Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Структура и Основные технические характеристики приводов машин
|
|
В общем случае структуру технологической машины можно представить в виде, показанном на рис. 1.1.

Рис. 1.1. Структура технологической машины
Несущая конструкция (корпус, станина, рама, кузов и т. п.) – это часть машины, на которой устанавливаются все устройства машины. Исполнительное устройство (рабочий орган) — это часть машины, которая непосредственно выполняет заданную работу, – перемещает грузы, режет материал, красит, сваривает, собирает и т. п. Привод — это часть машины, с помощью которой приводится в движение исполнительное устройство.
Привод может состоять из одного двигателя и устройства его управления (так называемый “прямой привод”), например, привод вентилятора (рис. 1.2), но обычно включает большее число компонентов.
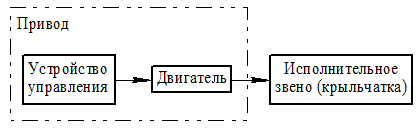
Рис. 1.2. Структура привода вентилятора
Структура устройства, приводимого в движение и управляемого человеком, изображена на рис. 1.3.
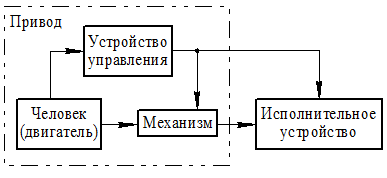
Рис. 1.3. Структура привода велосипеда
В качестве примера приведем велосипед. Здесь двигателем является человек, механизм выполнен в виде цепной передачи, муфты свободного хода и колеса, исполнительное устройство – это рама с седлом, она же является несущей конструкцией. Человек управляет механизмом и исполнительным устройством с помощью переключателя скоростей и руля.
Структура простого устройства, приводимого в движение двигателем и управляемого человеком, изображена на рис. 1.4.

Рис. 1.4. Структура привода шуруповерта
Пример – шуруповерт. Здесь двигателем является электромотор, механизм представлен в виде зубчатых передач и шпинделя с патроном, исполнительным органом является инструмент. Человек управляет двигателем посредством электронного регулятора, а механизмом – с помощью переключателя передач.
Значительно сложнее привод автомобиля. Он имеет множество устройств. Упрощенно структура привода перемещения автомобиля представлена на рис. 1.5.

Рис. 1.5. Структура привода автомобиля
Здесь мотор преобразует энергию сгорания топлива в механическую энергию. Устройство питания топливом (топливный насос, карбюратор или инжектор), устройство зажигания (катушка зажигания, трамблер, свечи), устройство газораспределения (распределительный вал, клапаны) обеспечивают работу мотора. Механизм (муфта сцепления, коробка передач, трансмиссия, колеса) передают и преобразуют движение мотора. Информационные устройства (датчики скорости, температуры, давления и др.) информируют человека и бортовой контроллер (на рис. 1.5 не изображен) о состоянии привода. Человек управляет приводом с помощью педалей газа и сцепления и рукоятки переключения передач.
Структура автоматического устройства, которое работает без участия человека, изображена на рис. 1.6. Подобная структура включает несколько (N) приводов, что часто встречается в машинах-автоматах. Здесь устройство управления машиной (например, контроллер) получает информацию от датчиков, расположенных на приводах и исполнительных устройствах, и управляет приводами согласно заложенной в него программе без участия человека. Человек периодически, в режиме загрузки программы управления, наладки и контроля за работой машины, взаимодействует, через пульт управления, с устройством управления машиной.
Таким образом, рассматривая различные структуры (рис. 1.2…1.6), видим, что привод включает, как минимум, двигатель – устройство для преобразования какого-либо вида энергии (электричества, газа, жидкости и т. д.) в механическую энергию. Чаще всего двигатель сопрягается с механизмом – устройством для передачи движения от двигателя к исполнительному устройству. Помимо передачи движения механизм, как правило, преобразует движение по виду (вращательное в поступательное и наоборот), а также по скорости и усилию (редуктор, мультипликатор).
Человек или автомат, так или иначе, управляют двигателем: включают и выключают двигатель, регулируют режим его работы. Поэтому в приводе всегда есть устройство управления двигателем.
Наконец, в состав привода большинства современных машин (даже бытовой техники) входят устройства информации — всевозможные датчики, передающие данные о состоянии самих приводов и окружающей среды. Наличие такой информации позволяет лучшим образом управлять машиной, существенно повышает надежность и качество ее работы.
К сожалению, у специалистов разного профиля нет единого определения понятия «привод». Специалисты по управлению под приводом понимают только управляющую часть, специалисты по электроприводу — только двигатель и устройство его управления (инвертор, преобразователь).

| Рис. 1.6. Структура автоматической машины |
Специалисты по механике под приводом понимают двигатель и механизм. Мы под приводом будем понимать весь комплекс устройств, обеспечивающих движение исполнительного устройства.
Любые приводы и их отдельные части (например, двигатели) характеризуются следующими основными параметрами:
1 Вид движения выходного (исполнительного) звена
- поступательное,
- вращательное,
- сложное плоское или пространственное.
2 Характер движения выходного звена
- однонаправленное,
- возвратно-поступательное или пространственное,
- вибрационное.
3 Кинематические параметры движения выходного звена
- ход s, шаг D s (м, мм), угол поворота j, шаг Dj (рад, град),
- скорость линейная V (м/с, мм/с), скорость угловая[2] ω (рад/с, град/с),
- ускорение линейное a (м/с2, мм/с2), ускорение угловое
e (рад/с2, град/с2).
4 Диапазон регулирования
- диапазон регулирования перемещения,
- диапазон регулирования скорости.
5 Точность движения и остановки выходного звена
- точность остановки (позиционирования),
- точность воспроизведения траектории движения,
- точность воспроизведения скорости.
6 Динамические параметры
- быстродействие привода,
- частотные характеристики привода.
7 Силовые параметры
- номинальное развиваемое усилие на выходном звене
при поступательном движении – сила F (Н),
при вращательном движении – момент М (Нм).
- номинальная мощность
при поступательном движении – P = F∙V (Нм/с, Вт),
при вращательном движении – P = М∙ ω (Нм/с, Вт).
- удельное усилие и удельная мощность

или

где m – масса привода,
v – объем, занимаемый приводом.
- перегрузочная способность
 или
или  ,
,
где Fmax и Мmax – максимально допустимые, действующие кратковременно (обычно несколько секунд) усилия.
8 Инерционность движущихся частей привода
- масса m (кг) или момент инерции J (кг∙м2) движущихся деталей привода,
- приведенная к двигателю масса m пр (кг) или момент инерции J пр (кг∙м2) движущихся деталей привода.
9 Коэффициент полезного действия (КПД) привода[3]
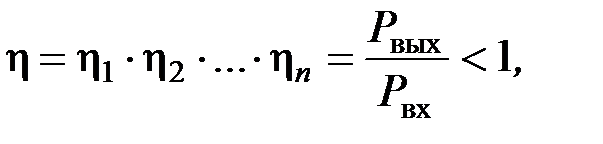
где h1, h2 … - КПД отдельных частей привода.
10 Надежность (безотказность) привода, ресурс (время службы), безопасность, ремонтопригодность, стоимость, доступность и др.
Date: 2015-09-24; view: 1362; Нарушение авторских прав