Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Тема 6. Шаговые двигатели
|
|
6.1. Область применения и особенности шаговых двигателей
На современном этапе электронные вычислительные машины проникают во все сферы управления (например электроприводами). Электродвигатели, которые до сих пор рассматривались, могут использоваться в качестве исполнительных элементов автоматизированного привода. Управление ими заключается в изменении амплитуды, фазы или частоты напряжения. Такое управление обычно называют аналоговым.
Современные ЭВМ вырабатывают сигнал управления в цифровом виде, т. е. в виде последовательности импульсов. В этом случае для управления двигателем нужен цифроаналоговый преобразователь, являющийся сложным электронным прибором. Если привод должен отрабатывать не частоту вращения, а заданный угол или перемещение, систему управления делают замкнутой и устанавливают в ней датчики положения объекта управления (рис. 6.1).

Рис. 6.1. Схема замкнутого привода при аналоговом управлении
Без цифроаналоговых преобразований и датчиков обратной связи позволяют обойтись шаговые двигатели.
Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи. Их выпускают мощностью от единиц микроватта до киловатта (микродвигатели), но используют и двигатели малой мощности. В качестве шаговых используют двигатели, имеющие не менее двух устойчивых угловых положений ротора в пределах оборота.
Шаговые микродвигатели (ШД) работают в комплекте с электронными коммутаторами, переключающими обмотки управления с последовательностью и частотой, соответствующими заданной команде. При этом результирующий угол поворота строго соответствует числу переключений обмоток управления, направление поворота – порядку переключений, а частота вращения – частоте переключений. Это позволяет легко регулировать скорость вращения ротора и его пространственное положение за счёт изменения управляющих кодов.

Рис. 6.2. Схема разомкнутого дискретного привода
Напряжение питания обмотки управления шагового двигателя представляет собой последовательность однополярных или разнополярных прямоугольных импульсов, поступающих от коммутатора. Шаговые двигатели можно подразделить на три основные конструктивные группы: с постоянными магнитами (активного типа), реактивные и индукторные.
Разомкнутый привод работает надёжно только с относительно постоянной нагрузкой и при малом ускорении. Современные конструкции ШД позволяют делать до 200 шагов в секунду без потери шага при внезапных остановках и пусках. Однако если нагрузка шагового двигателя превысит допустимый момент, то информация о положении ротора теряется.
В случае если потеря шагов в процессе работы не допустима, система требует базирования с помощью, например, концевого выключателя. Системы с датчиком обратной связи могут работать с большими ускорениями и даже при переменном характере нагрузки. В приводе с ШД можно использовать датчики обратной связи дискретного типа (импульсные или кодовые).
Рис. 6.3. Схема замкнутого дискретного привода
Таким образом, главными достоинствами приводов с шаговыми двигателями являются:
- Высокая точность управления при разомкнутом управлении. Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Современные шаговые двигатели имеют точность 3-5% от величины шага, причём ошибка не накапливается от шага к шагу.
- Высокая надежность, связанная с отсутствием щеток. Срок службы шагового двигателя фактически определяется сроком службы подшипников
- Малые размеры и стоимость (в среднем шаговый привод в 1,5-2 раза дешевле сервопривода с ДПТ).
- Использование в замкнутом приводе датчиков обратной связи дискретного типа.
- Удобство управления приводами от цифровой ЭВМ (компьютер или контроллер) без дорогих ЦАП и АЦП.
- Лёгкость управления положением и регулирования скорости, а также возможность быстрого старта/остановки/реверсирования. Скорость вращения пропорциональна частоте входных импульсов, потому может быть перекрыт довольно большой диапазон скоростей.
- Возможность фиксации перемещений без дополнительных технических средств. Двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны), что позволяет обходиться без механических тормозных систем.
- Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора. Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения.
Однако шаговые двигатели имеют некоторые недостатки. Например, момент существенно падает при увеличении скорости вращения, вследствие чего затруднена работа на высоких скоростях. Кроме того, дискретность шага создаёт существенные вибрации, которые могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Также к недостаткам можно отнести:
- возможность потери контроля положения в случае работы без обратной связи;
- потребление энергии не уменьшается даже без нагрузки (в случае подачи питания на обмотки с целью фиксации перемещений);
- невысокая удельная мощность;
- относительно сложная схема управления.
Дискретные приводы используются в самых разнообразных устройствах: в дисководах, принтерах, плоттерах, сканерах, факсах. Шаговый привод наилучшим образом подходит для автоматизации отдельных узлов и систем, где требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы. Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в системах числового программного управления металлорежущими станками, в лентопротяжных механизмах, в исполнительных устройствах управления задвижками и вентилями на трубопроводах и т.д.
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об).
6.2. Конструкция и принцип действия шаговых двигателей активного типа
Шаговые двигатели активного типа (рис. 6.4) в отличие от синхронных микродвигателей непрерывного вращения имеют на статоре явно выраженные полюсы, на которых располагают катушки обмоток управления. Число пар полюсов каждой из обмоток управления р равно числу пар полюсов ротора.
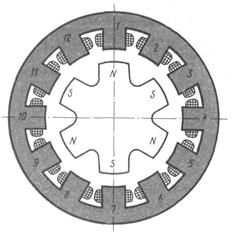
Рис. 6.4. Схема конструкции шагового двигателя с постоянными магнитами на роторе
Приведенный на рисунке ШД имеет две обмотки управления и три пары полюсов. Катушки, расположенные на нечетных полюсах 1, 3,... 11, соединены последовательно, образуя одну обмотку управления. Катушки, расположенные на четных полюсах 2, 4,..., 12, образуют вторую обмотку управления, сдвинутую относительно первой на угол 90°/ р. При подаче напряжения на любую из обмоток управления, входящие в ее состав полюсы намагничиваются поочередно: N, S, N, S, N, S. Ротор у ШД активного типа представляет собой постоянный магнит, выполненный в виде «звездочки».
Принцип действия шагового микродвигателя рассмотрим на примере двухфазного двигателя. На рис. 6.5, а показана схема подключения обмоток управления 1 и 2 к коммутатору К. Точками обозначены начала обмоток. На рис. 6.5, б изображена временная диаграмма силовых импульсов напряжения на обмотках управления двигателя при восьмитактной (I – VIII), разнополярной и несимметричной системе коммутации. Несимметричной ее называют в том случае, если нечетным и четным тактам соответствует возбуждение различного числа обмоток управления. В нашем примере это одна или две обмотки. Систему коммутации называют симметричной, если на всех тактах возбуждается одинаковое число обмоток управления.
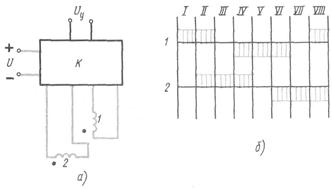
Рис. 6.5. Схема включения обмоток управления ШД (а) и временная диаграмма импульсов (б) напряжения на обмотках. U – напряжение питания, Uу – импульсный сигнал управления.
Переход от одного такта к другому соответствует поступлению на коммутатор очередного импульсного сигнала управления. При этом, как видно из рис. 6.5, б, скачкообразно изменяется значение или полярность напряжения на обмотках управления. Рассмотрим более подробно, что происходит в эти моменты времени в двигателе на примере двухфазной двухполюсной модели (рис. 6.6).
Во время такта I положительный импульс тока возбуждает обмотку управления 1 (рис. 6.6, а). Магнитный поток статора направлен по оси этой обмотки. Ротор (внутренний постоянный магнит NS) притягивается к полюсам обмотки 1 и занимает положение вдоль ее оси. При переходе к такту II дополнительно возбуждаются полюсы обмотки управления 2 (рис. 6.6, б). Результирующий поток статора Фс, создаваемый теперь двумя обмотками, скачком поворачивается на 45°. Возникает синхронизирующий момент синхронного двигателя и ротор поворачивается на тот же угол. При переходе к такту III остается возбужденной только обмотка 2 (рис. 6.6, в). Поток статора и ротор поворачиваются еще на один шаг, равный 45°. Положение потока статора и ротора на всех восьми тактах показано на рис. 6.6, г.
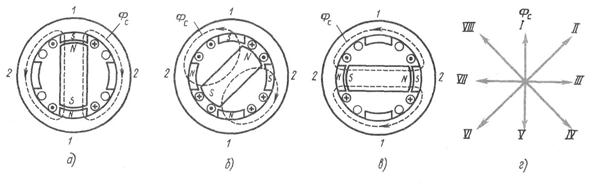
Рис. 6.6. Принцип действия ШД активного типа
Следует обратить внимание на то, что значение потока статора Фс на нечетных и четных тактах различное. Это объясняется тем, что он создается то одной, то двумя обмотками управления, в результате этого изменяется синхронизирующий момент от такта к такту. Это является недостатком несимметричной системы коммутации.
На рис. 6.7, а изображены схемы включения обмоток управления, временная диаграмма импульсов напряжения на обмотках и пространственная диаграмма положений результирующего потока статора Фс для симметричной разнополярной схемы коммутации двухфазного ШД. При сравнении диаграммы положений штока на этом рисунке с диаграммой (см. рис. 6.6, г) видно, что при симметричной коммутации шаг ротора увеличивается вдвое, но результирующий поток статора на всех тактах одинаков.
На рис. 6.7, б изображены схемы включения и диаграммы для симметричной однополярной схемы коммутации четырехфазного ШД. Сравнение диаграмм показывает, что применение разнополярной коммутации может влиять на шаг равносильно удвоению обмоток управления при однополярной коммутации.
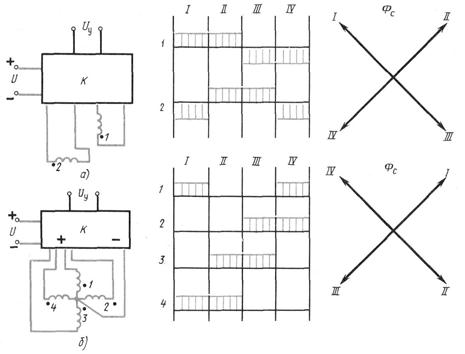
Рис. 6.7. Схемы включения обмоток управления ШД, временные диаграммы импульсов напряжения и пространственные диаграммы положения потока статора при симметричных системах коммутации:
а – разнополярной, б – однополярной; U – напряжение питания; U у – импульсный сигнал управления, К – коммутатор
Количество состояний коммутатора, обеспечивающих новое угловое положение результирующего магнитного потока статора Фс в пределах 360°, называется числом тактов k т схемы управления и определяется по формуле
k т = m у k 1 k 2  (6.1)(19)
(6.1)(19)
где k 1 – коэффициент, равный единице при симметричной и двум при несимметричной коммутации; k 2 – коэффициент, равный единице при однополярной и двум – при разнополярной коммутации; m у – число обмоток управления. При этом следует учитывать, что в микродвигателях, имеющих сдвинутые на 180° обмотки управления, применение разнополярной коммутации не имеет смысла.
При переходе от такта к такту ротор делает шаг, т. е. поворачивается на угол, который в двухполюсном ШД равен 360°/ k т. Реальные шаговые микродвигатели являются многополюсными (р> 1). Шаг αш, т. е. угол поворота ротора при воздействии одного сигнала управления и установленной схеме коммутации, уменьшается в р раз
αш=360°/(k тр) (6.2)(20)
Шаговый микродвигатель преобразует импульсную команду в угол дискретно, шагами. Заданный угол отрабатывается с точностью до шага. Следовательно, чем меньше шаг ШД, тем точнее можно отработать угол. Увеличение числа пар полюсов при неизменном диаметре ротора ограничено технологическими возможностями и увеличением потока рассеяния между полюсами (р = 4÷6), а увеличение числа обмоток управления связано с усложнением коммутатора (m у = 2÷4). Поэтому αш активных ШД составляет десятки градусов. Дальнейшее уменьшение шага выполняют с помощью кинематических механизмов.
6.3. Конструкция и принцип действия реактивного и индукторного шаговых двигателей
Шаговые двигатели активного типа обладают всеми достоинствами синхронных двигателей с постоянными магнитами на роторе. Однако у них крупный шаг. Ротор в виде звёздочки из постоянных магнитов по техническим соображениям может быть выполнен с ограниченным числом полюсов 2 p ≤12, тогда как реактивный ротор без обмотки может иметь значительно большее число зубцов.
Реактивные редукторные синхронные двигатели позволяют редуцировать частоту вращения внутри машины. Этот принцип можно использовать для создания шаговых двигателей с малым шагом.
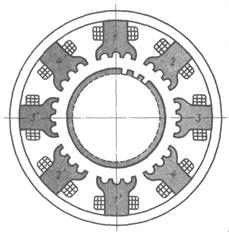
Рис. 6.8. Схема конструкции реактивного редукторного ШД
Рассмотрим конструкцию и принцип действия реактивного редукторного ШД на примере машины с четырьмя обмотками управления (рис. 6.8). Статор и ротор набран из листов электротехнической стали. Поверхности ротора и полюсов статора зубчатые. Зубцовые деления ротора и статора равны. Каждая обмотка управления размещена на двух диаметрально противоположных полюсах статора: первая на 1, 1’; вторая – на 2, 2’, третья – на 3, 3’ и четвертая – на 4, 4’. Оси обмоток сдвинуты в пространстве на 45°.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора. Если зубцы ротора соосны с зубцами одной диаметрально расположенной пары полюсов статора, то относительно каждой из оставшихся трех пар полюсов статора они смещены на  ,
,  и
и  зубцового деления τz – части окружности, занимаемой зубцом и пазом.
зубцового деления τz – части окружности, занимаемой зубцом и пазом.
Пусть на первом такте коммутации возбуждена первая обмотка управления и зубцы ротора соосны с зубцами полюсов 1, 1’ (рис. 6.9, а). Поток статора Фс идет по пути минимального магнитного сопротивления, реактивный момент равен нулю и ротор неподвижен. На втором такте возбуждена вторая обмотка управление (рис. 6.9, б). Поток статора поворачивается на 45°. Магнитные силовые линии деформируются и появляется активный момент М р, под действием которого ротор поворачивается на угол, соответствующий зубцового деления (рис. 6.9, в). При этом зубцы ротора встанут против зубцов полюсов статора 2, 2’ и реактивный момент cнова станет равным нулю. На последующих тактах процесс повторяется. При большом числе зубцов ротора z р его угол поворота значительно меньше угла поворота поля статора.
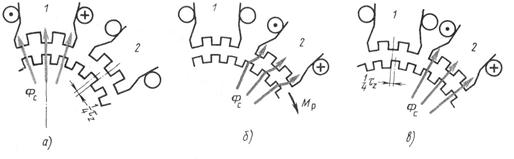
Рис. 6.9. Принцип действия реактивного редукторного ШД:
а – исходное положение устойчивого равновесия, б – промежуточное положение, в – положение устойчивого равновесия, сдвинутое на шаг
В общем случае указанное смещение осей зубцов полюсов статора производится на угол 360°/(m у z р). За полный цикл коммутации ротор поворачивается на одно зубцовое деление 360°/zр, шаг определяется по формуле
 (6.3)(21)
(6.3)(21)
Следует помнить, что в реактивном микродвигателе изменение направления поля на 180° не влияет на состояние ротора и при вычислении k т в выражении (6.1) необходимо брать k 2 = 1 при однополярной и разнополярной коммутации.
Сравнение выражений (6.2) и (6.3) показывает, что при одинаковом числе полюсных выступов на роторе шаг активного двигателя в 2 раза меньше шага активного. Кроме того, при одинаковом диаметре ротора в соответствии с технологическими особенностями у реактивного ШД можно выполнять значительно больше зубов, чем полюсов постоянных магнитов у ШД активного типа. Поэтому у реактивного ШД шаг достигает нескольких градусов или долей градуса.
Индукторные ШД отличаются от реактивных тем, что в них применяется подмагничивание ротора (электромагнитное или постоянными магнитами). Постоянный поток подмагничивания возбуждается со стороны статора или ротора.
На рис. 6.10 показана конструктивная схема двухпакетного индукторного ШД с четырьмя обмотками управления. В корпусе 2 расположены два магнитопровода статора 3 с общими обмотками управления 4. Два магнитопровода ротора 6, насаженные на общий вал 5, подмагничиваются постоянным магнитом 1, имеющим осевую намагниченность.
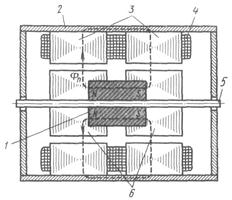
Рис. 6.10. Схема конструкции двухпакетного индукторного ШД
Конструкция правого и левого комплектов магнитопроводов статора и ротора не отличается от конструкции реактивного редукторного ШД, показанного на рис. 6.8. При этом магнитопроводы ротора 4 посажены на вал со сдвигом по углу на  зубцового деления. В результате этого магнитное сопротивление потоку подмагничивания Фп не зависит от углового положения ротора.
зубцового деления. В результате этого магнитное сопротивление потоку подмагничивания Фп не зависит от углового положения ротора.
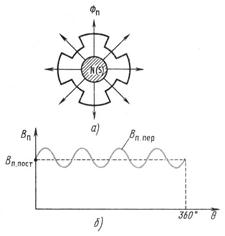
Рис. 6.11. Направление потока подмагничивания (а) и возникновение переменной составляющей индукции (б) в индукторном ШД
Поток подмагничивания Фп вдоль всей окружности ротора имеет одинаковое направление: в левом комплекте – от ротора к статору, в правом – от статора к ротору. Это наглядно видно на рис. 6.11, а, представляющем собой поперечный разрез левого магнитопровода ротора. Для упрощения принято, что на роторе четыре зубца, а в реальных двигателях их значительно больше (несколько десятков).
Поскольку поверхности статора и ротора зубчатые, магнитное сопротивление потоку Фп в разных точках окружности ротора разное. Следовательно, индукция В п потока подмагничивания зависит от угла θ, отсчитываемого вдоль окружности (рис. 6.11, б).
Индукцию В п можно представить в виде двух составляющих: постоянной В п.пост и переменной В п.пер. Результирующий момент постоянной составляющей равен нулю.Переменная составляющая В п.пер превращает магнитопровод ротора в некоторый эквивалентный постоянный магнит числом пар полюсов, равным числу зубцов ротора z р.
Процесс возникновения электромагнитного момента, обусловленного взаимодействием переменной составляющей потока подмагничивания токами обмоток управления статора, такой же, как в активных двигателях.
Шаг индукторного ШД, как и реактивного, определяется формулой (6.3). По сравнению с реактивными ШД при одинаковом шаге у индукторных двигателей увеличивается синхронизирующий момент, улучшаются энергетические и динамические характеристики.
6.4. Режимы работы и характеристики шаговых двигателей
Режимы работы и характеристики шаговых двигателей рассматриваются в данном разделе на примере ШД с постоянными магнитами. Однако основные положения справедливы для реактивных и индукторных ШД.
Шаговый двигатель работает устойчиво, если в процессе отработки угла не происходит потери шагов. Это значит, что ротор занимает устойчивое положение по отношению к вектору результирующего потока статора при каждом шаге вектора потока. Режим работы ШД в значительной степени определяется частотой управляющих импульсов f.
Статический режим (f = 0) соответствует прохождению постоянного тока по обмоткам управления, создающим неподвижное магнитное поле.
Режим отработки единичных шагов соответствует частоте управляющих импульсов, при которой переходный процесс, чаще всего колебательный, на каждом шаге заканчивается к началу следующего шага. Это значит, что угловая скорость ротора в начале каждого шага равна нулю (рис. 6.12).
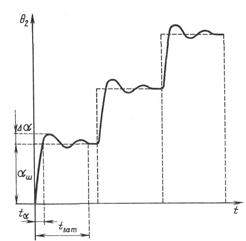
Рис. 6.12. Процесс отработки шагов ШД
В момент времени t α ротор переместится на один шаг: угол поворота ротора θ2 = αш. Однако он имеет максимальные угловую скорость и кинетическую энергию и продолжает перемещаться против сил поля. В результате этого начинается процесс свободных колебаний ротора относительно положения устойчивого равновесия, подобный колебаниям маятника. Колебания затухают, когда вся кинетическая энергия израсходована на электрические, магнитные и механические потери, вызванные этим процессом. Амплитуда Δα и время затухания t зат колебаний тем меньше, чем больше эти потери.
Установившийся режим работы шаговых двигателей соответствует постоянной частоте управляющих импульсов, причем t зат больше времени одного такта коммутации.
В установившемся режиме вращение роторов происходит со средней частотой п (об/мин), которую можно определить следующим образом. За 1 с ротор поворачивается на угол f αш, за 1 мин – на угол 60 f αш (град). Значит, частота вращения
 (6.4)(23)
(6.4)(23)
Непрерывное вращение сопровождается вынужденными колебаниями относительно мгновенной точки устойчивого равновесия, амплитуда которых достигает наибольшего значения при частоте управляющих импульсов, совпадающей с резонансной (собственной) частотой ротора.
Внутреннее электромагнитное демпфирование колебаний ротора обеспечивается за счет наведения со стороны ротора ЭДС вращения в обмотках управления статора, вызывающей в цепи дополнительные токи. Токи взаимодействуют с вызвавшим их потоком и создают демпфирующий момент, препятствующий колебаниям мгновенной угловой скорости ротора относительно средней.
Переходные режимы (пуск, торможение, реверс, переход с одной частоты на другую) сопровождаются переходными процессами в ШД, вызванными изменением частоты управляющих импульсов и частоты вращения ротора.
Скачкообразное увеличение частоты управляющих импульсов при пуске от нуля до рабочей приводит к тому, что вначале ротор отстает от потока статора под действием момента инерции вращающихся частей. По мере ускорения он достигает частоты вращения потока статора и за счет запасенной кинетической энергии может опередить поток. Постепенно колебания затухают, и двигатель переходит в установившийся режим. Таким образом, в процессе пуска ротор может отставать от потока статора на шаг и более, в результате этого возникает расхождение между числом шагов ротора и потока статора.
При торможении и реверсе ШД также имеются предельные значения перепада частот, при которых обеспечивается переходный процесс без сбоя шага.
Основными характеристиками шаговых двигателей являются шаг, угловая характеристика, предельная механическая характеристика и приемистость. Поскольку шаг ШД рассматривался в предыдущих параграфах, остановимся на остальных характеристиках.
Угловая характеристика – это зависимость статического синхронизирующего момента М с от угла поворота ротора θ2 при фиксированном положении потока статора.
На основании выражения (3.5) для синхронного двигателя можно записать
 (6.5)(24)
(6.5)(24)
где M с max–максимальный синхронизирующий момент; θ1, θ2 – углы поворота потока статора и оси ротора; р – число пар полюсов.
В дальнейшем для упрощения угловые характеристики будут рассматриваться на примере двухполюсного ШД (р =1). При этом реальные угловые величины можно получить из расчетных делением на реальное число пар полюсов р.
На рис. 6.13 сплошной линией показана угловая характеристика ШД, построенная по формуле (6.5) при фиксированном положении потока статора θ1=0. Точка О на характеристике – точка устойчивого равновесия, А и В – неустойчивого равновесия ШД при нулевом моменте сопротивления. Если статический момент сопротивления движению ротора ШД отличен от нуля, например равен М cт, точка устойчивого равновесия O 1, неустойчивого равновесия – А 1 и В 1. Пунктирной кривой на этом же рисунке показана угловая характеристика после поворота поля статора на один шаг.
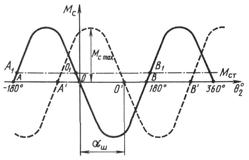
Рис. 6.13. Угловые характеристики ШД
Предельная механическая характеристика – это зависимость максимального синхронизирующего момента ШД от частоты управляющих импульсов (рис. 6.14, а).
Иными словами, эта характеристика определяет тот предел, до которого при данной частоте управляющих импульсов можно плавно нагружать вал ШД, сохраняя при этом синхронный режим. Предельную механическую характеристику рассматривают обычно при частотах, больших резонансной частоты f 0.
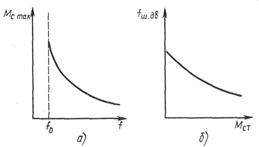
Рис. 6.14. Предельные механическая (а) и динамическая (б) характеристики ШД
С увеличением частоты происходит уменьшение вращающего момента ШД. Это объясняется в основном двумя факторами: во-первых, действием демпфирующего момента от ЭДС вращения, во-вторых, тем, что ЭДС самоиндукции в обмотках управления становится соизмеримой с напряжением источника питания. При этом ток в обмотках управления за время такта не успевает нарастать до установившегося значения, что снижает результирующий поток статора.
Приемистость f ш.дв – это наибольшая частота управляющих импульсов, отрабатываемых шаговым электродвигателем без потери или добавления шагов при пуске или останове. Она является основным показателем переходного режима ШД. Приемистость растет с увеличение синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся частей и статического момента сопротивления (рис. 6.14, б, где М ст – момент сопротивления типа трения).
Контрольные вопросы
- Какие синхронные машины используют в качестве шаговых?
- В чем отличие работы шагового двигателя от работы других синхронных двигателей?
- Что такое линейный шаговый двигатель?
- От чего зависит шаг шаговых двигателей?
- Что такое предельная механическая характеристика шагового двигателя?
- Что такое приемистость шагового двигателя и от чего она зависит?
| <== предыдущая | | | следующая ==> |
| Учет операций по экспорту товаров, работ, услуг при условии прямого выхода предприятия на внешний рынок | | |
Date: 2015-05-09; view: 1305; Нарушение авторских прав