Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Краткие теоретические сведения. Трехфазный асинхронный двигатель
|
|
Трехфазный асинхронный двигатель
Целью работы является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n 1 определяется по формуле
n 1 =  , об/мин (1)
, об/мин (1)
где f 1 - частота сети, Гц;
р - число пар полюсов.
Разность в частотах вращения ротора n 2 и поля статора n 1 выражают скольжением
s =  (2)
(2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с f = 50 Гц.
Таблица 1.
| Частота вращения при s н = 5% | Число пар полюсов на статоре | ||||
| Поля статора n 1, об\мин | |||||
| Ротора n 2, об\мин |
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Y/Δ, 380/220 В.
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n 1 = (1– s 1), об/мин. (3)
Электрическая мощность Р 1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность Р 2 на валу и потери мощности на нагрев обмоток статора и ротора Δ Р э1 и Δ Р э2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис Δ Р ст и на потери от трения в подшипниках Δ Р тр.
Таким образом,баланс мощности в двигателе выразится так
Р 1 = Р 2 + Δ Р тр + Δ Р э + Δ Р ст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
Р 1 = 3 Р 1ф, Вт, (5)
где Р 1ф = U 1ф ∙ I 1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Р мех складывается из полезной мощности на валу Р 2 и потерь на трение Р тр
Р мех = Р 2 + Р тр, Вт. (6)
Механическая мощность может быть определена по формуле
Р мех = 0,105 М ∙ n 2, Вт, (7)
где М – вращающий момент, Нм;
n 2 – частота вращения ротора, об\мин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали Δ Р ст, практически не изменяются при увеличении нагрузки на валу Р 2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди Δ Р э зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η определяется как отношение полезной мощности на валу Р 2 к потребляемой из сети Р 1
η =  =
=  (8)
(8)
Полезная мощность двигателя на валу Р 2 может быть определена по формуле
Р 2 = М ∙ ω = М ∙  , Вт (9)
, Вт (9)
или Р 2 = 0,105 М ∙ n 2, Вт. (10)
Тогда
η =  =
=  =
=  , (11)
, (11)
где U 1ф, В; I 1ф, А; Cos φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р 1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos φф =  =
=  (12)
(12)
В лабораторной работе коэффициент мощности Cos φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n 2 = f (M), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
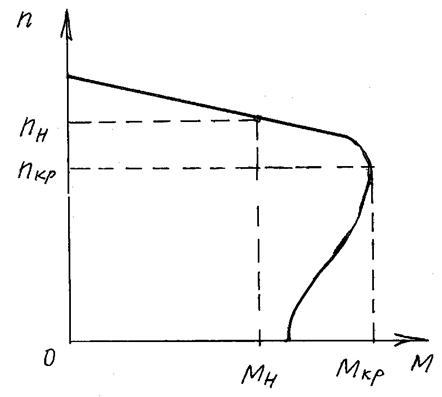
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М =  , Нм (13)
, Нм (13)
где U 1ф – фазное напряжение обмотки статора, В;
n 1 – синхронная частота вращения магнитного поля статора, об/мин;
s – скольжение;
р – число пар полюсов;
R 1, R 2’, Х к – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
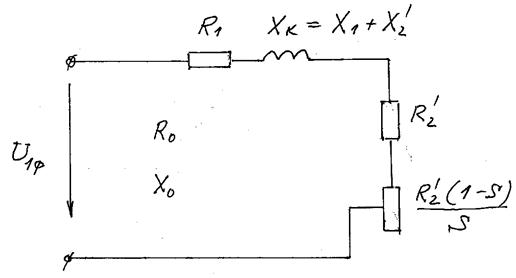
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате  , скольжения s, частоты тока в статоре f 1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
, скольжения s, частоты тока в статоре f 1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s при остальных постоянных в формуле вращающего момента можно получить различные значения моментов М н, М кр, М п, показанных на естественной механической характеристике (рис.1).
Номинальный вращающий момент М н может быть определен по формулам
М н = 9,55  , Нм (14)
, Нм (14)
или
М н = 9,55  , Нм (15)
, Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р 2н, U 1н, s н, n 2н, М н, М кр/ М н, Сos φн и способ соединения обмоток статора.
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n 2, вращающего момента М, скольжения s тока фазы статора I 1ф, коэффициента мощности Сos φ и к.п.д. двигателя от полезной мощности на валу Р 2 при U 1 = Const и f 1 = Const.
При повышении Р 2 величина скольжения s увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
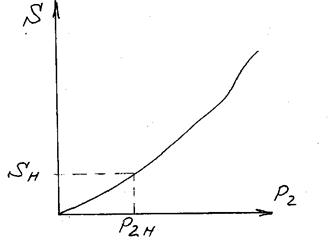
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р 2 = 0, частота вращения ротора n 2 может быть принята равной частоте вращения магнитного поля статора n 1 и s = 0.
Так как Р 2 ≈ Р мех , а Р мех = 0,105 М ∙ n 2, то рабочая характеристика
n 2 = f (Р 2) подобна механической характеристике (рис.4).
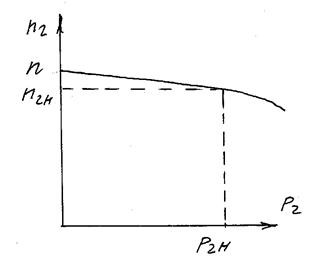
Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода М 0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу Р 2.
Таким образом, можно считать, что М ≈  . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n 2 уменьшается при увеличении Р 2, в связи с этим характеристика М = f (Р 2) нелинейна и вращающий момент М быстро нарастает с увеличением Р 2 (рис.5).
. Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n 2 уменьшается при увеличении Р 2, в связи с этим характеристика М = f (Р 2) нелинейна и вращающий момент М быстро нарастает с увеличением Р 2 (рис.5).
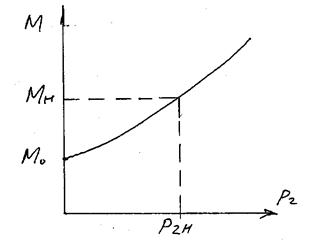
Рис.5. Зависимость М = f (Р 2)
Кривая I 1ф = f (Р 2) подобна рабочей характеристике М = f (Р 2) (рис.6).
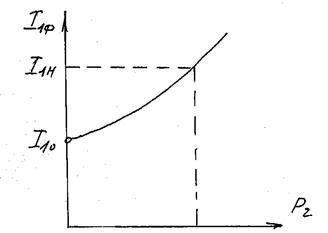
Рис.5. Зависимость I 1ф = f (Р 2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I 1ф, то ток в фазе статора пропорционален полезной мощности Р 2 и увеличивается при ее повышении. При холостом ходе Р 2 = 0 и I 1ф = I 10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу Р 2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность Р 1, потребляемая из сети, увеличивается, а реактивная мощность Q 1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных Cos φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
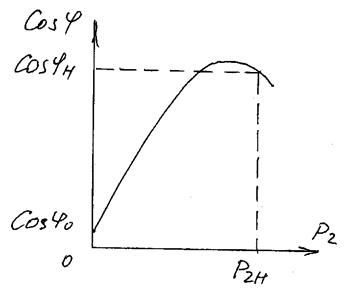
Рис.6. Зависимость Cos φ = f (Р 2)
Анализируя зависимость η = f (Р 2), можно видеть, что при изменении нагрузки на валу Р 2 постоянные потери Δ Р тр и Δ Р ст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток Δ Р э значительно меньше роста полезной мощности на валу. При Р 2 = Р 2н постоянные потери Δ Р тр и Δ Р ст становятся равными переменным Δ Р э, а доля потерь в энергетическом балансе уже становится соизмеримой с Р 2. Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
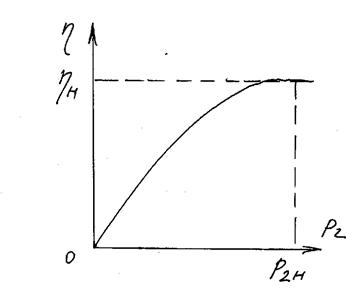
Рис.7. Зависимость η = f (Р 2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. 8) и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U 1ф по вольтметру V, ток в фазе I 1ф по амперметру А1, потребляемую фазой двигателя активную мощность P 1ф по ваттметру W, частоту вращения ротора n по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
Таблица 2
| № п/п | Измеренные величины | Вычисленные величины | ||||||||||
| М Нм | U 1ф В | I 1ф А | P 1ф Вт | n 2 об/мин | Cos φ | М Нм | P 2 Вт | P 1 Вт | S 1 ВА | Cos φ | s | |
| … | ||||||||||||
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М, Нм; полезную мощность на валу P 2, Вт; активную мощность, потребляемую двигателем P 1, Вт; полную мощность, потребляемую двигателем S 1; скольжение s; коэффициент мощности Cos φ и коэффициент полезного действия η.
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n 2 = f (M);
б) рабочие характеристики s = f (Р 2); n 2 = f (Р 2); M = f (Р 2); I 1ф = f (Р 2).
в) рабочую характеристику Cos φ = f (Р 2), измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные характеристики оформить в виде отчета по лабораторной работе.
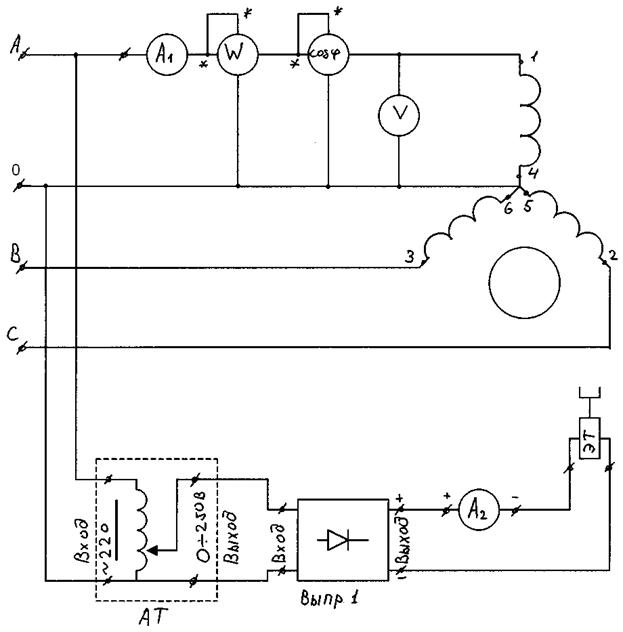
Рис. 8. Электрическая схема исследования трехфазного асинхронного двигателя с короткозамкнутым ротором:
А1 – амперметр переменного тока на 1 А; А2 – амперметр постоянного тока на 1 А; W – ваттметр на 150 Вт; Ф – фазометр на 127 В 5 А в положении «приемник»; V – вольтметр переменного тока на 150 В; АТ – автотрансформатор; ЭТ – электромагнитный тормоз.
Контрольные вопросы
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение (s хх, s пуск)?
3. Почему двигатель называется асинхронным?
4. Условие возникновения вращающегося магнитного поля.
5. Стандартные величины n 1 (частота вращения магнитного
поля).
6. Режим холостого хода асинхронного двигателя.
7. Почему I xx асинхронного двигателя больше чем I 0 трансформатора.
8. Схема замещения асинхронного двигателя в режиме холостого хода.
9. Упрощенная схема замещения.
10.Почему I пуск асинхронного двигателя в 6…8 раз больше I н?
11.Механическая характеристика асинхронного двигателя n = f (M); n = f (s) (естественная и реостатная).
12.Формула Клосса.
13.Регулирование числа оборотов асинхронного двигателя.
14.Достоинства и недостатки каждого метода.
15.Типы роторов (короткозамкнутый и фазный).
16.Предназначение фазного ротора.
17.Метод ограничения I пуск у асинхронного двигателя с короткозамкнутым ротором.
18. Метод ограничения I пуск у асинхронного двигателя с фазным ротором.
19.Энергетическая диаграмма. Потери мощности в асинхронном двигателе.
20.КПД асинхронного двигателя.
21.Достоинства и недостатки асинхронного двигателя.
| <== предыдущая | | | следующая ==> |
| Теорема Коуза | | |
Date: 2015-05-09; view: 855; Нарушение авторских прав