Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Дифференциальные уравнения движения механической системы в обобщенных координатах (уравнение Лагранжа 2-го рода)
Обобщенными координатами qi называются независимые между собой параметры, с помощью которых можно определить положение всех точек механической системы. Число обобщенных координат равно числу степеней свободы S: q1, q2, …,qS. Положение всех точек кривошипно-ползунного механизма (рис. 63) зависит от одного параметра – угла поворота  ведущего звена – кривошипа ОА.
ведущего звена – кривошипа ОА.
|
 ;
;
 ;
;

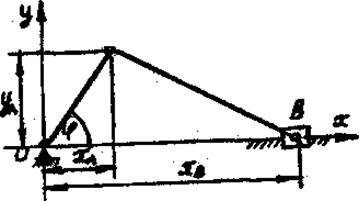 Рисунок 63
Рисунок 63
|
Следовательно, для этого механизма обобщенной координатой является угол . Производная  является обобщенной скоростью. Обобщенные координаты могут быть линейными (S,l,x,y) или угловыми (,
является обобщенной скоростью. Обобщенные координаты могут быть линейными (S,l,x,y) или угловыми (,  ), им будут соответствовать линейные или угловые обобщенные скорости.
), им будут соответствовать линейные или угловые обобщенные скорости.
|
 будут также независимы друг от друга.
будут также независимы друг от друга.
 Рисунок 64
Рисунок 64
|

|
 ,
,
 , (19.1)
………………….
, (19.1)
………………….
Число уравнений в системе (19.1) соответствует числу S степеней свободы. Величина Qi в правой части уравнения Лагранжа называется обобщенной силой. Для определения обобщенной силы системе необходимо дать возможное перемещение по соответствующей координате, вычислить сумму элементарных работ заданных сил на соответствующих перемещениях и разделить на приращение обобщенной координаты, т.е.  . (19.2)
. (19.2)
Если все силы, действующие на систему, являются потенциальными, то обобщенную силу можно вычислить по формуле  , (19.3) где П—потенциальная энергия системы.
, (19.3) где П—потенциальная энергия системы.
Если все обобщенные силы равны нулю, механическая система будет находиться в равновесии. Уравнения Лагранжа дают единый и достаточно простой метод решения задач динамики. Число уравнений не зависит от числа точек или тел, входящих в систему, и определяется числом степеней свободы. В уравнениях Лагранжа учитываются только активные силы, силы инерции и реакции связей в него не входят.
Решение задач с использованием уравнений Лагранжа нужно проводить в такой последовательности:
1. определить число степеней свободы механической системы;
2. выбрать систему координат и ввести независимые обобщенные координаты по числу степеней свободы системы; оси координат направить таким образом, чтобы при движении системы приращения обобщенных координат были положительными;
3. вычислить кинетическую энергию системы, выразив все переменные величины, входящие в формулу энергии, через обобщенные координаты и обобщенные скорости, т.е.  .
.
4. определить частные производные  ,
,  ;
;
5. определить производные  , считая, что все переменные, входящие в частную производную
, считая, что все переменные, входящие в частную производную  , являются функциями времени;
, являются функциями времени;
6. вычислить обобщенные силы, для чего
· изобразить все активные силы и реакции неидеальных связей, действующих на систему;
· дать независимые возможные перемещения по каждой обобщенной координате;
· вычислить сумму работ всех активных сил и реакций неидеальных связей на каждом возможном перемещении  , при этом все остальные возможные перемещения по остальным обобщенным координатам будут равны нулю;
, при этом все остальные возможные перемещения по остальным обобщенным координатам будут равны нулю;
· тогда обобщенная сила  ;
;
7. подставить все найденные величины в уравнение Лагранжа;
8. решить уравнение Лагранжа в соответствии с условиями задачи.
ПРИМЕР 28.
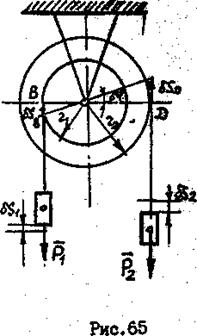
Барабаны радиусов r1 и r2, соединены между собой жестко, могут вращаться вокруг общей горизонтальной оси (рис. 65). На барабаны намотаны нерастяжимые нити, к концам которых подвешены груз А весом  и груз В весом
и груз В весом  . Система движется под действием сил тяжести грузов. Определить угловое ускорение блока.
. Система движется под действием сил тяжести грузов. Определить угловое ускорение блока.
РЕШЕНИЕ.
1. Система имеет одну степень свободы: S=1. Принимаем за обобщенную координату угол поворота блоков вокруг горизонтальной оси, считая, что P1>P2.
2. запишем уравнение Лагранжа 2-го рода с учетом выбранной обобщенной
|
|
 . (1)
3. Определим кинетическую энергию системы как сумму кинетических энергий грузов 1и 2:
Т=Т1+Т2. (2) Кинетическую энергию каждого груза выразим через обобщенную скорость
. (1)
3. Определим кинетическую энергию системы как сумму кинетических энергий грузов 1и 2:
Т=Т1+Т2. (2) Кинетическую энергию каждого груза выразим через обобщенную скорость  ;
;
 ;
;
 .
.
Вычислим производные:  ;
;  ;
;
 .
.
4. Дадим системе возможное перемещение по обобщенной координате  и вычислим сумму работ активных сил и на соответствующих перемещениях
и вычислим сумму работ активных сил и на соответствующих перемещениях  и
и  .
.
 .
.
Перемещения и выразим через :
 ;
;
 , тогда
, тогда  . Вычисляем обобщенную силу
. Вычисляем обобщенную силу  . (3) Подставим в уравнение (1) выражение (2) и (3):
. (3) Подставим в уравнение (1) выражение (2) и (3):  , откуда определим угловое ускорение блока
, откуда определим угловое ускорение блока  .
.
ПРИМЕР 29.
Механическая система состоит из тел 1, 2, 3 весом , ,  соответственно, связанных друг с другом нитями, намотанными на ступенчатые блоки 1 и 2 (рис.66). Радиусы ступенчатых блоков 1 и 2 равны соответственно R1=R, r1=0,4R1, R2=R, r2=0,8R. При вычислении моментов инерции блоки считать однородными сплошными цилиндрами радиуса R. На систему кроме сил тяжести действует пара сил с моментом М1=2РR, на участке АВ включена пружина с коэффициентом жесткости с, в начальный момент времени пружина не деформирована.
соответственно, связанных друг с другом нитями, намотанными на ступенчатые блоки 1 и 2 (рис.66). Радиусы ступенчатых блоков 1 и 2 равны соответственно R1=R, r1=0,4R1, R2=R, r2=0,8R. При вычислении моментов инерции блоки считать однородными сплошными цилиндрами радиуса R. На систему кроме сил тяжести действует пара сил с моментом М1=2РR, на участке АВ включена пружина с коэффициентом жесткости с, в начальный момент времени пружина не деформирована.
составить для системы уравнение Лагранжа и найти закон изменения обобщенной координаты х, т.е. х=f(t); считая, что движение начинается из состояния покоя, определить частоту и период колебаний, совершаемых телами системы при ее движении.
РЕШЕНИЕ.
 Рисунок 66
Рисунок 66
|
1. Рассматриваемая система имеет две степени свободы: S=2. Принимаем за обобщенные координаты угол поворота невесомого блока 1 и линейную координату х --удлинение пружины. Тогда уравнения Лагранжа для системы будут иметь вид:
|
 ; (1)
; (1)
 .
.
2. Определим кинетическую энергию системы как сумму кинетических энергий блока 2 и тележки 3: Т=Т1+Т3. (2) Блок 2 совершает вращательное движение вокруг неподвижной горизонтальной оси. Угловую скорость блок выразим через обобщенную координату :
 .
.
Момент инерции блок а2:  , тогда
, тогда
 . (3) Движение тележки 4 зависит от изменения обобщенных координат и х. Тележка совершает поступательное движение
. (3) Движение тележки 4 зависит от изменения обобщенных координат и х. Тележка совершает поступательное движение
 .
.
Для определения скорости V3 рассмотрим движение тележки как сложное, состоящее из относительного движения со скоростью  и переносного движения со скоростью
и переносного движения со скоростью  ;
;
 ;
;
 ;
;
 . (4) Подставим значения Т2 и Т3 из (3) и (4) в равенство (2):
. (4) Подставим значения Т2 и Т3 из (3) и (4) в равенство (2):
 . (5)
. (5)
3. Дадим системе возможное перемещение по обобщенной координате :  ,
,  .
.
Вычислим производные:  ;
;
 ;
;
 . (6) Вычислим сумму элементарных работ активных сил на возможном перемещении. На перемещении элементарную работу совершит момент М.
. (6) Вычислим сумму элементарных работ активных сил на возможном перемещении. На перемещении элементарную работу совершит момент М.  , тогда обобщенную силу можно определить по формуле:
, тогда обобщенную силу можно определить по формуле:
 . (7) Так как обобщенная координата угловая, обобщенная сила является моментом. Составим первое уравнение Лагранжа:
. (7) Так как обобщенная координата угловая, обобщенная сила является моментом. Составим первое уравнение Лагранжа:  . (8) Учитывая, что по условию задачи М=2РR, получаем
. (8) Учитывая, что по условию задачи М=2РR, получаем  . (9)
. (9)
4. Дадим системе возможное перемещение по обобщенной координате х:  ,
,  . Вычисли производные:
. Вычисли производные:  ;
;
 ;
;
 . (10) На возможном перемещении элементарную работу совершит сила упругости F=cx.
. (10) На возможном перемещении элементарную работу совершит сила упругости F=cx.  .
.
Вычислим обобщенную силу:  . (11) Составим второе уравнение Лагранжа
. (11) Составим второе уравнение Лагранжа  . (12) Таким образом, движение механической системы можно описать двумя дифференциальными уравнениями:
. (12) Таким образом, движение механической системы можно описать двумя дифференциальными уравнениями:
|
 ; (13)
; (13)
 . (14)
. (14)
Из уравнения (13) выразим  и, подставив в (14), получим
и, подставив в (14), получим
 или
или
 , (15) где
, (15) где  ;
;  . Общее решение неоднородного дифференциального уравнения (15) имеет вид: х=х1+х2, где х1—общее решение однородного уравнения
. Общее решение неоднородного дифференциального уравнения (15) имеет вид: х=х1+х2, где х1—общее решение однородного уравнения  , т.е.
, т.е.  ; х2—частное решение уравнения (15) будем иметь в виде х2=В=const. Подставляя решение х2 в уравнение (15), получаем
; х2—частное решение уравнения (15) будем иметь в виде х2=В=const. Подставляя решение х2 в уравнение (15), получаем  , тогда
, тогда
 . (16) Постоянные интегрирования С1 и С2 определим из начальных условий,
. (16) Постоянные интегрирования С1 и С2 определим из начальных условий,  ,
,  , продифференцировав равенство (16) по времени:
, продифференцировав равенство (16) по времени:
 . (17) При t=0
. (17) При t=0  ; 0=kC2. Следовательно
; 0=kC2. Следовательно  , С2=0. Окончательно получим искомую зависимость x=f(t) в виде:
, С2=0. Окончательно получим искомую зависимость x=f(t) в виде:
 . (18) Таким образом, тележка совершает колебания согласно уравнению (18). Круговая частота этих колебаний
. (18) Таким образом, тележка совершает колебания согласно уравнению (18). Круговая частота этих колебаний  . Период колебаний
. Период колебаний  .
.
Date: 2015-09-24; view: 1989; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |