Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 4 page
JT *
| (l+fe)?M |
| ■G6 |
л* м
Определим по заданным размерам возможное значение SJS&. Из рис. 8-13 очевидно, что DM меньше Dg на а миллиметров. Таким образом, SJS$ = n
_. при а = 2 мм 5M/S6= -|Ц7.
Примем k = 0,3. Тогда Вм- 0,7/1,3.
Чтобы обеспечить ZJg > 0,6 Тл, должно выполняться условие Бм 0,6-1,3/0,7 ^ 1,1 Тл. Из кривых магнитных материалов (рис. 8-12) видно, что в этом случае лучше использовать материал ЮИДК 25БА, причем при индукциях в магните выше 1,1 Тл, как видно из кривой для этого материала, отношение Вы/Нм ^ 1,1/(45-103) = «2,4-10-5.
Таким образом, можно сказать, что длина магнита должна быть выбрана так,
Sfr I
чтобы удовлетворялось условие ~~ ^ 2,4 • 10-&. Из этого соотношения
•Ьи 0
| : 17 ММ. |
| кА/м 500 450 400 350 300 250 200 150 100 |
| Рис. 8-14 |
находим длину магнита:
1,3
4л • Ю-7 -—у- ~ ^ 2,4 • т.е./,
Теперь можно составить схему магнитной системы и произвести ее точный расчет, учитывая сопротивление стальных участков и проводимости отдельных путей утечек. После такого расчета или в процессе его должны быть соответствующим образом скорректированы размеры магнитной системы.
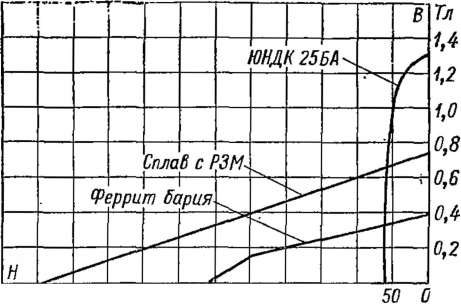
Свойства магнитных материалов. В качестве материалов постоянных магнитов в настоящее время используются литые сплавы, основными компонентами которых являются железо, никель и кобальт; порошковые материалы с наполнителями в виде пластмасс, ферриты с добавками бария или кобальта и сплавы кобальта с добавками редкоземельных элементов (интерметалл иды). В измерительных преобразователях используются в основном магниты первой группы благодаря их высокостабильным свойствам. Фер- ритовые магниты и магниты на основе РЗМ (редкоземельные металлы) имеют очень высокую коэрцитивную силу (рис. 8-14) и могут обеспечить относительно высокие индукции (0,2—0,6 Тл) при большом магнитном сопротивлении внешней цепи, т. е. в разомк
нутых цепях и при малых габаритах магнитов, однако по стабильности значительно уступают литым магнитам. Температурные коэффициенты индукции (ТКИ) составляют в области температур 20—100 °С
примерно 0,002 К"1 для ферритов и 0,0004 К"1 для сплавов на основе РЗМ.
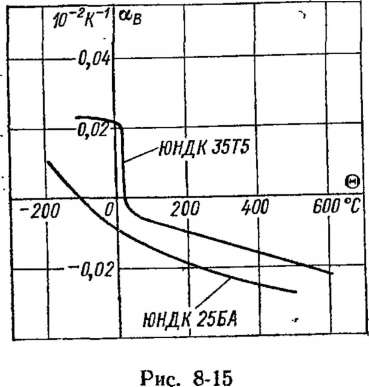
ТКИ некоторых литых материалов в зависимости от температуры, полученные Т. И. Булыгиной и В. В, Сергеевым, приведены на рис. 8-15. Положение на температурной оси области, в которой ТКИ — 0, зависит от выбора рабочей точки магнита. Рабочие точки магнитов, результаты исследования которых приведены на рис. 8-15, соответствуют точкам Вы = Bd. При £м > Bd кривые смещаются влево и наклон их меняется.
Таким образом, значение ТКИ для одного и того же магнита может быть разным в зависимости от степени его размагничивания, т. е. зависит от магнитной цепи, в которой магнит используется. Однако можно сказать, что наибольшей температурной стабильностью обладает материал ЮНДК 35Т5 и его температурный коэффициент в области 20—40 °С может быть даже равен нулю, другие материалы характеризуются значениями ав = —(1 2) 10~4 К"4.
8-3. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ И ИНДУКТИВНЫЕ ДЕЛИТЕЛИ НАПРЯЖЕНИЯ
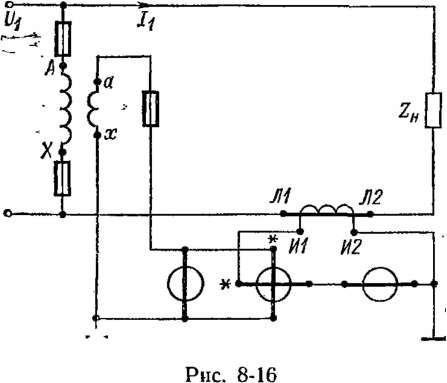
Схема включения измерительных трансформаторов тока (ИТТ) и напряжения (ИТН) в цепь показана на рис. 8-16.
Измерительные трансформаторы позволяют расширить пределы измерения приборов, уменьшая в определенном соотношении ток и напряжение, и, кроме того, отделить и хорошо изолировать цепи измерительных приборов от силовой цепи, что дает возможность заземлить вторичные цепи и предохранить от опасности обслуживающий их персонал. Первичная цепь ИТН включается через предохранители, чтобы при неисправности трансформатора он не оказался причиной аварии. Предохранители, установленные во вторичной цепи, служат для защиты трансформатора от замыканий в нагрузке. Вторичный ток ИТТ равен 5 А, для специальных целей выпускаются трансформаторы на 1 и 2 А, вторичное напряжение ИТН может быть 100, 100/1^3 и 150 В.
|
Точность измерительного трансформатора характеризуется двумя величинами: погрешностью коэффициента трансформации, определяющей отличие действительных вторичных токов и напряжений от номи-
|
Нальных, V/ = (/иом — /)//ном и = (£Уном — U)/UmM и угловой погрешностью ф/ или ф^, определяющей фазовый сдвиг между векторами токов или напряжений в первичной и вторичной обмотках. Угловая погрешность должна учитываться при включении во вторичную цепь фа- зочувствительных приборов, например ваттметра, так как их показания, в частности ваттметра Р' = U2I2 cos [ф + + (фи + Ф/)1» зависят от алгебраической суммы (ф£/ + ф/). При включении фазочувстви- тельных приборов важно также не изменить направление одного из векторов на 180° неправильным включением обмоток, поэтому концы первичных и вторичных обмоток трансформаторов маркируются, как показано на рис. 8-16.
По точности ИТТ и ИТН^.подразделяются на несколько классов. Характеристики наиболее точных лабораторных измерительных трансформаторов (ГОСТ 23624—79 и ГОСТ 23625—79) приведены в качестве примера в табл. 8-1,
ч 1 Таблица 8-1
|
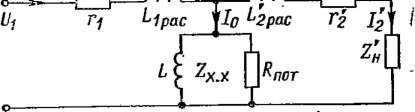
Причины погрешностей измерительных трансформаторов легко объяснимы из рассмотрения их эквивалентной схемы. Приведенная к первичной обмотке эквивалентная схема (см. рис. 8-2, б) для диапазона частот, в котором еще можно пренебречь межвитковыми емкостями, представлена на рис. 8-17. При рассмотрении погрешностей
в данном случае не учитываются также ЭДС помех етт и шумовое напряжение 0Ш.
Для эквивалентной схемы (рис. 8-17) отношение токов
h Zx.x + Za + Z„ i г Zs-J-ZH /о i\
'2 ^х. х ^х. х
| Zx v+Z^ + Zii |
отношение напряжений
М'
Оо L
= 14.(^+2? + + (8-2)
|
\ zH zXi x Zv xzH/
Для идеальных трансформаторов приведенный коэффициент трансформации должен равняться единице. Таким образом, вторые члены
уравнений (8-1) и (8-2) харак- fe w теризуют погрешность. Как вид-
11 г.—, J Л У' г^ *.—■ л ц2 но из уравнений, значение погрешности зависит от сопротивления, включенного во вторичную цепь, и для ИТТ будет минимально при Z„ = 0, т. е. в режиме короткого замыкания, Рис. 8-17. а для ИТН —при Z; = oo,
т. е. в режиме холостого хода. Значения погрешностей зависят также от Zxx — сопротивления холостого хода трансформатора и будут тем меньше, чем больше Zxx, т. е. чем меньше ток холостого хода трансформатора.
Если возможно скомпенсировать ток холостого хода, т. е. добиться 10 = 0, например, с помощью операционного усилителя, то принципиально погрешности ИТТ можно свести к нулю; таким же методом можно понизить погрешность ИТН.
Требования к конструкциям ИТ определяются в первую очередь необходимостью обеспечения возможно большего сопротивления ZA<X, Это сопротивление равно
Z = = /^Ф ^;'o)ic,s = х,х /о ЙЦщ 1 Ш
. S S. • S /М-6) Q\
= }(X)W] -j fi = (X)Wi -j ^ 2 * (8-3)
и зависит от магнитной проницаемости материала сердечника. ИТН работает при относительно больших индукциях (В ~ 0,8 -s- 1,5 Тл) и желательно выбрать индукцию так, чтобы магнитная цепь работала в режиме \х = jxmax* ИТТ почти полностью размагничены, так как МДС первичной и вторичной обмоток направлены навстречу друг другу, индукция в сердечнике В ^ 0,02 -ь 0,15 Тл, В этой области (см. рис. 8-8) магнитные проницаемости относительно невелики, и увеличения Zx>x добиваются за счет увеличения площади сердечника S.
Аварийный режим, связанный с разрывом вторичной цепи ИТТ при включенной первичной, приводит к намагничиванию сердечника, изменению \х и соответственно изменению коэффициента трансформации. Поэтому ИТТ необходимо специально размагничивать, постепенно увеличивая ток в его вторичной обмотке изменением сопротивления от Zh оо до Zh —>- 0.
Как видно из выражения (8-3), сопротивление Zx x при прочих равных условиях зависит от магнитного потока через сердечник, который изменяется при изменении преобразуемого тока или напряжения. Поэтому погрешности ИТ зависят от отношений ///ном и U/UliOM.
Для того чтобы разделить погрешности трансформации и угловые погрешности, удобно представить соответствующие сопротивления в виде Z = Zefr. В этой форме коэффициент трансформации ИТТ запишется в виде
П/ = 1 И--------------- 7----------------------- —
_ J j z'2 cos (Фа—Фо) + cos (фн — ф0) ^
z; sin (ф2 —ф0)+^н sin (Фн~ Фо) ""г / 7
^х. х
Погрешности реального ИТТ относительно идеального ИТТ соответственно равны
Z2 COS (Ф2 - Фо) + ZH COS (Фн ~ Фо)
Г/ ~----------------- 7----------------------»
^х. х
__ z- sin (ф2 -ф0) + ^ Sin (фн-ф0) ф! — drcts 7 •
Аналогично полученные погрешности ИТН составляют
Z\ COS (фх фн) -}- Zg COS (ф2 фн), =-------- 2!"------- h
cos (ф1 - ф0)+ztz; sin (Фг+Ф2 - Ф0 - Фн) '7
И^Х. X
Ц)и = arcta pi^ (Ф2~ФЛ) +
^н sin № ~Фо) sin (Фх + Фз —Фр-
тивные делители имеют погрешность коэффициента деления 10~3— 10~4% при фиксированной частоте. Частотный диапазон ИДН достигает /верХ//вижн «Ю4, однако в этом диапазоне погрешности существенно возрастают. Наиболее широко распространенная схема ИДН, схема Кельвина — Вар- лея, представлена на рис. 8-19. ИДН с регулируемым в десятичной
| п1 v ч\ | П1реамьн- ^^J^Z^Zs i % ом | |
| + т | ||
| t 1 у | > | |
| t (У1ном)т1п |
| Whom |
| Рнс. 8-18 |
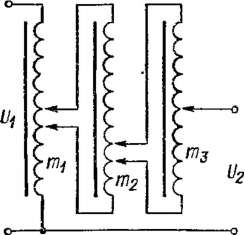 Рис. 8-19
Рис. 8-19
|
ния, широкое применение нашли они также в цифровых бескоромыс- ловых весах.
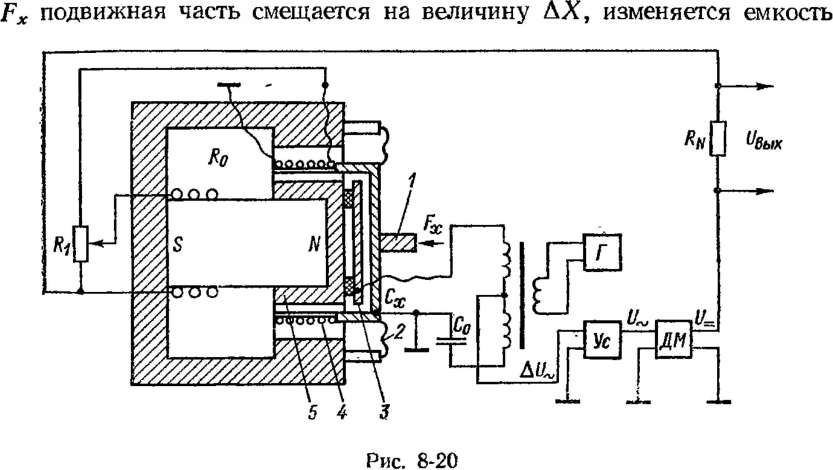
Принцип действия датчика уравновешивания с МЭОП поясняется на рис. 8-20. Измеряемая сила Fx действует на подвижную часть датчика Jt закрепленную относительно корпуса на растяжках, мембране или плоских пружинах 2. Обмотка 4, расположенная на цилиндрическом каркасе, находится в радиальном зазоре магнитной системы. Торец каркаса и пластина 3, укрепленная с помощью изоляторов на полюсном наконечнике 5, образуют емкостный преобразователь. Этот преобразователь, имеющий емкость Сху включается в измерительный мост, питаемый от высокочастотного генератора F. При действии силы
|
Сх, выходной сигнал измерительного моста усиливается усилителем Ус и выпрямляется демодулятором ДМ„ Выпрямленный ток / подается в обмотку 4 таким образом, чтобы сила Fp = р/, создаваемая в результате взаимодействия тока с магнитным полем, была направлена навстречу измеряемой силе и уравновешивала ее. Сила, возникающая при взаимодействии электрического тока /, протекающего по катушке, с полем постоянного магнита, определяется формулой Fp = рмэ/ = Blwl, где В — индукция в зазоре магнита; I — средняя длина витка катушки; w — число витков катушки. Работа датчика описывается уравнением Fx: = Fp + AF, и о значении измеряемой силы можно судить по току /, измеряемому по падению напряжения на образцовом резисторе RN. Поскольку значение AF равно не более (0,01 -г- 0,001) Fp, то точность датчика определяется в основном точностью обратного преобразователя, т. е. стабильностью коэффициента р. Силы, создаваемые МЭОП, составляют от 10~2 Н в акселерометрах до 10—102 Н в весах.
Погрешности лучших МЭОП оцениваются значениями порядка 0,01—0,005%.
Основными причинами возникновения погрешности (при условии, что температура внешней среды неизменна) являются: а) нестабильность свойств магнита магнитной системы; б) неоднородность магнитного поля в диапазоне перемещения катушки; в) изменение индукции
магнита вследствие воздействия на него МДС, создаваемой при прохождении тока через катушку; г) наличие электромагнитной составляющей силы Fm = 0,5 PdL/dkX, возникающей в случае, если индуктивность катушки изменяется при ее перемещении ДХ; д) нагрев катушки собственным током.
Для уменьшения погрешности от нестабильности следует при конструировании магнитной системы особое внимание уделить жесткости соединения магнита с маг- нитопроводом и после сборки подвергнуть преобразователь старению путем многократных изменений температуры. Чтобы избежать влияния близости ферромагнитных масс, преобразователь надо выполнять с внутренним магнитом; в этом случае внешний магнитопровод служит до статочно хорошим экраном.
Погрешность от неравномерного распределения индукции в зазоре появляется из-за того, что при смещении катушки на расстояние Д (рис. 8-21) часть ее витков с левой стороны (на рисунке зачернены) переместится из области магнитного поля со средней индукцией Во в область со средней индукцией + ДВъ а правые витки — в область В'п — Д В2.
Погрешность определяется формулой
_АВ1 — АВ, А
у~ I 9
где ДБХ и ДВ2 — средние изменения индукции на соответствующих участках при перемещении катушки на расстояние Д; / — длина катушки; В0 — средняя индукция в области расположения катушки.
Погрешность будет тем меньше, чем меньше перемещение катушки, и поскольку в приборах уравновешивания перемещение подвижной части не превышает 0,01—0,1 мм, то эта погрешность достаточно мала. Однако для ее уменьшения размеры катушки должны быть выбраны таким образом, чтобы катушка при перемещении не приближалась к краю зазора ближе, чем на его длину fi. При необходимости увеличения габаритов катушки можно сделать ее длину I больше ширины зазора /0 на величину I — 10 = 0,8 б (см. § 8-2). Тогда при небольшом смещении катушки (Д < 0,1 6) изменения индукции ДBt и ДВ.г будут иметь разные знаки и примерно одинаковое значение.
| 1о |
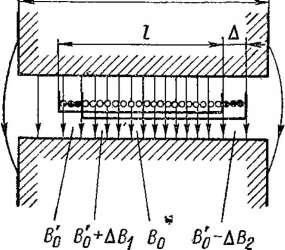 Рис. 8-21
Рис. 8-21
|
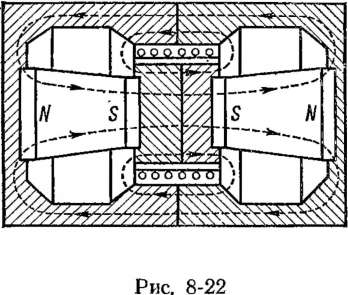
Существенное уменьшение погрешностей от воздействия МДС катушки достигается использованием симметричной магнитной системы. Например, в магнитной системе (рис. 8-22) один из магнитов подмаг- ничивается током катушки, в то время как другой размагничивается.
Погрешность, вызываемая гистерезисом, для такой магнитной системы не превышает 0,03% при МДС катушки до 100 А и длине магнитов (ЮНДК24) 20 мм.
В конструкциях с одним магнитом следует предусмотреть специальную обмотку, МДС которой компенсирует МДС катушки, например, так, как это показано на рис. 8-20 (обмотка R0). Ток в обмотке R0 и, следовательно, создаваемую им дополнительную МДС можно регулировать перемещением движка на резисторе Rx таким образом, чтобы погрешности гистерезиса и линейности были минимальными во всем рабочем диапазоне прибора.
Самой существенной погрешностью МЭОП, определяющей, в случае если габариты и масса датчика ограничены, предел измерения прибора, является погрешность от нагрева катушки собственным током. Эта погрешность тем более нёприятна, что зависит не только от измеряемой величины и от времени ее действия, но и от величины, действовавшей в предшествующий измерению отрезок времени, так как постоянная времени нагрева датчика обычно составляет минуты и даже десятки минут.
: Предел измерения датчика Fg = 1В1пр ограничивается допустимой мощностью Р — /2/?кат) выделяемой в катушке обратного преобразователя. Учитывая, что сопротивление катушки RKar •— Р^нр/^пр» предел измерения датчика находим как Bj/73 ]//nD«Snp/p, и,
как видно из этого выражения, он зависит от объема провода Упр = = JiipSnp и не зависит от сечения провода. Объем, занимаемый обмоткой, можно выразить следующим образом: 1/пр = k3an80SKaT, где SKaT — боковая поверхность катушки; — активная длина зазора, занимаемая обмоткой; /гзап — коэффициент заполнения медью.
Значение допустимой мощности Р = PyRSKaTB зависит от боковой поверхности катушки SKaT, допустимой температуры перегрева © и удельной мощности Руд, определяемой условиями охлаждения (см. § 2-2).
На основании экспериментальных исследований ряда датчиков с МЭОП значение Руд может быть принято равным Руд =100 Вт/(м2 «К).
Учитывая приведенные формулы, предел измерения датчика можно выразить так:
^зап/Р"
|
Однако чаще при конструировании датчиков возникает обратная задача: при заданном пределе измерения найти оптимальные размеры датчика. Как видно из последней формулы, предел измерения датчика зависит от индукции в зазоре, боковой поверхности катушки и активной длины зазора. Возрастание одной из этих величин при сохранении двух других неизменными неизбежно приводит к увеличению объема
магнита, поэтому для определения оптимальных размеров датчика необходимо связать предел измерения непосредственно с объемом магнита Формула, связывающая эти величины:
т/2 _ р* _______ И™ 46К
где Вм и Ям — индукция и напряженность в материале магнита, размеры которого выбираются таким образом, чтобы Вм = Ва и #м = т. е. соответствовали координатам экстремальной точки кривой размагничивания, определяющей для данного материала максимум произведения ВН\ jxM = BJHM, 6К — конструктивная длина зазора, определяемая толщиной каркаса и двумя технологическими зазорами и выбираемая минимально возможной (длина активного зазора 60 для получения минимального объема VM выбирается равной 6К); kn = = SKaT/Sn и SJSU — коэффициенты, определяемые как отношения площадей боковой поверхности катушки SKax, полюса S„ и магнита Sn и в первом приближении близкие к единице.
Допустимая температура перегрева © определяется допустимой погрешностью, возникающей в результате нагрева катушки и магнита и изменения его индукции при действии больших входных величин, и обычно принймается равной © = 1 -г- 3 °С.
В тех случаях, когда габариты МЭОП не ограничены строгими требованиями минимальной массы датчика, например в весах, габариты которых определяются в первую очередь размерами платформы под груз, мощность МЭОП ограничивается не его нагревом, а выход-- ной мощностью электронной схемы, и соотношения размеров получаются иными.
При заданном на обмотке напряжении 1/обя и индукции в зазоре В сила, создаваемая МЭОП, определяется формулой
Fp = BlnpI = BlnpUo6J Rnp = лШобм^Р/(4р),
где ^пр — диаметр провода и р — его удельное сопротивление.
При индукции в зазоре В = 0,5 Тл, Uo6m = 5 В и требуемой силе ■5 Н диаметр провода должен быть не менее dnp = 0,2 мм.
Если кроме напряжения задан и ток через обмотку, то можно определить и примерные размеры зазора датчика, необходимого для размещения обмотки.
Действительно, учитывая, что /П}) = nDw и w — /б0/и/, где D — средний диаметр обмотки; I — длина обмотки; б0 — часть зазора, занятого обмоткой, и w' — плотность намотки, т. е. число витков на единицу площади, получим, что размеры обмотки связаны с силой формулой D/60 ^ Ffti(nBIw'). В частности, для рассмотренного выше примера при допустимом токе 100 мА Ш60 ^ 5,0/(л>0,5*0,1 -1640 х X Ю4) = 1,9- Ю-6 м3; если принять 60 = 1 мм, / = 25 мм, то D = = 75 мм.
Компенсация жесткости подвески. Конструкция магнитоэлектрического преобразователя позволяет относительно просто дополнить его устройством, вносящим в датчик дополнительную «электрическую» жесткость, которая может как увеличивать, так и уменьшать жест
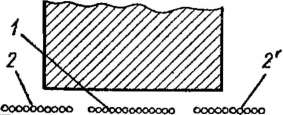
кость подвески. Реализация устройства «отрицательной» жесткости поясняется на рис. 8-23, а.
| и |

| -- оо ооооооосб од -- |
|
|
Для этой цели на каркасе катушки, кроме основной обмотки 1У располагаются две полуобмотки 2 и 2'. Эти полуобмотки симметричны, расположены в области, где еще действует магнитное поле (см. рис. 8-10), и включены встречно. Через полуобмотки пропускается
Стабилизатор тот
|

|
| Fx |
Рис. 8-23
ток /0 от стабилизатора тока в таком направлении, чтобы силы взаимодействия полуобмоток с магнитным полем стремились втянуть каждую из них под полюс. При отсутствии входной величины и симметричном начальном положении подвижной части силы взаимодействия полуобмоток с магнитным полем, направленные встречно, компенсируют друг друга. При смещении подвижной части вправо сила F2 увеличивается, а сила F'2 уменьшается, разность сил F2 — F'2 приблизительно линейно зависит от перемещения и направлена в ту же сторону, что и механическая сила, вызывающая смещение подвижной части. В результате достигается эффект снижения жесткости подвески, т. е. вносится «отрицательная» жесткость.
Значение дополнительной жесткости, созданной в таком устройстве, составляет В7Д «2Iol^Bw''g/Ь, где /„ — ток стабилизатора; /0 — длина витка; g/б — отношение ширины обмотки к длине зазора; w"—линейная плотность намотки. При необходимости компенсации электрическим путем больших жесткостей подвески приходится занимать под это устройство часть рабочего зазора и располагать полуобмотки так, как показано на рис. 8-23, б; в этом случае Wn = 2/0/0Вш". Подробно вопросы, связанные с созданием устройства «электрической» жесткости, исследованы В. С. Моисейченко. *
Магнитоэлектрогидродинамические обратные преобразователи (МЗГДОП) основаны на использовании явления взаимодействия, проте
кающего в электропроводящей жидкости электрического тока с магнитным полем.
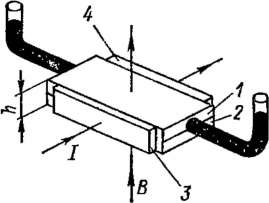
На рис. 8-24 показано устройство камеры МЭГД преобразователя манометра. Камера преобразователя образована двумя профилированными пластинами / и 2 из изоляционного или покрытого изолирующим слоем материала и двумя пластинами токопроводов 3 и 4. Камера размещается в зазоре магнитной системы таким образом, чтобы направление индукции соответствовало указанному на рис. 8-24. В торцевых частях камеры имеются отверстия, в которых закреплены выводные трубки. Камера полностью, а трубки частично заполнены рабочей жидкостью.
Сила, создаваемая в элементарном объеме жидкости, определяется формулой dE = [BJ] dVy и если допустить, что индукция В и плотность тока J равномерно распределены в рабочей зоне преобразователя и взаимно перпендикулярны, то выходное давление определяется формулой Р = BI/h, где h — высота канала. Минимальная высота составляет h = 0,1 -s- 1,0 мм, а максимальное выходное давление при В = 1,0 Тл и / = 5 А равно Р = (5 0,5) 1.04 Па. МЭГДОП подробно исследованы В. Я. Ложниковым и М. М. Фетисовым, ими предложен также ряд оригинальных конструкций манометров и акселерометров с МЭГДОП. *
8-5. ЭЛЕКТРОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ ИЗМЕРИТЕЛЬНЫХ МЕХАНИЗМОВ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРИБОРОВ
В аналоговых электроизмерительных приборах прямого преобразования широко используются электромеханические измерительные преобразователи, входной величиной которых является ток, а выходной — перемещение указателя отсчетного устройства. Эти преобразователи получили название измерительных механизмов (ИМ).
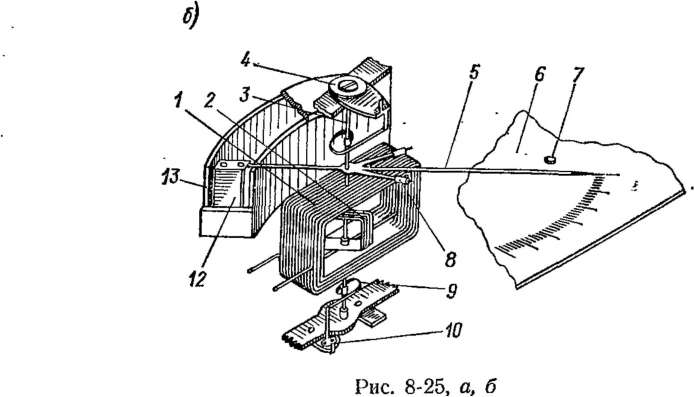
Устройство электромеханического прибора и назначение отдельных конструктивных элементов рассмотрим на примере амперметра с электромагнитным ИМ, схематически показанным на рис. 8-25, а. Основным элементом неподвижной части электромагнитного ИМ, участвующим в создании вращающего момента, является катушка /, а основным элементом подвижной части — сердечник 2 из ферромагнитного материала, закрепленный на оси 3.
На рис. 8-25, показаны принципиальные устройства ИМ и других типов — электродинамического (ЭД), фер роди нами чес кого (ФД) и магнитоэлектрического (МЭ).
В ЭД, ФД и МЭ измерительных механизмах элементом подвижной части, участвующим в создании вращающего момента УИвр, является рамка 2 (рис. 8-25, б, е, г), намотанная тонким проводом. На осях 3 укреплены подвижные части ЭМ, ЭД и ФД механизмов. Ось 3 снабжена на концах кернами и может поворачиваться в подпятниках 4. Подвижная часть МЭ измерительного механизма (рис. 8-25, г) укреплена на двух растяжках 3 (на рис. 8-25, г показана оборванная рас
тяжка). С подвижной частью жестко связана стрелка 5, которая при повороте подвижной части перемещается над неподвижно укрепленной шкалой 6. На шкале установлены упоры 7, чтобы уберечь стрелку и подвижную часть от повреждений.
При включении электромагнитного ИМ в электрическую цепь магнитное поле, создаваемое протекающим по катушке током / (входная величина), втягивает сердечник внутрь катушки, в результате чего возникает вращающий момент Мвр. Зависимость момента /Иир1 при токе 1У от угла отклонения подвижной части приведена на рис.' 8-26. Если ток имеет большее значение, то тогда вращающий момент возрастает (ток /2, момент УИвр2),
|
Date: 2015-09-18; view: 483; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |