Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Биомеханическая модель человека
|
|
Биомеханика изучает в опорно-двигательном аппарате человека преимущественно те особенности его строения и функций, которые имеют значение для совершения (и совершенствования) движений.
При самом упрощенном подходе перемещение человека рассматривают как движение его общего ЦМ. В этом случае можно проследить лишь за перемещением тела человека в целом, оценить в известной мере общий итог его двигательной деятельности. Но остается неизвестным, в результате каких именно движений достигнуто перемещение общего ЦМ.
Учет особенностей движения отдельных звеньев тела позволяет более точно рассмотреть и перемещение человека в целом.
В первом приближении в биомеханике отвлекаются от деталей анатомического строения и физиологических механизмов опорно-двигательного аппарата и рассматривают упрощенную (рабочую) модель человека.
При этом стремятся, чтобы эта биомеханическая модель обладала основными свойствами, присущими моделируемому объекту, и обеспечивала бы использование современных методов исследования, в том числе применение аппарата теоретической механики.
При построении рабочей модели человека в биомеханике делают, как правило, следующие допущения:[5]
• Звенья модели (части тела человека) абсолютно твердые, то есть не деформируются ни при каких обстоятельствах.
• Геометрические параметры и масса звеньев модели (их длина и пр.) совпадают с соответствующими параметрами сегментов тела человека.
• Звенья модели соединены в идеальные кинематические пары сферическими (шаровыми) или цилиндрическими шарнирами.
При принятых упрощающих допущениях рабочая модель человека, представленная на рисунке 35, включает девять звеньев туловища и конечностей.
Туловище моделируется как одно жесткое звено, образованное верхней и нижней траверсами, которые соединены между собой продольным элементом.
Конечности человека представляют как замкнутые или разомкнутые кинематические пары, соединенные с туловищем шаровыми шарнирами. Считают, что звенья кинематических пар между собой соединены цилиндрическими шарнирами.
Для совпадения геометрических параметров модели с соответствующими параметрами сегментов человека шарниры модели совмещают с шарнирами скелета человека.
Модели такого типа нашли широкое применение в биомеханике и получили название базовых моделей. При исследовании движений человека они давно используются многочисленными авторами, начиная с Бернштейна Н. А. Известны труды многих исследователей (Донского Д. Д., Зациорского В. М. и др.), которыми накоплен богатый экспериментальный материал по определению геометрических и массовых параметров при моделировании человека.
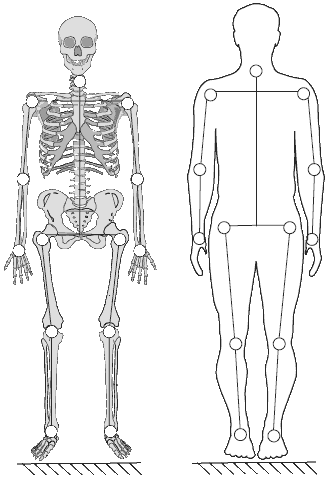
Рис. 35
Американской службой NАSА[6]на основании антропологических исследований большого количества людей получены экспериментальные данные о геометрических параметрах и положении ЦМ отдельных частей тела «среднего» человека.
Суммарное число степеней свободы биомеханической модели человека, как правило, больше шести. Его определяет наличие разомкнутых кинематических цепей, в основном верхних конечностей. В пределах подвижности сочленений с туловищем они могут иметь по четыре степени свободы (рис. 6).
Определяющим фактором является поза человека – взаимное расположение отдельных сегментов тела относительно друг друга. При изменении позы суммарное число степеней свободы изменяется, так как новой позе соответствует новое модельное представление человека.
В позе, соответствующей боевой стойке (рис. 6), биомеханическая модель имеет четырнадцать степеней свободы – (6+4+4).
В процессе выполнения двигательного действия разомкнутая цепь внезапно может получить связь в виде опоры или захвата, что резко ограничивает свободу движений. Следовательно, число степеней свободы биомеханической модели человека может изменяться в широком диапазоне.
Date: 2016-02-19; view: 1771; Нарушение авторских прав