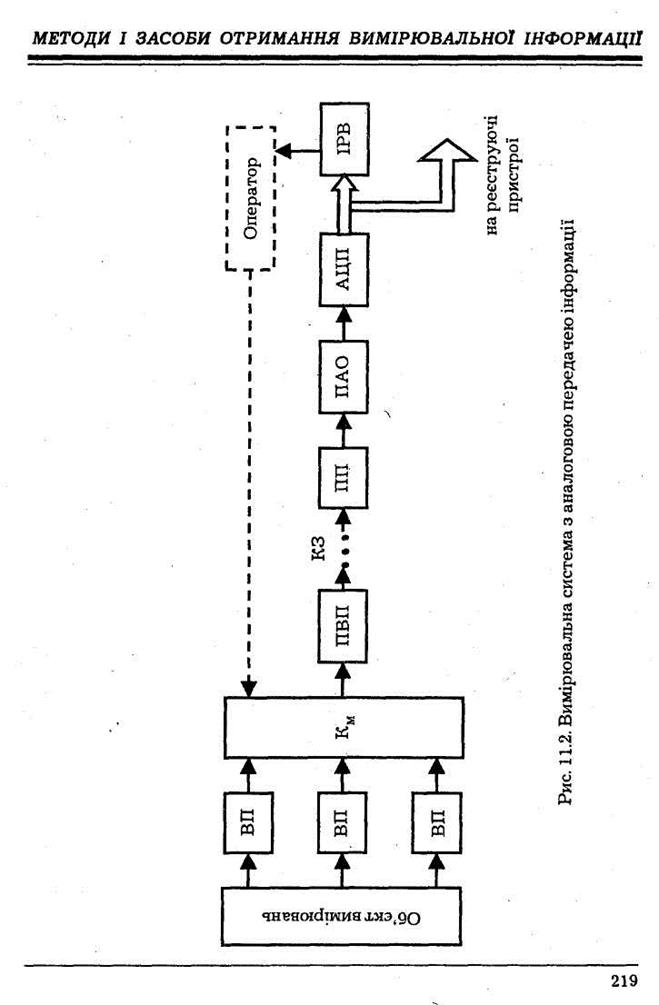
Розглянемо основні принципи побудови автоматичних засобів вимірювання. Для простих систем, які призначені для вимірювання невеликої кількості величин з відносно невисокою швидкодією, характерна структурна схема, наведена на рис. 11.2.
 Інформація про значення фізичних величин об'єкту сприймається вимірювальними перетворювачами ВП. Вихідні електричні сигнали з вимірювальних перетворювачів ВП через комутатор Км почергово поступають на передавальний (вихідний) перетворювач ПВП, який узгоджує виходи вимірювальних перетворювачів з каналом зв'язку КЗ (повітряний або за допомогою провідників). На стороні прийому каналу зв'язку приймаючий перетворювач ПП виділяє інформаційний сигнал, який потім поступає на пристрій аналогової обробки сигналів ПАО, де виконується первинна обробка і підсилення вимірювального сигналу. Далі сигнал піддається аналогово-цифровому перетворенню за допомогою аналогово-цифрового перетворювача АЦП і надходить на індикатор результатів вимірювання ІРВ. Оцінку отриманої інформації і вироблення керуючих дій здійснює оператор.
Інформація про значення фізичних величин об'єкту сприймається вимірювальними перетворювачами ВП. Вихідні електричні сигнали з вимірювальних перетворювачів ВП через комутатор Км почергово поступають на передавальний (вихідний) перетворювач ПВП, який узгоджує виходи вимірювальних перетворювачів з каналом зв'язку КЗ (повітряний або за допомогою провідників). На стороні прийому каналу зв'язку приймаючий перетворювач ПП виділяє інформаційний сигнал, який потім поступає на пристрій аналогової обробки сигналів ПАО, де виконується первинна обробка і підсилення вимірювального сигналу. Далі сигнал піддається аналогово-цифровому перетворенню за допомогою аналогово-цифрового перетворювача АЦП і надходить на індикатор результатів вимірювання ІРВ. Оцінку отриманої інформації і вироблення керуючих дій здійснює оператор.
 Дана система призначена тільки для збирання і відображення вимірювальної інформації. Існує декілька модифікацій, які ' відрізняються взаємним розміщенням блоків системи. Наприк-лад, АЦП може бути розміщений на передавальній стороні системи безпосередньо за Км. У цьому випадку вихідні сигнали ВП, що уніфіковані за своїм розміром, почергово надходять на АЦП і після цифрового перетворення - у канал зв'язку. Передача по КЗ інформації у цифровій формі відрізняється більш високим захистом від перешкод, ніж при передачі аналогових сигналів. Для зменшення кількості ліній зв'язку використовується ПВП з послідовною передачею сигналу вихідного коду АЦП. На прийРисьній стороні системи відбувається приймання інформації і перетворення її у паралельний код для подальшої обробки і реєстрації. Великі можливості для організації збору вимірювальної інформації на даний час представляють АЦП, які виконані за інтегральною технологією.
Дана система призначена тільки для збирання і відображення вимірювальної інформації. Існує декілька модифікацій, які ' відрізняються взаємним розміщенням блоків системи. Наприк-лад, АЦП може бути розміщений на передавальній стороні системи безпосередньо за Км. У цьому випадку вихідні сигнали ВП, що уніфіковані за своїм розміром, почергово надходять на АЦП і після цифрового перетворення - у канал зв'язку. Передача по КЗ інформації у цифровій формі відрізняється більш високим захистом від перешкод, ніж при передачі аналогових сигналів. Для зменшення кількості ліній зв'язку використовується ПВП з послідовною передачею сигналу вихідного коду АЦП. На прийРисьній стороні системи відбувається приймання інформації і перетворення її у паралельний код для подальшої обробки і реєстрації. Великі можливості для організації збору вимірювальної інформації на даний час представляють АЦП, які виконані за інтегральною технологією.
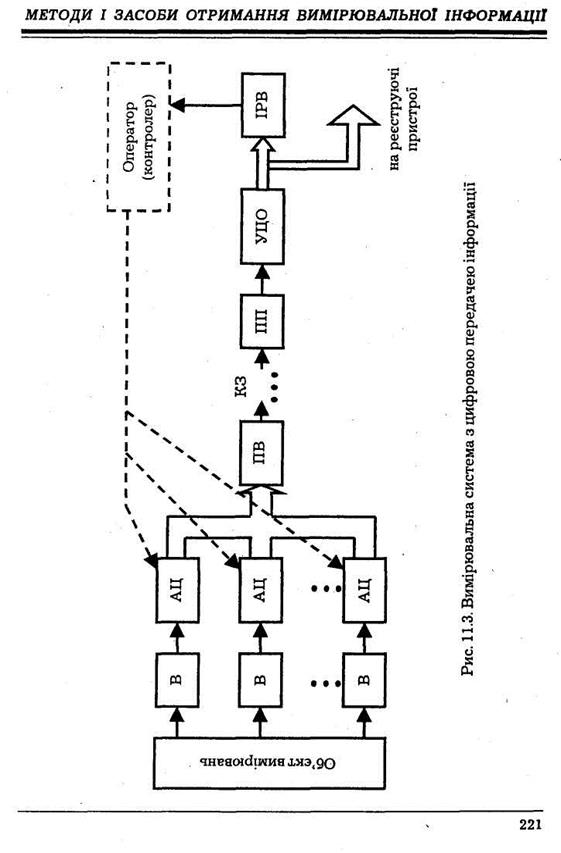
їх Рисі габаритні розміри потужність споживання дають можливість конструктивно об'єднувати АЦП з кожним ВП об'єкту і організовувати безпосередню передачу через КЗ інформації у цифровій формі. Це дає можливість відмовитись від аналогового комутатора, який вносить значні перешкоди, особливо при передачі сигналів Рисих рівнів (рис. 11.3).
На стороні, в якій приймається інформація, після виділення цифрового інформаційного сигналу здійснюється ряд операцій обробки, що характерні для простих систем збору інформації (визначення середнього значення, порівняння, визначення постійних складових, накопичення і зберігання інформації і т.д.). Ці операції виконуються пристроєм цифрової обробки (ПЦО).
Для організації керування процесом вимірювання у подібні системи вводиться логічний керуючий пристрій, який працює за "жорстким", тобто незмінним алгоритмом і отримав назву "системний контролер". У функцію контролера входить автоматичне завдання тривалості такту вимірювання кожного параметру, перемикання комутатора, керування індикацією, реєстрацією і цифровою обробкою результатів вимірювань.
На даний час з великим успіхом здійснюється заміна контролера, що працює за принципом "жорсткого" алгоритму, на контролер з програмно-керуючим принципом функціонування на основі мікропроцесорних комплектів великих інтегральних систем (ВІС). Такий мікропроцесорний контролер дає змогу
зробити більш гнучким і легко переналагоджуваним весь алгоритм роботи системи. При цьому подібні контролери у більшості випадків можуть також обробляти інформацію, що дає змогу відмовитись від блоку ПЦО (пристрою цифрової обробки). Таким чином, введення у систему вже досить простих обчислювальних засобів значно розширює можливості керування і обробку інформації.
Розглянемо загальні принципи побудови вимірювальної системи, яка має у своєму складі обчислювальну машину (ЕОМ, мікро ЕОМ). Одним з можливих варіантів побудови таких систем
є система, що має інтерфейс радіального типу (рис, 11.4). Вона складається з окремих приладів, що виміряють значення обмеженої кількості досліджуваних фізичних величин. Передача інформації від приладів до ЕОМ відбувається під керуванням спеціальної програми. Наявність у загальній системі різних приладів і пристроїв вимагає створення для кожного з них свого специфічного інтерфейсу, оскільки кожний прилад з'єднується з ЕОМ індивідуальним кабелем. Таким чином, недоліком радіальної структури спряження є те, що ЕОМ повинна мати стільки виходів, скільки до неї підключено зовнішніх пристроїв
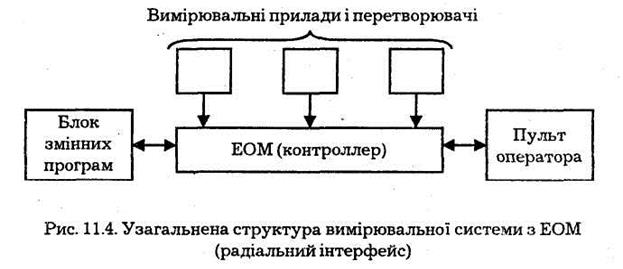
Це ускладнює процес взаємодії ЕОМ із зовнішнім пристроєм і обмежує можливості системи з точки зору перебудови і нарощування її структури.
Громіздкість структури цих систем зумовила шукати- такі принципи організації, які б забезпечили уніфіковані інтерфейсні характеристики. Це означає, що всі зовнішні по відношенню до ЕОМ прилади і пристрої повинні володіти однаковими форматами вихідних кодів і однаковими принципами організації обміну даними, що дає змогу значно спростити спряження вузлів, блоків, приладів у системі і підвищити швидкість обміну інформації.
 Магістральна структура спряження приладів і пристроїв у вимірювальній системі характеризується наявністю наскрізного каналу передачі даних (системного каналу обміну інформацією),
Магістральна структура спряження приладів і пристроїв у вимірювальній системі характеризується наявністю наскрізного каналу передачі даних (системного каналу обміну інформацією),
 рівнозначністю всіх підключених до нього пристроїв і асинхронним принципом обміну. Кожний пристрій, який підключений до каналу передачі даних, може у цьому випадку виконувати будь-яку із трьох функцій: бути передавачем інформації, приймачем або керуючим пристроєм (контролером).
рівнозначністю всіх підключених до нього пристроїв і асинхронним принципом обміну. Кожний пристрій, який підключений до каналу передачі даних, може у цьому випадку виконувати будь-яку із трьох функцій: бути передавачем інформації, приймачем або керуючим пристроєм (контролером).
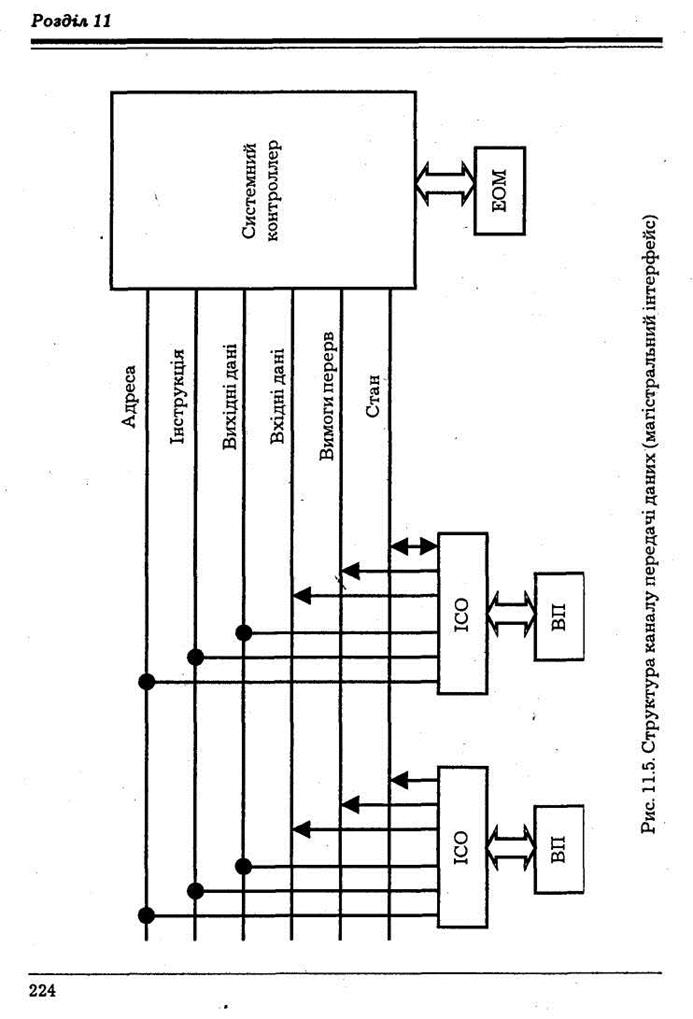
Спочатку цей принцип організації обміну з'явився в обчислювальній техніці, а потім через його великі організаційно-технічні переваги швидко поширився у приладобудуванні, де широко почали застосовувати ЕОМ для обробки вимірювальної інформації. Застосування такого каналу передачі даних дає змогу на основі обмеженої номенклатури приладів і пристроїв створювати самі найрізноманітніші системи. Основне призначення передачі каналу даних (рис. 11.5) — це впорядкування обміну інформаційними потоками між окремими елементами, що входять у систему.
У каналі відбувається розподіл інформації між окремими елементами приладу або системи, встановлюється почерговість роботи елементів, що одночасно вимагають зв'язку і т.д. У загальному випадку канал передачі даних містить наступні основні технічні засоби:
системний контролер, який координує і контролює роботу
окремих елементів системи, здійснює зміну форматів даних і
команд у процесі обміну з ЕОМ;
шинну систему провідникових ліній зв'язку, через які пере
даються інформаційні і керуючі сигнали між всіма елементами
системи;
інтерфейсні схеми обміну (ІСО), безпосередньо зв'язані з
шинною системою каналу і входять у систему вимірювальними
приладами і перетворювачами (ВП).
Магістральна структура каналу передачі даних отриРиса на даний час широке поширення у вимірювальному приладобудуванні.
Узагальнена структурна схема вимірювальної системи з мікропроцесорною обробкою інформації і керуванням наведена на рис. 11.6.
Система дає змогу здійснити збір аналогової вимірювальної інформації, її цифрове кодування, подальшу обробку і реєстрацію кінцевих результатів. Одночасно у системі здійснюється керування як всім ходом вимірювального процесу, так і функціонуванням окремих вузлів системи. До складу системи входять аналогова вимірювальна підсистема АВП, операційна підсистема ОП і підсистема вводу і виводу інформації ПВВ. Структура і функціонування АВП визначається конкретним складом вимірювальних параметрів об'єкту дослідження і їх значеннями, видом каналу зв'язку з об'єктом, вимогами до точності вимірювань і т.д За допомогою відповідних первинних вимірювальних перетворювачів ПВП вимірювані фізичні величини х. перетворюються в аналогові сигнали yf форма подання яких є зручною для обробки у системі (частіше всього використовуються параметри електричних сигналів: рівні струмів, напруг, частота, період, фаза і т.д.). Різноманітність форм подання сигналів уi та їх меж вимірювання вимагає вводу у вимірювальну підсистему проміжних перетворювачів (норРисізації і попередньої обробки сигналів), які утворюють вимірювані аналогові кола (ВК). Переважно до складу ВК входять аналогові комутатори, подільники, мости, попередні
 підсилювачі, фільтри, детектори і т.д. Уніфіковані сигнали Уi, надходять на вихідний перетворювач — АЦП
підсилювачі, фільтри, детектори і т.д. Уніфіковані сигнали Уi, надходять на вихідний перетворювач — АЦП

 Залежно від вимог, що ставляться до швидкодії, системи АЦП можуть бути під'єднані до виходу вимірювального кола, утворюючи блок АЦП, або за допомогою системного аналогового комутатора кожний із сигналів уi почергово подається на вхід системного АЦП, на виході якого з'являється його цифровий еквівалент.
Залежно від вимог, що ставляться до швидкодії, системи АЦП можуть бути під'єднані до виходу вимірювального кола, утворюючи блок АЦП, або за допомогою системного аналогового комутатора кожний із сигналів уi почергово подається на вхід системного АЦП, на виході якого з'являється його цифровий еквівалент.
Операційна підсистема призначена для цифрової обробки кодів АЦП з метою визначення кількісних значень параметрів х. об'єкту досліджень. До функцій операційної підсистеми ОП входить також формування керуючих дій для всіх основних вузлів системи. Залежно від об'єму розв'язаних завдань в ролі ОП можуть використовуватися обчислювальні машини різних класів.
Наприклад, для інформаційно-обчислювальних комплексів переважно використовуються керуючі машини і міні-ЕОМ, для інформаційно-вимірювальних систем характерним є застосуваннях мікро-ЕОМ. У системах з високою продуктивністю, а також в автоматичних засобах вимірювань мають широке застосування одноплатні мікро-ЕОМ і мікропроцесорні машини на основі мікропроцесорних комплектів ВІС (великих інтегральних схем).
На рис. 11.7 зображений один із варіантів структурної логічної організації ОП на мікропроцесорних комплектах великих інтегральних схем (Мп К ВІС). Інформаційний потік А надходить в ОП через вхідний інтерфейс ВХІ, в якому виконується норРисізація вхідних кодів за рівнем і форматом. Пристрій місцевого керування (ПМК) призначений для організації роботи ОП для виконання заданого алгоритму обробки вхідного потоку А. Крім того, ПМК керує процесом обміну інформацією між внутрішніми вузлами операційної

 підсистеми ОП. У загальному випадку ПМК виконується на основі ІС (інтегральних схем) постійного запам'ятовуючого пристрою (ПЗП), в якому зберігається програма роботи OIL
підсистеми ОП. У загальному випадку ПМК виконується на основі ІС (інтегральних схем) постійного запам'ятовуючого пристрою (ПЗП), в якому зберігається програма роботи OIL
Весь процес арифметико-логічної обробки інформації здійснюється мікропроцесором (МП). Результати обробки надходять в оперативний запам'ятовуючий пристрій (ОЗП) або через вихідний інтерфейс (ВихІ) пересилаються з ОП у зовнішні кола у вигляді інформаційного потоку В. Синхронізація роботи ОП у цілому і окремих її вузлів здійснюється сигналами синхрогенератора (СГ). МП (мікропроцесор) разом з інтерфейсними схемами і шинами обміну інформацією утворюють ядро ОП - ЦП (центральний процесор). Склад ЦП, а також конфігурація шин ОП можуть змінюватися залежно від вимог, що до них накладаються, а також залежно від архітектури мікропроцесорних комплектів (МПК ВІС).
Підсистема ПВВ, яка входить до складу вимірювальної системи, складається з ряду зовнішніх (по відношенню до ОП) пристроїв вводу-виводу інформації. Основні функції, які виконуються цією підсистемою:
— реєстрація результатів обробки на цифрових індикаторах,
екранах дисплеїв;
—документування інформації у вигляді "лістингів" на паперових носіях;
оперативний ввід програм з (перфострічок) магнітних
дисків і т.д.;
організація додатної зовнішньої пам'яті на магнітних носіях
або інтегральних системах;
ручне керування системою за допомогою пультового
терміналу;
формування керуючих і виконуючих сигналів зворотнього
зв'язку з об'єктом дослідження.

 Перелік пристроїв вводу-виводу, які входять до складу ПВВ конкретної вимірювальної системи, визначається на основі аналізу багатьох факторів: загальних технічних вимог на проектовану систему; характеристик застосованої мікро ЕОМ; способу організації каналу передачі даних; технічних засобів вводу-виводу, що є у наявності у проектувальника і т.д.
Перелік пристроїв вводу-виводу, які входять до складу ПВВ конкретної вимірювальної системи, визначається на основі аналізу багатьох факторів: загальних технічних вимог на проектовану систему; характеристик застосованої мікро ЕОМ; способу організації каналу передачі даних; технічних засобів вводу-виводу, що є у наявності у проектувальника і т.д.
Особливе значення у системі має організація зв'язку між її підсистемами. Обмін інформацією між підсистемами відбувається у цифровій формі через системний канал обміну (канал передачі даних) у результаті виконання спеціальних команд, які записані у програмі, та ініціюють для обміну два пристрої, що входять до складу або однієї підсистеми, або двох різних підсистем. Причому у каналі один пристрій завжди є передаючим, а інший — прийРисьним. Вибір конкретних пристроїв визначається на основі присвоєних їм адрес (адресна частина команди), а вид обміну визначається керуючою частиною команди. Таким чином, через системний канал обміну передаються повідомлення, які містять вимірювальну (виміряну) інформацію і результати її обробки, команди, адреси, сигнали керування і тд. Взаємодіючі між собою пристрої системи повинні розрізняти всі види повідомлень, які передаються через канал.
Інформаційна сумісність між пристроями системи забезпечується інтерфейсними схемами обміну. Від способу організації інтерфейсу у системі у значній мірі залежить ефективність її функціонування.
Date: 2016-01-20; view: 939; Нарушение авторских прав