Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Выбор закона регулирования и критерия оптимальности процесса регулирования
С помощью отношения (11)определим динамический коэффициент на графике (рисунок 8).
 (11)
(11)
где  время запаздывания;
время запаздывания;
 постоянная времени объекта;
постоянная времени объекта;

 По заданию закон регулирования ПИД (Пропорционально интегральный дифференциальный), типовым переходным процессом регулирования примем процесс с минимальной квадратичной площадью отклонения.
По заданию закон регулирования ПИД (Пропорционально интегральный дифференциальный), типовым переходным процессом регулирования примем процесс с минимальной квадратичной площадью отклонения.

Рисунок 8 – Динамический коэффициент регулирования на статических объектах при процессе с минимальной квадратичной площадью отклонения

По формуле (12) определим динамический коэффициент регулирования  .
.
 (12)
(12)
где  – динамический коэффициент регулирования для статических объектов;
– динамический коэффициент регулирования для статических объектов;
 – максимальное допустимое динамическое отклонение;
– максимальное допустимое динамическое отклонение;
 – коэффициент передачи;
– коэффициент передачи;
 - входная величина
- входная величина
 В формуле (12) нужно определить по формуле (13).
В формуле (12) нужно определить по формуле (13).
 (13)
(13)


Подставив в соотношение (14) значения  и определим подходит ли этот закон регулирования.
и определим подходит ли этот закон регулирования.
 (14)
(14)

Исходя из полученного результата можно судить, что данный закон регулирования подходит.
Следующим шагом будет определение настроек регулятора с помощью формул (15), (16), (17).
 (15)
(15)

 (16)
(16)
 (17)
(17)
По формулам (15), (16), (17) выполним расчёт.
 =
= 


2.2 Расчёт настроек регулятора графо-аналитическим методом
Для того чтобы определить настройки регулятора графо-аналитическим методом обратимся к рисунку 9.
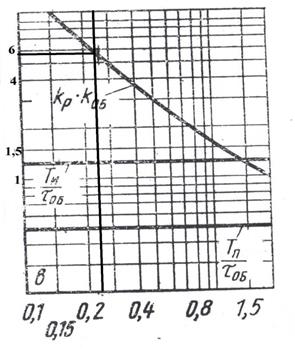
Рисунок 9 – Настройки ПИД-регулятора на статических объектах при процессе с минимальной квадратичной площадью отклонения


 3 Анализ замкнутой системы автоматического регулирования
3 Анализ замкнутой системы автоматического регулирования
Date: 2016-02-19; view: 436; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |