Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Решение для первого сочленения
Проецируя, как показано на рис. 7.1, вектор р на плоскость x 0, y 0, получаем следующие уравнения для определения угла  :
:
 ,
,  , (7-8)
, (7-8)
 ,
,  , (7-9)
, (7-9)
 ,
,  , (7-10)
, (7-10)
 ,
,  , (7-11)
, (7-11)
где индексы L и R означают ЛЕВУЮ и ПРАВУЮ конфигурацию манипулятора.
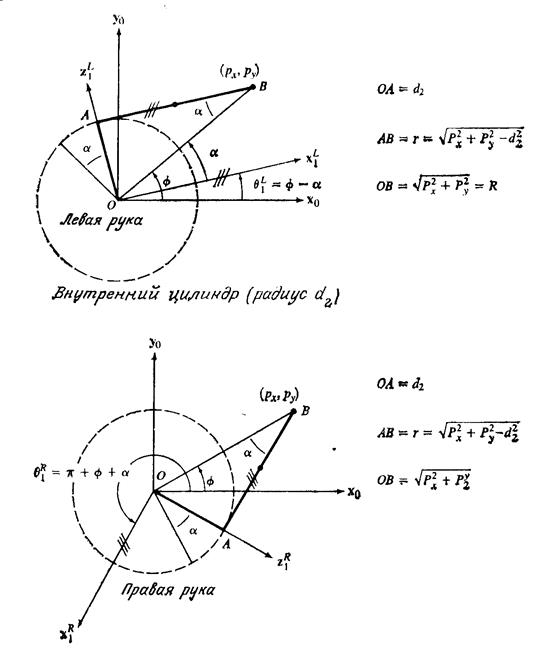
Рисунок 7.1. Решение для 1-го сочленения
Из уравнений (7-8) – (7-11) получаем значения функций синуса и косинуса угла  для ЛЕВОЙ/ПРАВОЙ конфигурации манипулятора:
для ЛЕВОЙ/ПРАВОЙ конфигурации манипулятора:
 , (7-12)
, (7-12)
 , (7-13)
, (7-13)
 , (7-14)
, (7-14)
 . (7-15)
. (7-15)
Объединив равенства (7-12) – (7-15) и используя индикатор РУКА для учета ЛЕВОЙ/ПРАВОЙ конфигурации манипулятора, получаем значения функций синуса и косинуса угла  в следующем виде:
в следующем виде:
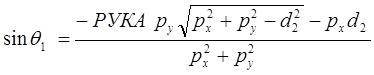 , (7-16)
, (7-16)
 . (7-17)
. (7-17)
В этих равенствах используется положительное значение квадратного корня, а индикатор РУКА определен равенством (7-2). Для вычисления , лежащего в пределах  , воспользуемся функцией арктангенса, определенной равенством (6-13). Из равенств (7-16) и (7-17) с учетом равенства (6-13) получаем следующую формулу для определения :
, воспользуемся функцией арктангенса, определенной равенством (6-13). Из равенств (7-16) и (7-17) с учетом равенства (6-13) получаем следующую формулу для определения :
 . (7-18)
. (7-18)
Date: 2015-08-15; view: 406; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |