Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Примеры звеньев
|
|
1) Идеальный конденсатор

Выходная величина ток:


2) Двигатель


1.5. Интегрирующие звенья
Предположим, что выходной сигнал звена системы управления определяется как интеграл

от входного сигнала g (t), где k > 0 – постоянный коэффициент.
Переходная функция:


После преобразования Лапласа:

Передаточная функция


АЧХ:

ФЧХ:
Логарифмические характеристики:

Примеры звеньев.
1) Гидравлический демпфер.


2) Механическая часть электропривода


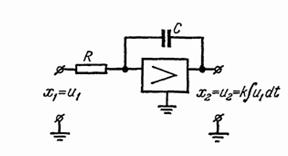
3)Интегратор на ОУ
1.6. Звено запаздывания
Представим себе трубу, через которую вентилятор прокачивает воздух. В начале трубы установлен нагреватель, а температура воздуха измеряется датчиком в точке А.

Очевидно, что при изменении температуры воздуха датчик обнаружит это не сразу, а через время τ= L / v, где L – длина трубы (в метрах), а v – скорость потока воздуха (в м/с). В этом случае говорят, что в системе есть транспортное запаздывание на величину τ (в секундах).

Запаздывание в системе просто сдвигает сигнал вправо на временной оси, не меняя его формы. Математически это можно записать в виде

Если применить преобразование Лапласа, то получим:

поэтому передаточная функция

Сводная таблица основных звеньев в ТАУ
| № | Звено и его ДУ | Передаточная функция |
| Безинерционное (пропорциональное) y (t) = kx (t) | k | |
Инерционное 1-го порядка (апериодическое)

| 
| |
Инерционное 2-го порядка (апериодическое)

| 
| |
Инерционное 2-го порядка (колебательное)

| 
| |
Идеальное дифференцирующее

| kp | |
Реальное дифференцирующее

| 
| |
Идеальное интегрирующее

| 
| |
| Звено запаздывания y (t) = x (t −τ) | 
|
Date: 2016-02-19; view: 643; Нарушение авторских прав