Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Задание 3. Ознакомиться с основными характеристиками контрольно-измерительных приборов
|
|
Для оценки рационального использования приборов важно знать их характеристики и качественные показатели:
- погрешность (класс точности),
- вариацию,
- чувствительность,
- инерционность,
- надежность.
Любое измерение неизбежно сопровождается некоторыми ошибками. Ошибки, возникающие при измерениях, называются погрешностью. Они обусловлены несовершенством методов и средств измерения. Различают абсолютную, относительную и относительную приведенную погрешности.
Абсолютной погрешностью измерительного прибора называется разность между показанием этого прибора и действительным значением, найденным по образцовым прибора.
Относительная погрешность – это отношение абсолютной погрешности к действительному значению измеряемой величины.
Относительной приведенной погрешностью называется отношение абсолютной погрешности к разности верхнего и нижнего пределов шкалы прибора, выраженное в %..
В зависимости от характера погрешности делятся на систематические, промахи и случайные.
Систематическими называются такие погрешности, которые изменяются по определенному закону. Появление систематических погрешностей вызывают свойство и состояние применяемого прибора, способы его установки, условия работы измерительного устройства, метод измерения, индивидуальные особенности наблюдателя.
Систематические погрешности выражаются в виде разности результатов измерения рабочим и образцовым прибором. Эти разности, взятые с обратным знаком, составляют таблицу поправок к показаниям прибора.
Промахами называются погрешности, резко искажающие результат измерения. Они возникают при неправильном отсчете по шкале, неправильном включении прибора, неправильной записи показаний. Промахи устраняются при сопоставлении ряда измерений.
Случайными называются погрешности, которые не подчиняются известной закономерности. Они возникают в результате влияния на процесс измерения случайных причин. Влияние этих погрешностей на результат измерения можно оценить путем многократного измерения искомой величины.
Погрешность, соответствующая нормальным условиям работы прибора, называется основной. За нормальные условия принимают температуру 293 К (20 °С), давление 101325 Па, относительную влажность до 80 %, отсутствие вибрации, электрических и магнитных полей. При нарушении нормальных условий возникает дополнительная погрешность прибора.
Обобщенной характеристикой прибора является класс точности, определяемый предельными значениями допускаемых основных и дополнительных погрешностей.
Раньше под классом точности приборов понималось отношение абсолютной погрешности к диапазону шкалы, выраженное в процентах. Например, манометр класса 2,5 с предельными значениями шкалы 100 кгс/см2 (10 МПа), имеет дополнительную погрешность 2,5 кгс/см2 (0,25 МПа). Наиболее распространенные технические приборы имеют классы точности 0,2; 0,5; 1; 1,5; 2,5. Этими цифрами обозначают класс точности на шкалах.
В настоящее время класс точности устанавливается по абсолютной погрешности (порядковые номера классов).
Наряду с классом точности существуют и другие качественные характеристики приборов: вариация, чувствительность, инерционность и надежность.
Вариацией показаний прибора называется наибольшая разность между повторными показаниями прибора и действительным значением измеряемой величины в одинаковых условиях.
Вариацию обнаруживают при прямом и обратном ходе указателя шкалы до какого-либо определенного значения, когда указатель не доходит до этого значения с той или другой стороны.
Это возникает вследствие трения в опорах подвижных частей, наличия зазоров, остаточной деформации измерительных пружин.
Вариация выражается в процентах от диапазона шкалы прибора.
Чувствительностью прибора называется отношение линейного или углового перемещения его указателя к изменению значения величины, вызвавшей это перемещение.
Величина, обратная чувствительности, является ценой деления шкалы прибора.
Практически чувствительность приборов часто определяют по цене деления шкалы.
Наименьшее значение измеряемой величины, способное вызвать заметное изменение показания измерительного прибора, называется порогом чувствительности.
Наибольшее изменение измеряемой величины, не вызывающее отклонения указателя прибора, называется зоной нечувствительности.
Инерционностью прибора называется отставание во времени его показаний от изменения измеряемой величины. Так, при измерении температуры манометрическим термометром требуется определенное время для нагрева газа в термобаллоне и передачи повышения давления на чувствительный элемент, перемещающий стрелку прибора. Инерционность приборов особенно важно учитывать при контроле быстропротекающих процессов, где запаздывание показаний может привести к значительным погрешностям.
Надежность прибора характеризует сохранение его качественных характеристик, обеспечивающих нормальную работу в течение заданного времени. Надежность прибора определяется его безотказностью, долговечностью и ремонтопригодностью.
Свойство прибора непрерывно сохранять работоспособность в течение определенного времени называется безотказностью. Вероятность безотказной работы в течение заданного времени, частота отказов, наработка на отказ (среднее время между двумя неисправностями) служат основными показателями надежности прибора и автоматических устройств.
Долговечностью называется свойство прибора длительно сохранять работоспособность в заданных режимах до значительного износа.
Под ремонтопригодностью понимается свойство прибора восстанавливать работоспособность путем предупреждения, обнаружения и устранения неисправностей. Для повышения ремонтопригодности современные приборы конструируют с учетом максимального удобства замены элементов, часто выходящих из строя (электронные лампы, переключатели, электромеханические реле).
1-4. Контроль измерительных приборов
Для обеспечения единообразия, верности и правильного
применения мер и измерительных приборов установлен
определенный порядок их контроля. Для этой цели организована
Государственная служба мер и измерительных приборов во главе
с Государственным комитетом СССР по стандартам. Контроль-
ные операции осуществляются при помощи образцовых и
эталонных мер и приборов.
Основными операциями контроля приборов являются
испытание, градуировка и поверка.
При испытании вновь разработанные и предназначенные для
производства меры и приборы проходят всестороннюю проверку
для установления целесообразности их производства.
Градуировкой называется операция, при помощи которой делениям шкалы прибора придают значения, выраженные в единицах измерения. Эта операция осуществляется приборами
более высокой точности. По нескольким точкам значений
измеряемой величины строят градуировочные кривые, на основании
которых на шкалу наносят значения, соответствующие
определенным отметкам шкалы. Градуировка производится при
изготовлении приборов или при изменении условий их
применения.
Поверкой называется сравнение показаний поверяемых
приборов с показаниями образцовых для определения их
погрешности. При поверке, кроме определения погрешностей, проводят
внешний осмотр и опробование приборов, определяют
сопротивление электрической изоляции, качество записи показаний,
скорость передвижения диаграммной ленты. Все рабочие приборы
поверяют в лаборатории не реже одного раза в два года.-Кроме
того, приборы поверяются на месте установки: наиболее
ответственные– один раз в смену или сутки, все другие – от одного
раза в неделю до одного раза в три месяца. Поверка на месте
часто сводится к определению погрешности показаний прибора
на рабочей точке шкалы и правильности возврата стрелки к
нулевой точке.
1.5. Государственная система промышленных приборов
и средств автоматизации (ГСП)
Большая разнотипность измерительных приборов и средств
автоматизации затрудняет их эксплуатацию и ремонт. В целях
рационального использования средств измерения проводятся
работы по объединению отдельных систем приборов в рамках
Государственной системы приборов (ГСП).
ГСП представляет собой совокупность приборов и средств
автоматизации, предназначенных для получения, обработки и
использования информации. ГСП включает ряд
унифицированных блоков и устройств, имеющих единые параметры входных
и выходных сигналов, нормализованные габаритные и
присоединительные размеры.
Переход к разработке систем приборов, объединенных
одним принципом действия, позволяет получать большое число
разнообразных измерительных устройств из небольшого
количества типовых блоков. Кроме того, значительно повышаются на-
дежность и стабильность измерительных приборов, упрощается
их эксплуатация.
По роду вспомогательной энергии сигналов, а также виду
сигналов приборы и средства автоматизации делятся на 5 групп,
которые называются ветвями: электрическую аналоговую,
электрическую дискретную, пневматическую, гидравлическую,
приборов и устройств без источников вспомогательной энергии.
Электрическая аналоговая ветвь является системой, в
которой энергетическим сигналом информации служит непрерывный
электрический сигнал. Система состоит из устройств для
получения информации (преобразователей), приборов и
устройств для преобразования, хранения и обработки информации,
называемых центральной частью ветви. В центральной части
значительное место занимают вторичные приборы:
индикаторные, показывающие и регистрирующие, интеграторы, приборы
системы «по вызову». Пределы изменения токовых сигналов
постоянного тока выбираются из ряда значений 0–10 мВ. При
использовании переменного тока изменение сигнала выбирается
в пределах 0–1 и 0–2 В.
Электрическая дискретная (цифровая) ветвь является
системой, в которой энергетическим носителем информации
служит электрический дискретный сигнал в виде постоянного тока
или направления. Дискретная ветвь состоит из различных
приборов и средств автоматизации: преобразователей, блоков и
устройств централизованного контроля; устройств представления
информации; цифровых вычислительных устройств.
Использование основных блоков этой ветви позволяет обрабатывать
результаты измерений для непосредственного воздействия на
объект управления. Устройства цифровой техники дают
возможность решать ряд задач управления, которые не могут быть
осуществлены в аналоговой ветви. Кроме того, цифровые
устройства превосходят другие по надежности и простоте
эксплуатации. Параметры сигналов унифицированы. Так, частотные
диапазоны находятся в пределах 1500–2500 Гц.
Пневматическая ветвь является системой, в которой
энергетическим носителем информации служит пневматический
сигнал (давление сжатого воздуха). Благодаря высокой
надежности пневматической аппаратуры, простоте обслуживания,
невысокой стоимости, пожаро- и взрывобезопасности приборы этой
ветви получили широкое распространение в пищевой
промышленности. Они строятся из унифицированных универсальных
пневмоэлементов.
Рабочий диапазон изменения входных и выходных
пневматических сигналов находится в пределах 19,6–98 кПа.
Номинальное давление питания 140 кПа.
Гидравлическая ветвь представляет собой систему, в которой
энергетическим носителем информации является
гидравлический сигнал. В этой ветви мало приборов и устройств для при-
ема и выдачи информации в каналы связи, а также для
преобразования, хранения и обработки информации. Основным
преобразователем и усилительным элементом служит струйный
усилитель, преобразующий кинетическую энергию струи
жидкости в потенциальную, которая используется в последующих
усилителях.
Применение гидравлических регуляторов ограничено
спецификой вида энергоносителя сигналов (например, масло не
применяется на пожаро- и взрывоопасных производствах).
Устройства гидравлической ветви применяются там, где требуются
значительные перестановочные усилия для перемещения
регулирующих органов при плавности их хода и высокой
чувствительности. Давление рабочей жидкости лежит в пределах 1–
6,4 МПа.
Ветвь приборов и устройств, работающих без источников
вспомогательной энергии, является системой, использующей для
работы энергию той среды, параметры которой она измеряет и
регулирует. Например, для измерения давления часто
применяют трубчатые манометры, которые устанавливаются
непосредственно на аппаратах. При изменении давления в аппарате
трубка в манометре начинает изгибаться, механически
связанная с трубкой стрелка манометра отклоняется и показывает
действительное давление в аппарате. Структура ветви
охватывает регуляторы температуры, давления, расхода, уровня
и др.
По функциональным признакам каждая ветвь ГСП
подразделяется на устройства, предназначенные для получения
информации о состоянии процесса (преобразователи); для приема и
выдачи информации в каналы связи; для преобразования,
хранения и обработки информации; для использования информации
в целях воздействия на процесс и связи с оператором; для
одновременного выполнения нескольких из перечисленных
функций.
Контрольные вопросы
1. В чем заключается процесс измерения физических величин?
2. Как построена Международная система единиц (СИ)? Какие
преимущества она имеет перед другими системами единиц?
3. Какие технические средства применяются при измерениях?
4. По каким основным признакам классифицируются измерительные
приборы?
5. Что такое погрешность измерения и каковы ее разновидности?
6. Что называется классом точности прибора?
7. Какие технические характеристики применяются для оценки
возможностей прибора?
8. Что представляет собой ГСП и каковы ее^ примущества перед другими
системами?
9. По каким признакам и на какие ветви делятся в ГСП приборы и
средства автоматизации?
Г л а в а 2. СИСТЕМЫ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ
2.1. Основные понятия
Дистанционной системой передачи информации называется
устройство, передающее информацию на расстояние
(дистанцию) в пределах производственного комплекса. Информацией
в системах управления и регулирования производственными
процессами называют сведения о характеристиках и состоянии
процессов, выраженные посредством сигналов и символов. Для того
чтобы, сигнал, полученный от объекта управления или контроля,
стал доступен восприятию наблюдателя, его передают на
контрольно-измерительные приборы, смонтированные на
специальных щитах, с помощью дистанционных систем, состоящих из
следующих основных элементов:
преобразователя, находящегося под воздействием
измеряемой величины (воздействие может осуществляться от
чувствительного элемента средства измерения, находящегося во
взаимодействии с измеряемой средой, либо от промежуточного
преобразователя, занимающего определенное место в цепи
передачи);
линий связи, по которым передаются сигналы измерительной
информации, вырабатываемые преобразователем;
измерительного устройства, предназначенного для получения
сигнала измерительной информации в форме, удобной для
восприятия наблюдателем или для дальнейшего использования.
При необходимости изменения физического вида сигналов,
их усиления и модуляции (преобразования входного постоянного
напряжения в переменное) в систему дистанционной передачи
могут быть включены дополнительные, промежуточные
преобразователи.
Кроме того, в практике широко используются
преобразователи, обеспечивающие связь между различными ветвями ГСП,
а также преобразователи сигналов, предназначенные для
приведения естественных сигналов к унифицированному виду.
При передаче информации на большие расстояния
применяются электрические телемеханические устройства, работа
которых основана на их способности находить в большом
количестве сигналов, посылаемых по одной линии связи, сигнал
определенного вида.
2.2. Преобразователи сигналов дистанционных систем
передачи информации
Преобразователи систем дистанционной передачи
информации могут быть с естественными и унифицированными
сигналами.
Преобразователи с естественными сигналами. Под
естественным выходным сигналом понимается такая физическая
величина, в которую наиболее рационально и просто преобразуется
величина, измеряемая в первичном измерительном
преобразователе, например: электрическая –напряжение, ток,
сопротивление, частота или неэлектрическая –давление, перемещение,
усилие, угол поворота. В качестве примера системы и
преобразователя с естественным сигналом может служить
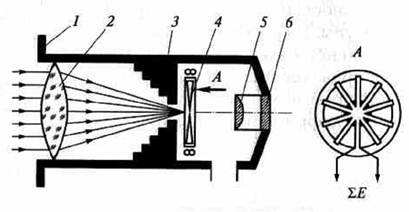
термоэлектрический термометр в комплекте с милливольтметром, схема
прямого измерения термоэлектродвижущей силы (термо-ЭДС)
которого приведена на рис. 2-1. Схема включает
термоэлектрический преобразователь (Г), термоэлектродные
(компенсационные) провода (777), термостатирующее устройство (ТС),
соединительные провода
(СП), уравнительное
сопротивление /?у, добавочное
сопротивление /?д и
милливольтметр (мВ). При
нагревании места соединения
(горячего спая ГС) электродов
в нем возникает термо-ЭДС.
Рис. 2-1. Схема прямого из- Величина ее при постоянной
Гс мерения термо-ЭДС температуре холодного спая
(to) однозначно зависит от
температуры нагрева, являющейся температурой
контролируемой среды. Здесь термоэлектрический преобразователь (Т)
выполняет роль первичного преобразователя, который преобразует
температуру в электрический сигнал (термо-ЭДС), удобный для
передачи на вторичный прибор (мВ)у установленный на
значительном расстоянии от объекта измерения.
Преобразователи с унифицированными сигналами. Эти
приборы позволяют преобразовывать сигналы, получаемые в
результате непрерывного измерения контролируемых параметров,
в пропорциональные сигналы определенной величины
постоянного тока, переменного тока, давления сжатого воздуха,
называемые унифицированным сигналом. Применение
преобразователей с унифицированными сигналами позволяет
сократить число видов вторичных приборов, обеспечить их
взаимозаменяемость и расширить применение машин
централизованного контроля.
Наибольшее распространение в пищевой промышленности
получили электросиловые, частотно-силовые и пневматические
унифицированные преобразователи, использующие принцип
силовой компенсации. Унифицированные
преобразователи обычно состоят из двух основных элементов:
измерительного блока, преобразующего значение измеряемого параметра
в механическое усилие, и силового устройства, преобразующего
это усилие в стандартный выходной сигнал.
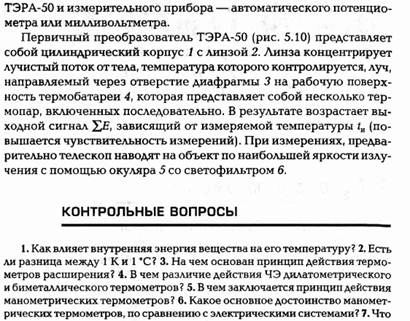
Унифицированный электросиловой
преобразователь. Действие преобразователя основано на
электрической силовой компенсации усилий. В измерительном блоке
(рис. 2-2) измеряемый параметр воздействует на
чувствительный элемент (сильфон, поплавок) и преобразуется в
механическое усилие Р. Если такое усилие изменяется, то происходит
перемещение рычажной системы / и связанного с ней
управляющего флажка 2 индикатора рассогласования 3. Это
перемещение индикатора преобразуется в управляющий сигнал
(напряжение переменного тока), поступающий на вход усилителя4.
Выходной сигнал постоянного тока с усилителя направляется
в линию дистанционной передачи и обмотку рамки 5 магнито-
* '/////, %
V
\Измеритель\
\ныиблок j
Выходной
шнсиг
Рис. 2-2. Схема унифицированного
электросилового преобразователя
Рис. 2-3. Схема унифицированного
частотно-силового преобразователя
электрического силового преобразователя 6, где преобразуется
в пропорциональное усилие обратной связи Ро. с» которое через
рычажную систему 1 уравновешивает усилие Р. Мерой
измеряемого усилия Р является текущее значение величины
постоянного тока (величины выходного сигнала преобразователя),
создающего уравновешивающее усилие Ро. с. Выходной
унифицированный сигнал постоянного тока изменяется в пределах 0–100
и 0–20 мА. Сигнал 0–5 мА обеспечивается применением
дополнительного преобразователя. Вторичными приборами,
подключаемыми к преобразователю, являются миллиамперметры:
показывающие, самопишущие, сигнализирующие, проградуиро-
ванные в соответствующих единицах.
Унифицированный частотно-силовой
преобразователь. Действие преобразователя основано на
преобразовании механического усилия в частоту собственных
поперечных колебаний струнного элемента. Преобразователь состоит из
изолированной струны 2 (рис. 2-3), расположенной между
полюсными наконечниками 1 постоянного магнита. Струна одним
концом жестко закреплена, а другим связана с рычагом 3,
установленным в опоре 5 и соединенным с пружиной 4.
Измеряемый параметр в измерительном блоке преобразуется в
механическое усилие Р, под действием которого происходит незначи-
тельная деформация упругого рычага 3 и струны 2. При этом
меняется частота собственных поперечных колебаний струны.
В результате взаимодействия протекающего по струне
переменного тока с магнитным полем колебания струны
преобразуются в изменение частоты электрического тока. Мерой
измеряемого усилия Р является текущее значение частоты
переменного тока выходного сигнала усилителя 6. Пределы измерения
выходного сигнала 1500–2500 Гц. Точное начальное значение
сигнала устанавливается пружиной 4. Сигнал может
передаваться на расстояние до 10 км. Частотно-силовые преобразова-
IL
r°c ■umiuirl
S
Выходной сигнал
(19,6-98нПа)
Рис. 2-4. Схема унифицирован- Рис. 2-5. Схема электропневматиче-
ного пневматического преобразо- ского преобразователя
вателя
тели применяются для измерения (при малых перемещениях)
массы, давления, разрежения, уровня, температуры.
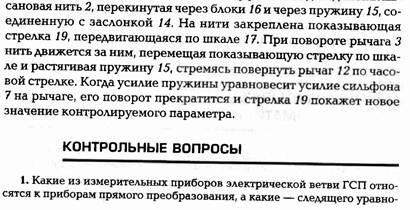
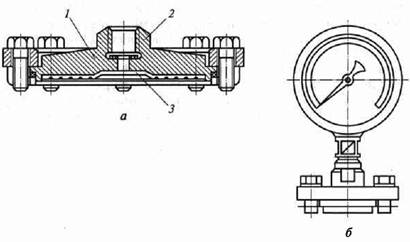
Унифицированный пневматический
преобразователь. Действие преобразователя основано на
пневматической силовой компенсации усилий. Чувствительный элемент
(например, мембрана манометра) измерительного блока
(рис. 2-4) преобразует измеряемый параметр в
пропорциональное усилие Р, под действием которого происходит
незначительное перемещение рычажной системы 1 и связанной с ней
заслонки 2. Сжатый воздух непрерывно поступает в сопло 3 и
выходит в атмосферу. Перемещение заслонки относительно сопла
вызывает изменение давления пневматического сигнала на
входе усилителя 4. Выходной сигнал усилителя направляется
в линию дистанционной передачи и одновременно в линию
обратной связи пневматического преобразователя 5, где
преобразуется в пропорциональное усилие обратной связи Ро. с,
уравновешивающее через рычажную систему 1 измеряемое усилие Р.
Таким образом, давление сигнала сжатого воздуха на выходе
усилителя является мерой контроля технологического
параметра. Пределы измерения выходного сигнала 19,6–98 кПа.
Максимальное расстояние передачи пневматического сигнала
300 м.
Вторичными приборами, измеряющими унифицированный
пневматический сигнал, могут быть различные показывающие,
самопишущие, сигнализирующие приборы и установки
централизованного контроля и регулирования.
Преобразователи для связи между ветвями ГСП. В технике
автоматизации часто приходится создавать комбинированные
системы, использующие энергию различных видов. В связи
с этим необходимо наличие преобразователей сигналов одного
рода энергии в сигналы другого рода, например
электропневматических, пневмоэлектрических, электрогидравлических и др.
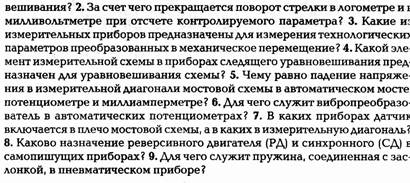
Электропневматический1 преобразователь.
Для преобразования токового сигнала в унифицированное
давление служат электропневматические преобразователи. Схема
одного из них приведена на рис. 2-5. Входной сигнал подается
из первичного измерительного преобразователя 1 в катушку 10
магнитного электрического преобразователя, соединенную с
рычагом 2. При изменении тока в катушке за счет его
взаимодействия с магнитным полем постоянного магнита 9 рычаг 2,
соединенный с пружиной 3, будет перемещаться с заслонкой 4
относительно сопла 5. В результате изменится давление сжатого
воздуха на выходе пневматического усилителя 6. Усиленный
пневматический сигнал направляется в линию дистанционной
передачи 7 и одновременно в сильфон обратной связи 5, где
преобразуется в пропорциональное усилие обратной связи Ро. с>
которое противодействует дальнейшему перемещению заслонки
до момента полного уравновешивания рычажной системы 2.
Вследствие этого давление сжатого воздуха, преобразованное
в усилие Ро. с, становится пропорциональным унифицированным
пневматическим сигналом.
Пневмоэлектрический преобразователь. В
качестве примера такого прибора может служить преобразователь
типа ПЭ-55М, преобразующий пневматический сигнал давления
сжатого воздуха 19,6–98 кПа в пропорциональный
электрический сигнал постоянного тока 0–5 мА. Сила, возникающая на
сильфоне от давления сжатого воздуха входного сигнала,
уравновешивается воздействием деформации сильфона и
измерительной пружины.
Перемещение дна сильфона преобразуется в угол поворота
управляющей оси универсального электронного механического
преобразователя, предназначенного для непрерывного
бесконтактного преобразования угла поворота в пропорциональный
электрический сигнал постоянного тока.
2-3. Виды систем дистанционной передачи информации
Системы дистанционной передачи информации по виду
энергии можно подразделить на пневматические и электрические.
Электрические системы в свою очередь подразделяются на диф-
ференциально-трансформаторные, ферродинамические, сельсин-
ные и омические.
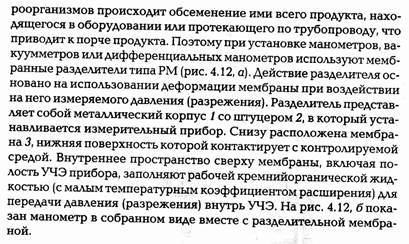
Пневматические дистанционные передачи. Одна из таких
передач показана на рис. 2-6. Она состоит из первичного
прибора /, включающего устройство для получения пневматического
выходного сигнала, канала связи /// и вторичного прибора //.
Первичными приборами могут быть манометр, вакуумметр, ма-
новакуумметр и др.
Изменение измеряемого давления, поступающего во
внутреннюю полость трубчатой пружины /, вызывает перемещение ее
свободного конца, которое пре-.
образуется посредством
передаточного механизма в движение
стрелки 2 относительно шкалы
3. Одновременно перемещение
конца трубчатой пружины
передается на заслонку 12 пневмо-
преобразователя посредством
тяги 4, рычажного механизма 9
и цилиндрической пружины 10.
Заслонка перемещается
относительно сопла //. Питающий
воздух под давлением 140 кПа,
контролируемым манометром б,
направляется в пневмореле 5,
где давление его понижается, и
через дроссель 8 попадает в
линию сопла. При этом под
действием давления, поступающего
во внутреннюю полость
трубчатой пружины 13 обратной связи, пружина деформируется,
отводя заслонку 12 от сопла на расстояние, обеспечивающее
давление воздуха в системе, пропорциональное измеряемому
параметру. Такое давление, контролируемое манометром 7,
является выходным сигналом, поступающим по каналу связи во
вторичный прибор или приборы системы автоматического
регулирование. При изменении измеряемой величины выходной
сигнал изменяется в пределах 19,6–98 кПа.
Электрические дистанционные передачи. Они обеспечивают
передачу команд и измерительной информации на большие
расстояния при малом запаздывании.
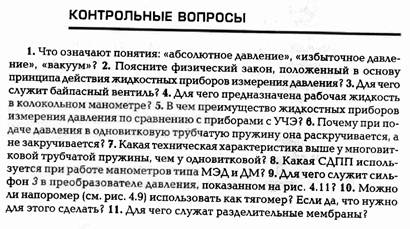
Дифференциально-трансформаторная
система передачи. Действие системы основано на принципе
компенсации разности трансформируемых напряжений в
катушках преобразователя и вторичного прибора. Система состоит
из двух одинаковых катушек Г/С, одна из которых находится
в первичном преобразователе ПП (рис. 2-7), а другая – во
вторичном приборе В/7. Каждая катушка имеет две обмотки. Пер-
Рис. 2-6. Схема пневматической
дистанционной передачи
вичная обмотка Wx равномерно намотана по всей длине
катушки, а вторичная W2 разделена на две равные секции, каждая
из которых расположена на половине первичной обмотки.
Внутри катушек находятся сердечники С. Если по первичным
обмоткам катушек, включенным последовательно, проходит
переменный ток, то во вторичных обмотках, включенных
навстречу одна другой, индуктируются переменные напряжения,
величина и фаза которых зависят от положения сердечников С
в катушках 7Х При среднем положении сердечников в обеих
катушках напряжения на вторичных обмотках равны между
собой. При изменении измеряемого технологического параметра
вп
Рис. 2-7. Схема дифференциально-
трансформаторной системы передачи
h tt~127в
Рис. 2-8. Схема дистанционной
передачи на ферродинамических
преобразователях
сердечник преобразователя ПП> связанный с чувствительным
элементом (мембраной, сильфоном) прибора, переместится.
Сердечники С в катушках окажутся в разных положениях, и во
вторичных обмотках преобразователя и вторичного прибора
возникнет разность потенциалов, поступающая на вход
электронного усилителя ЭУ. В усилителе эта разность потенциалов
усиливается до величины, необходимой для управления двигателем
РД, который с помощью профилированного диска Д
перемещает сердечник дифференциального трансформатора
вторичного прибора в положение, соответствующее положению
сердечника в катушке первичного прибора. В этот момент
результирующая разности потенциалов вторичных обмоток будет снова
равна нулю и реверсивный двигатель остановится.
Следовательно, каждому положению сердечника преобразователя,
определяемому величиной измеряемого параметра, соответствует
определенное положение сердечника катушки вторичного
прибора.
Реверсивный двигатель связан со стрелкой Е или
записывающим устройством вторичного прибора, которые фиксируют
значение контролируемого параметра. В качестве вторичных
приборов могут применяться показывающие, самопишущие и
регулирующие электронные приборы типов КД-140, КВД1, КСД1,
КСД2, КСДЗ, но наиболее распространен прибор типа КОД,
работающий с любыми приборами, имеющими катушки
дифференциально-трансформаторной системы. В настоящее время
эта система является одной из наиболее распространенных
в схемах тепловой автоматики различных отраслей пищевой
промышленности, например при контроле расхода пара на рас-1
пределительном коллекторе.
Дифференциально-трансформаторная система используется для передачи малых и средних
линейных перемещений (1–25 мм) чувствительных элементов
(мембран, сильфонов, поплавков), но наилучшие результаты
получаются при перемещениях 2–7 мм.
Ферродинамическая система передачи.
Действие системы основано на преобразовании угловых
перемещений преобразователей типа 2ИУФ (однофазные
трансформаторы с подвижной обмоткой) в пропорциональные значения
ЭДС переменного тока. Система состоит из выходного
преобразователя ДФ1 (рис. 2-8) первичного измерительного
прибора Я, компенсирующего преобразователя ДФН вторичного
прибора В, электронного усилителя ЭУ и реверсивного
двигателя РД. Рамка преобразователя ДФ1 связана кинематически
с измерительной системой (чувствительным элементом)
первичного прибора, поэтому угол поворота рамки си
преобразователя и развиваемая им ЭДС Е\ определяются значением
измеряемой величины.
Рамка преобразователя вторичного прибора механически
связана с реверсивным двигателем, поворачивающим ее на угол
ct2, при котором преобразователь вторичного прибора развивает
ЭДС Е2.
Рамки ДФ1 и ДФН соединены так, что развиваемые ими
ЭДС направлены встречно. При &Е=Е\–£2=0 система
находится в равновесии. Если величина контролируемого параметра
изменяется, то изменяются угол си и ЭДС Е\. Равновесие
системы нарушается, и на вход электронного усилителя подается
разность ЭДС (Д£). Напряжение с выхода электронного
усилителя поступает на реверсивный двигатель, поворачивающий
рамку ДФН до момента, когда АЕ=Е\–£2=0. Одновременно
двигатель поворачивает стрелку вторичного прибора,
непрерывно показывающего значение контролируемой величины.
Обмотки возбуждения преобразователей ДФ1 и ДФН включены
последовательно, благодаря чему устраняется погрешность,
вызываемая изменением напряжения питающей сети и влиянием
сопротивления линии связи. Вторичными приборами этой
системы служат показывающие, самопишущие и регулирующие
типы ВФС.
Сельсинная система передачи. Рассмотренные
системы передачи показаний могут передавать небольшие линей-
иые (до 20 мм) и угловые (до 40°) перемещения
чувствительных элементов преобразователей. Для значительных линейных
и угловых перемещений применяют сельсинную систему
передачи, преобразователем которой служит сельсин.
Сельсинная система (рис. 2-9) состоит из
сельсина-преобразователя (ведущего) и сельсина-приемника (ведомого),
имеющих одинаковую конструкцию и соединенных электрической
линией синхронной связи. Сельсин представляет собой небольшую
синхронную электрическую машину с двумя обмотками. Одна
из них (однофазная – обмотка возбуждения ОВ) подключается
к сети переменного тока, а концы другой (трехфазной – об-
Сельсин
ведущий
J34
Рис. 2-9. Схема
дистанционной передачи с
сельсинами
Рис. 2-10. Схема
дистанционной передачи с
реостатными преобразователями
мотки синхронизации ОС) соединяются между собой. Если
ротор ведущего сельсина будет поворачиваться усилием
чувствительного измерительного прибора, то ротор сельсина-приемника
будет синхронно следовать за движением ротора
преобразователя. При этом каждому положению ротора
сельсина-преобразователя соответствует только одно устойчивое положение
сельсина-приемника, соединенного с отсчетной частью вторичного
прибора. В этот момент оси полюсов роторов обеих машин
располагаются одинаково относительно соответствующих статор-
ных обмоток.
Омическая система передачи. Одной из
распространенных дистанционных передач является омическая
(реостатная), в которой сигналы, получаемые при перемещении
чувствительных элементов, преобразуются с помощью реостатов
в сигналы электрического напряжения или силы тока,
передаваемые в линию дистанционной передачи. Переменным
параметром является активное проволочное или непроволочное
сопротивление, распределенное линейно или по некоторому
закону по пути перемещения движка реостатного
преобразователя или потенциометра.
В качестве вторичных приборов при использовании
реостатных преобразователей применяются вольтметры,
милливольтметры, миллиамперметры постоянного и переменного тока, ло-
гометры, автоматические потенциометры и мосты.
На рис. 2-10 приведена принципиальная мостовая схема
дистанционной передачи с использованием двух реостатных
преобразователей, один из которых, установленный во вторичном
приборе </, является передающим, а второй, установленный
в дублирующем приборе 2, выполняет функции следящего.
Преобразователи с постоянными резисторами /?i, /?2, Иг и R*
составляют схему автоматического уравновешенного моста.
Подгонка сопротивлений соединительных проводов до заданного
значения осуществляется при помощи резисторов /?п, #п.
Если равновесие мостовой схемы нарушается, перемещением
движка реостатного преобразователя на вход усилителя
подается напряжение небаланса с вершин а и Ь. Этот сигнал
усиливается до значения, необходимого для приведения в действие
реверсивного двигателя РД. При достижении равновесия
мостовой схемы вал реверсивного двигателя, кинематически
связанный с движком реостатного преобразователя и кареткой
указателя, останавливается. При этом движок и каретка с
указательной стрелкой занимают положение, соответствующее
измеряемой величине, т. е. показанию вторичного прибора.
Достоинством рассмотренной схемы дистанционной передачи
является высокая точность и независимость показаний от
изменения напряжения питания, которое может осуществляться как
переменным, так и постоянным током.
2.4. Телемеханические системы передачи информации
Дистанционные системы передачи, описанные выше,
экономически оправдывают себя при радиусе действия несколько сот
метров. При более значительных расстояниях используют
дистанционные передачи в виде телемеханических систем,
сущность которых заключается в том, что по каналу связи
передается не сама измеряемая величина, а преобразованная, более
удобная для передачи на большие расстояния,–
телемеханический сигнал. Различают телемеханические системы ближнего
(15–30 км) и дальнего действия. В системах ближнего действия
измеряемая величина преобразуется в эквивалентные значения
тока или напряжения, используемые для передачи по линии
связи. В системах дальнего действия измеряемая величина
преобразуется в импульсы тока или в переменный ток меняющейся
частоты. Поэтому они получили название импульсных и
частотных.
Обобщенная структурная схема телемеханической системы
приведена на рис. 2-11. Информация, передаваемая источником
с помощью преобразователя /, преобразуется в непрерывный
или дискретный сигнал. Непрерывным называется сигнал,
у которого параметр, несущий информацию, может принимать
любое значение в некоторых заданных границах (например,
первичный сигнал, представляющий собой синусоиду с частотой,
которая в зависимости от передаваемой информации может
принимать любое значение от 27 до 44 Гц).
Дискретным называется сигнал, у которого параметр,
несущий информацию (амплитуда, фаза или частота), может
принимать несколько заданных значений (например, первичный
сигнал одного сигнального аварийно-предупредительного
устройства, представляющий собой постоянный ток, амплитуда
которого может принимать значение либо +1, либо –1).
Рис. 2-11.
Структурная схема
телемеханической системы
Источник
итрормацщ
Преобразо
батель!
Канал
сбязи
В б од информации
Преобразо-
6am ель II
информации
Вывод информации
. Для передачи телемеханических сигналов линии связи во
многих случаях используются многократно. По ним
осуществляется независимая передача сообщений от различных источников
информации к соответствующим ее получателям. С помощью
канала связи обеспечивается независимая передача
телемеханических сигналов. На одной линии может быть образована
группа каналов связи. В большинстве случаев для образования
каналов связи на проводных линиях выделяют стандартные
телефонные и телеграфные каналы, по которым передаются
сигналы телемеханики.
На приемном конце линии связи преобразователь РП
расшифровывает сигнал, который воспринимается получателем
информации. При этом операции ввода или вывода информации
в телемеханической системе частично или полностью
автоматизированы. Например, в системах автоматического контроля ввод
информации осуществляет преобразователь, а в системах
управления командная информация воспринимается исполнительным
органом, автоматически отрабатывающим посланную команду.
Устройства телемеханики подразделяются на системы
телеизмерения (ТИ), телесигнализации (ТС), телеуправления (ТУ),
телерегулирования (ТР), аварийно-предупредительной
сигнализации (АПС).
Системы телеизмерения осуществляют передачу значений
величин, характеризующих режим работы контролируемого объ-
екта, для визуального наблюдения за этими величинами,
регистрации их или ввода в ЭВМ.
2 Заказ № 1334 33
Системы телесигнализации осуществляют передачу
информации о состоянии контролируемых объектов.
Системы телеуправления предназначены для передачи
команд управления, которые воспринимаются исполнительными
механизмами управляемых установок. С помощью этой системы
производится отключение оборудования, изменение нагрузок,
вызов ТИ и другие управляющие воздействия.
Системы телерегулирования применяются для регулирования
технологического процесса.
Наиболее часто применяются телемеханические системы
телеизмерения, которые подразделяются на число-импульсные,
частотно-импульсные и время-импульсные.
пу
Рис. 2-12. Схема число-
импульсной системы
*j ки
Число-импульсная система является самой простой
и наиболее распространенной. Она основана на передаче по
линии связи числа импульсов постоянного тока,
пропорционального изменению измеряемой величины, например уровня
жидкости. На рис. 2-12 приведена схема системы, состоящая из
передающего устройства ПУ, приемного устройства УП и линии
связи. Перемещение поплавка 1, вызванное изменением уровня
жидкости, с помощью противовеса 2 и троса 3 приводит во
вращение блок 4 и связанное с ним через редуктор зубчатое
колесо 5. При изменении уровня зубчатое колесо большее или
меньшее число раз замыкает левые или правые контактные
пары преобразователя импульсов ДИ. В результате в линию
связи к обмотке якоря поляризованного реле ПР посылаются
импульсы постоянного тока: положительные – при замыкании
К\ или отрицательные – при замыкании /Сг. При замыкании К\
в приемном устройстве УП срабатывает поляризованное реле
ПР, и контактная группа Къ замыкает местную батарею на
электромагнит Э\. В случае замыкания контактов /G
поляризованное реле контактной группой Ка замыкает ту же батарею на
электромагнит Эъ. Якорь притягивается электромагнитом,
собачка 6, соединенная с концом якоря, передвигает храповик Р,
и стрелка 7 измерительного прибора перемещается. Число
импульсов, посылаемых ПУ в линию связи, пропорционально ве-
личине перемещения поплавка, вследствие чего угол
отклонения стрелки всегда пропорционален измеряемому уровню.
Поэтому шкала 8 прибора градуирована в единицах измерения
уровня. К недостаткам системы относится ложная информация
при обрыве или замыкании в канале связи, повреждении
источников питания и контактных групп.
В частотно-импульсной системе сигналы
передаются с частотой, пропорциональной изменению измеряемой
величины. Частотно-импульсные системы первоначально получили
развитие в энергетике в основном для телеизмерения мощности
переменного тока. Для получения импульсов тока, следующих
с частотой, пропорциональной измеряемой мощности, оказалось
удобным применить индукционный счетчик электроэнергии.
Такой счетчик, используемый в качестве преобразователя
импульсов, снабжается токопрерывающим устройством, которое при
повороте диска счетчика на определенный угол осуществляет
замыкание или размыкание линейной связи. При этом в линию
связи посылаются импульсы с частотой, пропорциональной
измеряемой мощности. Приемное устройство измеряет частоту
импульсов тока в канале связи и воспроизводит результат
отклонением стрелки милливольтметра.
Во время-импульсной системе в канал связи
периодически посылаются импульсы продолжительностью,
зависящей от измеряемой величины. В передающем устройстве
продолжительность импульса зависит от угла отклонения стрелки
первичного измерительного прибора (для этого применяется
контактное устройство, приводимое в движение синхронным
электродвигателем). На приемном устройстве устанавливается
чувствительное электромагнитное реле, которое срабатывает от
каждого импульса тока, поступающего от линии связи, и
замыкает цепь электрической батареи на измерительный прибор.
Прибор измеряет среднее значение тока.
2.5. Вторичные приборы
Вторичные приборы служат для преобразования сигналов,
полученных от первичных приборов, и измерения их величины.
Одновременно с измерением вторичные приборы могут
осуществлять регистрацию измеренной величины, суммирование
мгновенных значений, сигнализацию предельных значений и другие
Функции.
Типовыми системами вторичных приборов для измерения
величин, преобразуемых в электрическое сопротивление и
напряжение электрического тока, служат автоматические
уравновешенные мосты и автоматические потенциометры.
Автоматические уравновешенные мосты широко
применяется в различных отраслях пищевой промышленности. Эти
приборы имеют одну измерительную схему (рис. 2-13), состоящую
* 35
из четырех сопротивлений /?i, /?2, /?з, Ra, причем сопротивление
/?4 переменное и изменяется пропорционально измеряемой
величине. Для уравновешивания моста в его схему включен реохорд
/?Р, движок которого связан с реверсивным двигателем РД.
В диагональ питания аЬ включен источник питания (/, в
измерительную cd – электронный усилитель ЭУ. В результате
изменения измеряемой величины сопротивление /?4 изменяется и
равновесие моста нарушается, на вход усилителя подается
напряжение небаланса. Вследствие этого включается реверсивный
двигатель РД, который перемещает движок реохорда, пока не
наступит равновесие моста. При этом каждому значению
измеряемой величины соответствует определенное значение
сопротивления /?4- Поэтому
положение движка реохорда при
уравновешивании моста всегда
будет соответствовать
определенному значению
измеряемой величины, что позволяет
градуировать шкалу прибора
в единицах измеряемой
величины. В схему
уравновешенного автоматического моста
входят также сопротивление Rm
шунта реохорда, служащего
для подгонки сопротивления
/?р до заданного
нормированного значения; сопротивления
RH и Rn для подгонки предела измерения моста; сопротивления
#л для подгонки сопротивлений соединительных проводов.
(Температура окружающей среды оказывает влияние на
сопротивление соединительных проводов, что приводит к погрешностям при
измерениях. Для исключения этого влияния применяют трех-
проводную схему подключения преобразователя.)
Питание измерительной схемы уравновешенных мостов
осуществляется переменным током напряжением 6,3 В, частотой
50 Гц от вторичной обмотки силового трансформатора
усилителя.
Питание силовой цепи приборов производится от сети
переменного тока напряжением 220 В, частотой 50 Гц.
Автоматические потенциометры широко применяются в
различных отраслях пищевой промышленности для измерения
температуры, давления, расхода, уровня и других величин,
изменение которых может быть преобразовано в изменение
напряжения постоянного тока. Принцип действия этих приборов
основан на уравновешивании (компенсации) измеряемой ЭДС
известным напряжением, полученным от строго определенного тока,
называемого обычно рабочим; при этом компенсирующее
напряжение измеряется с высокой точностью. Потенциометры бы-
Рис. 2-13. Измерительная схема
уравновешенного автоматического
моста
вают ручные (переносные, лабораторные) и автоматические. Ха-.
рактерной особенностью автоматических потенциометров в
отличие от переносных и лабораторных является то, что
регулирование компенсирующего напряжения перемещением движка
по реохорду производится не вручную, а автоматически с
помощью электронного усилителя и реверсивного двигателя.
2.6. Системы передачи информации в АСУ ТП
В общей структуре комплекса технических средств АСУ ТП
особое место занимают средства систем сбора, передачи и
отображения информации.
Система сбора информации о характеристиках и состоянии
технологического объекта управления в АСУ ТП включает
измерительные датчики, которые вырабатывают электрические
токовые (аналоговые), электрические частотные (дискретные),
пневматические и гидравлические выходные сигналы, а также
автоматизированные средства сбора, обеспечивающие ввод
цифровой информации в ЭВМ с перфокарты, перфоленты и
графической информации.
Электрические измерительные датчики могут иметь на
выходе сигналы постоянного и переменного тока. Каждый из
электрических сигналов подвергается модуляции, с помощью
которой формируется сигнал, несущий информацию. Например,
у постоянного тока информационным параметром является
напряжение или ток, у переменного тока – амплитуда, частота и
фаза, у электрических импульсов – длительность импульса,
частота и фаза. В зависимости от диапазона изменения
вышеперечисленных параметров их разделяют на сигналы высокого (0–
5 мА, 0–20 мА, 0–100 мА; 0–5 В; 0–10 В) и низкого уровня
(0–100 мВ). Непосредственно на вход ЭВМ может
передаваться информация сигналами низкого уровня от
термопреобразователей (изменение ЭДС), термопреобразователей
сопротивления (изменение сопротивления), потенциометров
(изменение напряжения) и сигналами высокого уровня от датчиков, на
выходе которых формируются сигнал изменения тока,
напряжения и дискретные сигналы (от контактных и бесконтактных
Датчиков).
До непосредственного ввода в ЭВМ осуществляется
функциональное преобразование сигналов от пневматических и
гидравлических датчиков, обеспечивающее получение линейной
зависимости между значением контролируемого параметра и
входным сигналом.
Функциональное преобразование, унификация сигнала,
поступающего на ЭВМ, осуществляются с помощью
измерительных и нормирующих преобразователей с унифицированными
выходными сигналами, выбираемых из номенклатуры устройств
* v-»n.
Ввод в ЭВМ измерительной и цифровой информации
обеспечивается системами передачи, в состав которых входят
коммутатор аналоговых сигналов, аналого-цифровой преобразователь
(АЦП), коммутатор цифровых сигналов и устройство приема
цифровой информации.
После обработки входной информации о состоянии объекта
управления ЭВМ формирует управляющую и контрольную
информацию в виде цифровых кодов. Однако командная и
контрольная информация на регуляторы, исполнительные
механизмы и вторичные приборы должна поступать в виде
непрерывных величин. Поэтому система передачи информации от
ЭВМ предусматривает наличие коммутатора цифровых
сигналов управляющих воздействий и цифро-аналоговых
преобразователей.
В зависимости от вида примененных исполнительных
устройств и регуляторов выходные команды ЭВМ необходимо
преобразовывать в унифицированные электрические или
пневматические сигналы. Осуществляется это с помощью
соответствующих преобразователей, серийно выпускаемых отечественной
промышленностью.
Для наглядного представления протекания технологического
процесса, а также для «совета» оператору, как дальше вести
процесс, используется система отображения информации.
В качестве устройств отображения информации
используются цифровая и алфавитно-цифровая печать, экранные пульты
(дисплеи), мнемосхемы, средства сигнализации и оповещения
обслуживающего персонала.
Итак, входные-выходные устройства ЭВМ с помощью
преобразователей позволяют осуществлять прием в ЭВМ
информации от датчиков, передавать из ЭВМ управляющие воздействия
на исполнительные устройства – регуляторы, а также наглядно
контролировать протекание технологического процесса.
Контрольные вопросы
1. Что называется дистанционной системой передачи информации?
2. Что такое унифицированный выходной сигнал?
3. Какие бывают преобразователи для получения унифицированных
сигналов?
4. Как осуществляется связь между ветвями ГСП и какие технические
средства при этом применяются?
5. Какие бывают виды систем дистанционной передачи информации?
6. В чем заключается сущность телемеханической системы передачи
информации?
7. Как подразделяются устройства телемеханики по выполняемым
функциям?
8. Какие основные системы телеизмерения применяют для измерения
технологических параметров?
9. Что понимают под вторичным прибором и какие основные функции он
может выполнять в системе дистанционной передачи?
10. На каком принципе основаны мостовые схемы для измерения
электрического сопротивления?
П. В чем заключается компенсационный метод измерения напряжения,
используемый в схемах автоматических потенциометров?
12. Каково назначение аналого-цифровых и цифро-аналоговых
преобразователей ЭВМ?
Глава 3.














Date: 2015-05-23; view: 2095; Нарушение авторских прав