Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Лекция. Автоматическое регулирование возбуждения и форсировка системы возбуждения для повышения устойчивости энергосистем
|
|
Содержание лекции: автоматическое регулирование возбуждения, электромашинные системы возбуждения, АРВ сильного действия, форсировка системы с целью сохранения устойчивости, области устойчивости.
Цель лекции: изучить методы выбора закона регулирования АРВ для сохранения статической и динамической устойчивости.
Причинами нарушения статической устойчивости станции, передающей мощность в энергосистему, могут быть: снижение эквивалентной э.д.с. Е1 передающей станции или напряжения Uс на приемном конце электропередачи.
Процесс нарушения статической устойчивости характеризуется постепенным нарастанием тока и реактивной мощности по линии, снижением напряжения на подстанциях с последующим лавинообразным протеканием процесса и периодическими колебаниями таких электрических параметров, как токи, мощность, напряжения. Типичная осциллограмма нарушения статической устойчивости приведена на рисунке 2.1.
Нарушения статической устойчивости в энергосистемах структуры I происходят главным образом в послеаварийном режиме вследствие отключения одной из сильно загруженных параллельных линий, т.е. увеличения x∑. Кроме того, имеют место нарушения устойчивости, обусловленные понижением напряжения в приемной или передающей частях энергосистемы. В частности, наблюдались случаи нарушения устойчивости гидростанций в период их ввода в эксплуатацию при работе с временными схемами возбуждения в результате потери возбуждения генераторов (т.е. снижение эквивалентной э.д.с. станции Е1 и как следствие нарушение статической устойчивости). Причиной нарушения статической устойчивости было также возникновение дефицита реактивной мощности в приемной системе конечной мощности.
Основной широко используемый способ повышения статической устойчивости – автоматическое регулированияя возбуждения генераторов [2, 11].
Все системы возбуждения современных турбоагрегатов можно разделить на две группы: электромашинные системы возбуждения, постоянная времени которых составляет 0,3—0,5 с из-за наличия электромагнитной инерции возбудителя; системы возбуждения с управляемыми выпрямителями, постоянная времени которых составляет 0,04—0,05 с и не зависит от источника питания выпрямителя.
До последнего времени для возбуждения турбо- и гидрогенераторов в основном применялись возбудители постоянного тока, сочлененные непосредственно с валом основного генератора.
Для работающих турбоагрегатов 200—800 МВт и проектируемых агрегатов мощностью свыше 1000 МВт выполнение обычных электромашинных возбудителей, соединенных с валом генератора, из-за большой требуемой мощности возбудителя оказывается технически очень сложным. Для них создаются новые системы возбуждения в основном с применением ионных и полупроводниковых управляемых выпрямителей.
С электромашинными системами возбуждения, как правило, используются АРВ пропорционального типа, которые регулируют возбуждение по отклонению одного-двух параметров. С системами возбуждения с управляемыми выпрямителями применяются АРВ сильного действия, которые производят регулирование, как по отклонению режимных параметров, так и по их производным.
С точки зрения обеспечения устойчивости (как статической, так и динамической) энергосистем целесообразно сопоставить различные системы возбуждения крупных турбогенераторов и АРВ по их быстродействию, кратности форсировки, повышению пределов устойчивости, демпфированию колебаний в переходных процессах. С этих позиций любую систему возбуждения и АРВ можно охарактеризовать постоянной времени возбудителя τе, постоянной времени регулятора тр, кратностью потолочного возбуждения ke, скоростью нарастания возбуждения υe, законом регулирования и коэффициентами усиления АРВ. В ГОСТ на синхронные машины по системам возбуждения и АРВ регламентированы только две величины ke и υe:
Таблица 9.1
| Наименование генератора | ke, ед. ном.возб. | vе, ед.возб/с |
| Турбогенераторы, Гидрогенераторы | ||
| Р<50 МВт | 1,8 | |
| Р*>50 МВт | — | — |
*Оговариваются особо заказчиком.
К электромашинным системам возбуждения с АРВ пропорционального типа относятся высокочастотная система возбуждения, электромашинная с возбудителем постоянного тока с компаундированием, корректором и релейной форсировкой, электромашинная с редукторным приводом, бесщеточная. В АРВ, работающих с этими системами возбуждения, обычно применяется регулирование по отклонению напряжения ΔU при наличии компаундирования по ΔI. Практически при расчетах синхронной динамической устойчивости (§ 2-2) можно учитывать только регулирование по ΔU, а для электромашинной системы с компаундированием, корректором и релейной форсировкой — только действие релейной форсировки, поскольку постоянная времени корректора примерно равна τкорр≈2 с и его действие не оказывает влияние на первые периоды переходного процесса, а компаундирование очень незначительно увеличивает нарастание возбуждения только в процессе к.з.
В высокочастотной системе возбуждения (см. исунок 9.1) выпрямление переменного тока осуществляется неуправляемыми кремниевыми выпрямителями. В качестве возбудителя ВГТ используется индукторный генератор 500 Гц, имеющий три обмотки: одну, включенную последовательно с обмоткой возбуждения генератора и две независимые. Две последние обмотки питаются либо от под возбудителя (как показано на схеме), либо от выводов ВГТ.
Регулирование возбуждения выполняется по отклонению напряжения ΔU, причем kΔU =20÷50 ед. возб./ед. напр., т.е. при минимальном значении kΔU и при снижении напряжения на 5% система возбуждения обеспечивает дополнительно 1 ед. возб.
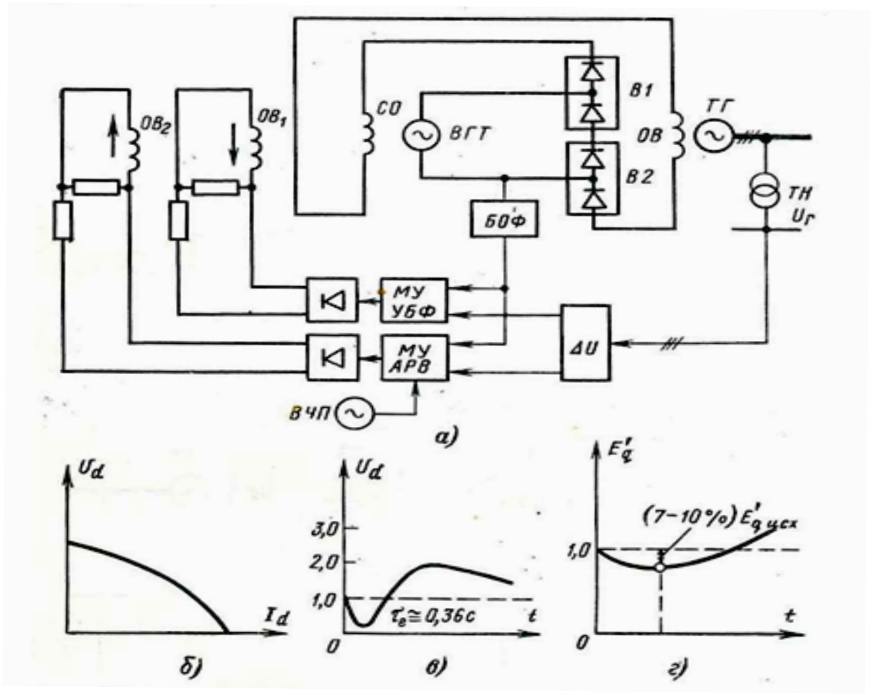
а – принципиальная схема высокочастотная система возбуждения; б – нагрузочная характеристика возбудителя; в – изменение напряжения возбуждения в переходном режиме; г — изменение э.д.с. Е'q в переходном режиме; ТГ — турбогенератор; БОФ — блок ограничения форсировки; АРБ — автоматический регулятор возбуждения; УБФ — устройство бесконтактной форсировки; ОВ1 — обмотка независимого возбуждения, питающаяся от УБФ; ОВ2— обмотка независимого возбуждения, питающаяся от АРБ; СО — последовательная обмотка возбудителя; ВГТ—высокочастотный возбудитель; БЧП — высокочастотный под возбудитель; ОБ — обмотка возбуждения основного турбогенератора; В1, В2 — выпрямители.
Рисунок 9.1 - Высокочастотная система возбуждения
С точки зрения статической устойчивости высокочастотная система возбуждения с АРВ пропорционального типа аналогична другим электромашинным системам возбуждения и обеспечивает выполнение практического критерия устойчивости
 (9.1)
(9.1)
где E'q — переходная э.д.с. в предельном режиме.
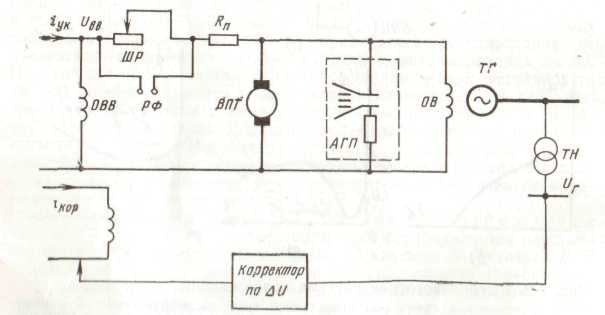
ТГ — турбогенератор; iyK—ток компаундирования; iкор — ток корректора напряжения; РФ-релейная форсировка; Rп -постоянно включенное активное сопротивление; АГП — автомат гашения поля; ВПТ — возбудитель постоянного тока;
ШР — шунтовой реостат; ОВ – обмотка возбуждения основного генератора;
ОВВ — обмотка возбуждения возбудителя.
Рисунок 9.2 - Принципиальная схема электромашинной системы возбуждения с компаундированием, корректором и релейной форсировкой
Date: 2015-05-18; view: 1560; Нарушение авторских прав