Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Уравнения кинематики манипулятора
Лекция 6
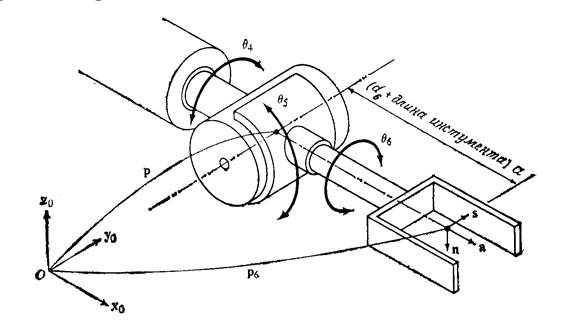
Рисунок 6.1. Система координат схватa
Однородная матрица  , определяющая положение i -й системы координат относительно базовой системы координат, представляет собой произведение последовательности однородных матриц преобразования i-1Ai и имеет вид:
, определяющая положение i -й системы координат относительно базовой системы координат, представляет собой произведение последовательности однородных матриц преобразования i-1Ai и имеет вид:
0 T i = 0A i 1A i …i-1A i =  =
=  =
=  для i =1, 2, …, n,
для i =1, 2, …, n,
где  - матрица, определяющая ориентацию i -й системы координат, связанной с i -м звеном, по отношению к базовой системе координат. Это верхняя левая подматрица
- матрица, определяющая ориентацию i -й системы координат, связанной с i -м звеном, по отношению к базовой системе координат. Это верхняя левая подматрица  , имеющая размерность 3×3.
, имеющая размерность 3×3.
р i - вектор, соединяющий начало базовой системы координат с началом i -й системы координат. Это верхняя правая подматрица матрицы , имеющая размерность 3×1. В частности, при i =6 мы получаем матрицу  , которая задает положение и ориентацию схвата манипулятора относительно базовой системы координат. Эта матрица часто используется при описании кинематики манипулятора. Ее называют «матрицей манипулятора».
, которая задает положение и ориентацию схвата манипулятора относительно базовой системы координат. Эта матрица часто используется при описании кинематики манипулятора. Ее называют «матрицей манипулятора».
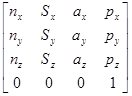
Положим, что матрица Т имеет следующий вид:
T =  =
=  =
=  =
=  ,
,
где n – вектор нормали к схвату. В случае плоскопараллельного движения пальцев этот вектор перпендикулярен пальцам манипулятора;
s – касательный вектор схвата. Он лежит в плоскости движения пальцев и указывает направление движения пальцев во время открытия или закрытия схвата;
a - вектор подхода схвата. Он направлен по нормали к ладони схвата, (т.е. перпендикулярно плоскости крепления инструмента в схвате);
p - вектор положения схвата. Этот вектор направлен из начала базовой системы координат к началу системы координат схвата, которое, как правило, расположено в точке, являющейся геометрическим центром полностью сжатых пальцев.
Если положение манипулятора в абсолютном пространстве определяется матрицей B, а в схвате манипулятора зафиксирован инструмент, положение которого в системе координат схвата определяется матрицей H, то положение рабочего узла инструмента относительно абсолютной системы координат дается произведением матриц В, 0 Т 0 и Н, т.е.:
 . (6-1)
. (6-1)
При этом H ≡  , B ≡
, B ≡  .
.
Решение прямой задачи кинематики для шестизвенного манипулятора является вычислением T =0 A 6 с помощью последовательного перемножения шести матриц i -1 A i . Решение этой задачи приводит к единственной матрице Т при заданных  и фиксированных системах координат, где
и фиксированных системах координат, где  для вращательного сочленения и
для вращательного сочленения и  для поступательного сочленения. Ограничения определяются только физическими пределами изменения
для поступательного сочленения. Ограничения определяются только физическими пределами изменения  для каждого сочленения манипулятора.
для каждого сочленения манипулятора.
Матрица T манипулятора Пума имеет вид:
T = 0 A 11 A 22 A 33 A 44 A 55 A 6=  , (6-2)
, (6-2)
где  ;
;
 ;
;  ; (6-3)
; (6-3)  ;
;
 ;
;
 ; (6-4)
; (6-4)
 ;
;
 ;
;
 ; (6-5)
; (6-5)
 ;
;
 ;
;
 . (6-6)
. (6-6)
Например, при  имеем
имеем
T =  ,
,
что согласуется с выбором системы координат на рис. 5.4.
Из равенств (6-3) – (6-6) видно, что вычисление матрицы манипулятора Т требует обращения к программам вычисления 12 трансцендентных функций, выполнения 40 умножений и 20 сложений в том случае, если производится только вычисление правой подматрицы Т, имеющей размерность 3×3, а вектор n определяется как векторное произведение векторов s и a(n=s×a). Еслиобъединить d6 с длиной рабочего инструмента, то d 6=0, а длина инструмента увеличивается на d6 единиц. Это сокращает объем вычислений до 12 бращений и программ вычисления трансцендентных функций, 35 операций умножения и 16 операций сложения.
Date: 2015-08-15; view: 440; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |