Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Дифференциальные уравнения машины постоянного тока
|
|
Двигатель параллельного возбуждения (рис. 2.1, а), В этой машине имеется два контура: контур обмотки возбуждения и контур якоря, состоящий из последовательно соединенных обмоток — компенсационной, добавочных полюсов и якоря. Щетки установлены строго на геометрической 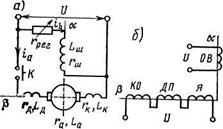 нейтрали.
нейтрали.
Уравнения равновесия напряжений контуров машины
принято записывать в  системе неподвижных координатных осей α,β(рис. 2.1, б). Обмотка вращающегося якоря идеализированной машины постоянного тока заменяется псевдонеподвижной катушкой Я, ось которой направлена по линии щеток (по оси β). Поэтому при записи уравнения равновесия напряжений для контура якоря следует помнить, что в катушке якоря кроме ЭДС само- и взаимоиндукции наводится при вращении якоря в поле главных полюсов ЭДС вращения
системе неподвижных координатных осей α,β(рис. 2.1, б). Обмотка вращающегося якоря идеализированной машины постоянного тока заменяется псевдонеподвижной катушкой Я, ось которой направлена по линии щеток (по оси β). Поэтому при записи уравнения равновесия напряжений для контура якоря следует помнить, что в катушке якоря кроме ЭДС само- и взаимоиндукции наводится при вращении якоря в поле главных полюсов ЭДС вращения
 (2.1)
(2.1)
где  - потокосцепление обмотки возбуждения с обмоткой якоря.
- потокосцепление обмотки возбуждения с обмоткой якоря.
Таким образом, уравнения равновесия напряжений контуров машины постоянного тока, имеют вид
 (2.2)
(2.2)
где U — напряжение, приложенное к зажимам машины;
ib,ia - токи, протекающие по обмоткам;
rb,r - активные сопротивления контуров обмоток возбуждения и якоря, причем
rb=rш+rрег, r=rк+rд+ra (rш, rк,rд,ra - активные сопротивления шунтовой, компенсационной обмоток и обмоток добавочных полюсов и якоря; rрег - регулировочное сопротивление); Ψbш — потокосцепление обмотки параллельного возбуждения; Ψ- полное потокосцепление обмоток контура якоря идеализированной машины.
Потокосцепления обмоток машины постоянного тока параллельного возбуждения


 (2.3)
(2.3)
где Lш — полная индуктивность обмотки параллельного возбуждения; Lк, Lд, La — полные индуктивности обмоток; компенсационной, добавочных полюсов и якоря; Lкд Lкa, Lдa — взаимные индуктивности обмоток: компенсационной и добавочных полюсов, компенсационной и якоря, добавочных полюсов и якоря (знак минус перед коэффициентами Lкa, Lда обусловлен тем, что обмотки добавочных полюсов и компенсационная включены встречно по отношению к обмотке якоря); Lad — взаимная индуктивность обмотки якоря по продольной оси и обмотки возбуждения.
При этом имеется в виду действительная обмотка якоря, а не псевдонеподвижная катушка якоря идеализированной машины, которая не имеет взаимоиндуктивной связи с обмоткой возбуждения, так как их оси сдвинуты на угол π/2.
При исследовании электромеханических переходных процессов частота вращения якоря не постоянная и систему уравнений (2.2) следует дополнить уравнением равновесия моментов (или уравнением движения якоря):
dw/dt=(M-Mc)/J1, (2.4)
где J1 момент инерции на пару полюсов;
Мс – момент сопротивления;
M – электромагнитный момент вращения.
 (2.5)
(2.5)
В общем случае система уравнений (2.3) машины постоянного тока нелинейна, так как содержит следующие нелинейные величины:
а) взаимные и полные индуктивности обмоток машины, являющиеся нелинейными функциями токов обмотки возбуждения и якоря и изменяющиеся в зависимости от насыщения магнитной цепи машины;
б) момент сопротивления, являющийся, как правило, нелинейной функцией частоты вращения якоря.
Даже в том случае, когда изменением насыщения магнитной цепи пренебрегают и считают параметры обмоток постоянными величинами, при исследовании режимов работы, характеризующихся переменной неизвестной частотой вращения, рассматриваемые уравнения будут нелинейны, так как в уравнения (2.2) равновесия напряжений входят произведения переменных. Указанные нелинейности делают решение системы уравнений (2.2), (2.5) в общем виде невозможным. Однако в некоторых частных случаях эту систему можно свести к линейной рядом допущений.
Date: 2015-05-09; view: 875; Нарушение авторских прав