Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
У ___ сО). с____
ВЫХ ~Со.С J + j(dRo сСо с + 1 [/(oRo сСо с (1 +1 1
где Сох и R0mс — емкость и сопротивление в цепи обратной связи;
Ю4 -f- 105 — коэффициент усиления усилителя; RBX = 1010 -з- Ю11 Ом — входное сопротивление усилителя.
В области частот со^>1/т, где т = /?0ЛС0.с>
п ' q__________
вьв " Со. с + С0. Jk+ (С0 + С«)/Л •
Основным достоинством схемы является независимость выходного напряжения от емкости (С0 + Ск) и возможность увеличения чувствительности при уменьшении емкости С0.сэ однако применять емкости, меньшие 50—100 пФ, нецелесообразно, так как при этом заметное влияние начинают оказывать паразитные емкости. Вторым достоинством схемы является возможность обеспечения больших постоянных времени. Постоянные времени лучших конденсаторов, определяемые емкостью и сопротивлением изоляции конденсаторов, составляют 104—105 с.
Однако реализовать такую постоянную времени трудно из-за наличия входного тока усилителя. Входные токи усилителей лежат в диапазоне 10"11 — 1СГ14 А; таким образом, дрейф усилителя по заряду сот ставляет 10—10"2 пКл/с, что при емкости обратной связи Сс.с = = 100 пФ приводит к дрейфу по напряжению 100—0,1 мВ/с. При дрейфе 100 мВ/с усилитель выходит из режима через 10—100 с. Резистор обратной связи /?ох включается для того, чтобы обеспечить режим работы усилителя. Если допускается смещение нуля в пределах 100 мВ, то при /вх = 10~и А сопротивление R0.c должно быть не больше 1010 Ом. Реальные постоянные времени датчиков с усилителями заряда составляют 10—100 с. Однако уже при таких постоянных времени оказывается возможным проводить квазистатическую градуировку пьезоэлектрических датчиков, что является огромным достоинством измерительной цепи с усилителем заряда.
Ключ К1, включенный параллельно конденсатору Сох (рис. 6-6, б), служит для быстрой установки нулевого начального напряжения на выходе. Замыкая этот ключ, оператор осуществляет разряд конденсатора С0.с, который при больших значениях т = C0.ci?0.c протекает весьма медленно. Если произвести начальную установку при нагруженном датчике, то тем самым мы как бы сместим нулевой уровень градуировочнои характеристики на значение этой нагрузки, ^го может оказаться весьма удобным при работе, например, с пьезоэлектрическими весами, когда требуется исключить из общего результата измерения вес тары. Конденсатор Сох и резистор Rox, как правило, выполняются в виде переключаемых наборов элементов (рис. 6-6, в), чтобы иметь возможность изменять коэффициент усиления усилителя путем изменения С и нижнюю границу полосы пропускания изменением R. Чувствительность большинства усилителей заряда лежит в диапазоне 0,1—10 мВ/пКл, однако известны усилители с чувствительностью 1 В/пКл.
В качестве вспомогательной цепи в усилитель заряда может быть введена цепь проверки чувствительности. Подобная цепь в усилителе по схеме рис. 6-6, в образована источником опорного напряжения UNt резистором Rlf ключом К2 и конденсатором Сд/. При замыкании ключа К2 на вход усилителя подается опорный заряд qN = UNCN. Отношение изменения выходного напряжения &UBUJqN определяет чувствительность усилителя.
Конструкции пьезоэлектрических преобразователей. Достоинствами пьезоэлектрических преобразователей являются малые габариты, простота конструкции, надежность в работе, возможность измерения быстропеременных величин, очень высокая точность преобразования механических напряжений в электрический заряд. Для кварца, который по своим упругим свойствам близок к идеальному телу, преобразование механического напряжения в электрический заряд осуществляется с погрешностью 1СГ4—10~6. В последние годы в связи с развитием высокоточной электроники появилась возможность реализовать эту точность в широком частотном диапазоне и в измерительных цепях, преобразующих заряд. Таким образом, пьезоэлектрические преобразователи в перспективе являются наиболее точными преобразователями для датчиков давлений, ускорений, сил.
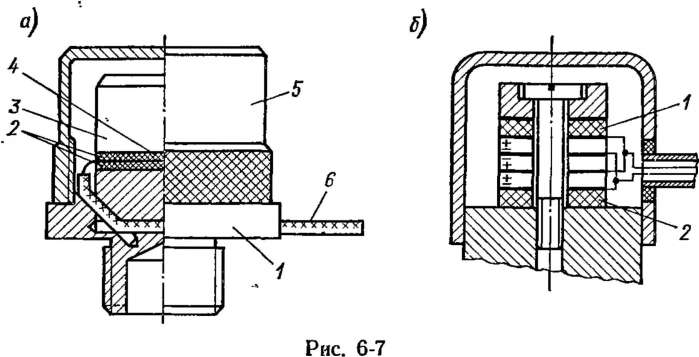
На рис. 6-7, а представлена конструкция пьезоэлектрического датчика ускорений. Все элементы датчика крепятся к основанию /, выполненному из титана. Преобразователь 2 состоит из двух включенных параллельно пьезоэлементов из кварца Х-среза. Инерционная масса 3 для уменьшения габаритов датчика изготовлена из легко- обрабатываемого сплава ВНМЗ-2 с высокой плотностью 18 Мг/м3 (18 г/см3). Сигнал с кварцевых пластин снимается при помощи вывода из латунной фольги 4, соединенного с кабелем 6. Кабель крепится к основанию при помощи пайки. Датчик закрывается крышкой 5, навинчиваемой на основание. На основании 1 нарезана резьба для крепления датчика на объекте. Масса датчика 35 г, рабочий диапазон 1—150 м/с2.
|
При конструировании датчика акселерометра одним из основных вопросов является крепление пьезочувствительных пластин к основанию и инерционной массе. Сочленение пластин с основанием и инерционной массой в датчике, представленном на рис. 6-7, а, осуществляется посредством пайки. К кабелю, соединяющему датчик акселерометра с усилителем, предъявляются следующие требования: большое сопротивление изоляции, малая емкость между жилой и экраном, гибкость и антивибрационность. Последнее означает, что при вибрации кабель не должен наводить на вход усилителя ЭДС, возникающую в результате трения изоляции об экран при тряске кабеля. Лучшим является кабель типа АВК-3, емкость этого кабеля составляет 70—80 пФ/м.
При длинных линиях связи между датчиком и усилителем для уменьшения помехи необходимо симметрирование измерительной цепи (см. § 3-4). В датчике, показанном на рис. 6-7, а, сопротивления связи между выводами и корпусом резко несимметричны, так как вывод 4 от внутренних пластин изолирован от корпуса, а внешние пластины и вывод от них, которым является экран кабеля, непосредственно соединены с корпусом. Для обеспечения симметрии сопротивлений связи датчик выполняется из нечетного числа пластин, соединенных так, как показано на рис. 6-7, б. Сквозь центральные отверстия пластины через изоляторы винтом прижимаются к корпусу. Выводы пластин подключаются к усилителю с симметричным входом.
Для повышения чувствительности датчиков используются пьезо- элементы из пьезокерамики, имеющей пьезомодуль значительно выше
|
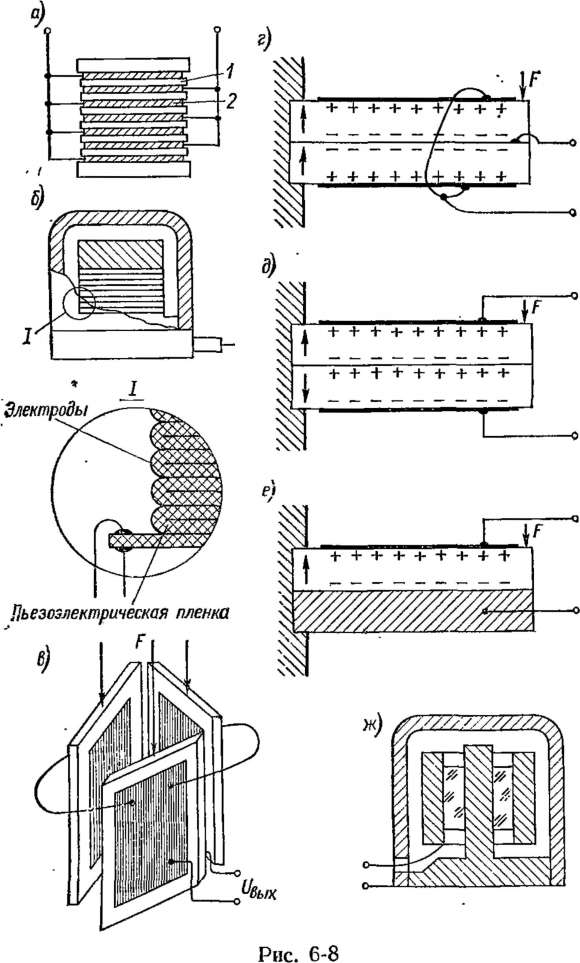
по сравнению с кварцем- Пьезоэлемент выполняется в виде ряда параллельно соединенных при помощи металлических прокладок 2 пластин 1 (рис. 6-8, а). В этом случае чувствительность преобразователя определяется формулой S == dnn (Свх + пС0), где п — число параллельно соединенных пластин; С0 — емкость одной пластины.
ЭД. И. Субботин предложил использовать в пьезоэлектрических преобразователях фольгированную с двух сторон пьезоэлектрическую пленку, складывая и после этого запекая ее так, как показано на рис. 6-8, б.
Увеличение чувствительности достигается и при использовании поперечного пьезоэффекта, однако в этом случае тонкая пластина, нагружаемая вдоль, может потерять устойчивость. Для повышения устойчивости может быть применена схема нагружения, показанная на рис. 6-8, е. Преобразователь состоит из трех вертикальных пластин Х-среза, все внутренние и все внешние обкладки которых соединены.
Высокую чувствительность имеют также преобразователи с пьезо- элементами, работающими на изгиб. Пьезоэлемент, называемый би- морфным, составлен из двух пластин. При действии силы F пьезоэлемент прогибается, верхняя пластина испытывает растяжение, нижняя — сжатие и на пластинах наводятся заряды. Пластины в зависимости от направления положительных осей в них (оси указаны стрелками) могут соединяться как параллельно, так и последовательно, как это и показано на рис. 6-8, г и д\ там же даны и знаки зарядов. Кроме этого, в качестве одной из пластин может быть использован не пьезоэлемент, а металлическая накладка такой толщины, чтобы пьезо- пластина лежала выше нейтрального слоя (рис. 6-8, е).
Для повышения чувствительности используются также пьезоэле- менты, работающие на сдвиг. Схематическая конструкция пьезоаксе- лерометра с цилиндрическим пьезоэлементом, работающим на сдвиг, показана на рис. 6-8, ж.
Выпускаемые в настоящее время фирмой Брюль и Къер пьезоак- селерометры перекрывают диапазон ускорений 2-Ю-5—10е м/с2. Наиболее высокочастотные акселерометры имеют собственную частоту до 200 кГц при чувствительности 0,004 пКл/(м-с"2). Наиболее высокочувствительные пьезоакселерометры имеют чувствительность до 1000 пКл/(м-с~2), но их собственные частоты не превышают 1 кГц.
6-3 ПЬЕЗОРЕЗОНАНСНЫЕ ПРЕОБРАЗОВАТЕЛИ
В пьезоэлектрическом резонаторе происходит преобразование электрического напряжения между электродами в деформацию и механические напряжения в пьезоэлементе, которые вызывают ответную реакцию по выходу в виде зарядов на электродах, возникающих под действием механических напряжений. Обратимость пьезоэлектрического эффекта позволяет выполнять пьезорезонатор в виде двухполюсника, объединяющего системы электрического возбуждения механических колебаний и съема электрического сигнала.. Резонансные колебания в пьезоэлементе возникают в результате установления в нем стоячих ультразвуковых волн. Длина волны % — v/f, где v — скорость распространения ультразвука; f — частота излучения. Скорость распространения ультразвука в материале определяется как v = VEijtp, где Е у— константа упругости; р — плотность материала. Следовательно, длина волны X = ^.
Если длина волны % такова, что на отрезке h между гранями, от которых отражаются волны, укладывается целое число полуволн, то в пьезоэлементе устанавливаются стоячие волны. Таким образом, стоячим волнам соответствует частота возбуждающего напряжения
'лк==2h У где п — число уложившихся полуволн- Частота колебании, при которых на длине h укладывается одна полуволна, является основной частотой и равна /к — ^ j/"^-. При частотах, значительно меньших /к, ток в цепи возбуждающих электродов (рис. 6-9, а) мал и определяется в основном межэлектродной емкостью С0 и сопротивлением изоляции между электродами R0.
|
| а) |
| Со= — /?0М Со- |
-в)
| о— | |||
| =4 | Со | ||
| о-- |
| Рис. 6-9 |
По мере приближения частоты возбуждающего напряжения к частоте /к амплитуда механических колебаний растет. Пропорционально амплитуде колебаний увеличивается заряд на электродах, и в цепи возрастает составляющая переменного тока, вызываемая деформациями пьезоэлемента.
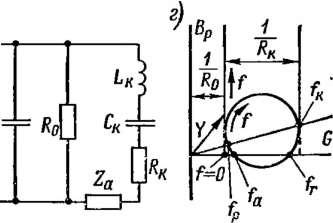
На рис. 6-9, б представлена эквивалентная схема (см. § 2-4) пьезо- резонатора. В этой схеме введены эквивалентные параметры: индуктивность LK = mlklbU емкость Ск — nkl^ и сопротивление RK1 образующие динамический контур эквивалентной схемы. Схема рис. 6-9, б соответствует свободно колеблющемуся, т. е. механически не нагруженному, пьезорезонатору (режим короткого замыкания, при котором усилия на поверхностях пьезоэлемента от внешних сил равны нулю). Схема рис. 6-9, в учитывает влияние внешних нагрузок в виде включенного сопротивления Za, которое может иметь как чисто активный (например, если существуют потери на акустическое излучение во внешнюю среду), так и реактивный (например, при присоединении к пьезоэлементу дополнительной массы) характер. В заторможенном состоянии, когда скорости смещений поверхностей пьезоэлемента равны нулю, сопротивление Za равно бесконечности (режим холостого хода). В режиме, близком к холостому ходу, работают пьезоэлектрические датчики давлений и ускорений, в которых используется прямой пьезоэффект. Поэтому в эквивалентной схеме этих датчиков динамическая ветвь обычно не учитывается.
Проводимость эквивалентной схемы (рис. 6-9, б) определяется формулой
У ^ R0 + /соСо+ l-^LKCK+/(oCK/?K 8=3
= J-4./озС; ^к/?к-Ь/(1-ш2/.кСк)(оСк До 0 (l-G32LKCK)2 + (02C2Ki?K
Для идеального пьезорезонатора (R0 = 00, RK = 0) проводимость бесконечно возрастает при условии 1 — со2LKCK = 0, т. е. при частоте
= 1 /T^^k^kv называемой частотой последовательного резонанса. Эта частота определяется исключительно параметрами введенного динамического контура и поэтому совпадает с определенной ранее как я -в ГЁif
сок=2тс/к-"=7^ У частотой механического резонанса.
Проводимость идеального пьезорезонатора бесконечно падает при
условии /соС0+ 1 J^L С = 0' т* е* при частоте сор = j/'1 \С£Со, называемой частотой параллельного резонанса (а иногда частотой антирезонанса).
Относительная разность между частотами последовательного и параллельного резонансов составляет (сор — сок)/сок = Ск/(2 С0). Для пьезорезонаторов из кварца емкостное отношение не превышает Ск /С0 = = 10~2 10~3 и частота сор может быть выше частоты сок не более чем на 0,5%. Соответственно и изменение частоты параллельного резонанса путем подключения параллельно резонатору добавочной емкости С'а и увеличения таким образом емкости С0 возможно не более чем на 0,1—0,01%.
В реальном пьезорезонаторе при частотах сок и сор проводимости контура не равны соответственно бесконечности и нулю, они имеют некоторое конечное значение, включающее в себя, кроме активной, и небольшую реактивную составляющую. Поэтому для характеристики пьезорезонатора вводятся еще две частоты, при которых проводимость чисто активная. Одна из этих частот соЛ называется частотой резонанса и оказывается чуть больше частоты сок, вторая (соа) называется частотой антирезонанса и оказывается чуть ниже частоты сор. Векторная диаграмма проводимости контура с указанием характерных точек показана на рис. 6-9, г.
Важной характеристикой контура является его добротность Q — ~ соKLK/RK, определяемая потерями энергии при колебаниях. В состав потерь входят: потери собственно в кварце, потери в материалах электродов, потери на акустическое излучение в окружающую среду, потери на границе колеблющегося элемента и неподвижных элементов крепления, потери во входном элементе присоединяемой электрической схемы. Теоретическая добротность кварцевых резонаторов, если учитывать только потери в кварце, может достигать значения, определяемого из соотношения Qfr = 1,2 -1013; реальные добротности зависят от конструкции резонаторов.
Основой пьезорезонансного частотного датчика является пьезо- резопатор, частота которого изменяется под действием измеряемой величины. Изменение частоты может происходить: а) при воздействии температуры, которая влияет на геометрические размеры, плотность и, главным образом, на упругие свойства кварца; б) под действием механических напряжений в резонаторе или его деформации, также вызывающих изменение h, р и п; в) при присоединении дополнительной массы к резонатору, изменяющей его толщину h и среднюю плотность р. Соответственно различают термочувствительные, тензочувствительные и массочувствительные пьезорезонаторы. Кроме этого, используются пьезорезонансные датчики с амплитудным выходом. В этих датчиках, работающих на частоте, близкой к резонансной, при изменении акустических потерь изменяется амплитуда колебаний. Вопросы теории и расчета, а также ряд конструкций пьезорезо- нансных частотных датчиков разработаны группой сотрудников под руководством В. В. Малова [3].
При построении пьезорезонансного датчика очевидны требования, предъявляемые к пьезорезонатору: высокая добротность, высокая чувствительность к измеряемой величине, малая чувствительность к дестабилизирующим факторам и возможность возбуждения колебаний только на одной частоте, т. е. моночастотность. Эти требования обеспечиваются в первую очередь выбором типа среза пьезоэлемента и типа возбуждаемых в пьезоэлементе колебаний. Действительно, если рассмотрим пластину У-среза, то при приложении поля в направлении оси У в ней (см. матрицу пьезомодулей) возникают деформации е5 и ес, деформирующие пьезоэлемент в плоскости xz (деформация сдвига вдоль грани) и в плоскости ху (деформация сдвига по толщине). Однако геометрические размеры, определяющие резонансную частоту, в этих случаях различны. Собственная частота колебаний сдвига вдоль грани значительно ниже частоты колебаний сдвига по толщине, и благодаря этому условие моночастотности соблюдается удовлетворительно. В управляемых пьезорезонаторах чаще всего используются именно колебания сдвига по толщине (хотя возможны и другие типы колебаний), так как при этом типе колебаний колебательная энергия концентрируется в подэлектродной области пьезоэлемента. Безэлектродные периферийные области оказываются практически свободными от упругих колебаний, что позволяет осуществлять крепление пьезоэлемента без заметного ухудшения добротностей. Ослабление амплитуды колебаний при p7i7(pfr) = 0,02 (р' и Ь! — плотность и толщина электрода, р и h — плотность и толщина пьезоэлемента) в точке, удаленной от края электрода на 15ft, составляет не менее 40 дБ. Еще большего эффекта локализации энергии можно добиться при применении линзового резонатора.
Изменением ориентации среза добиваются определенных свойств пьезорезона- тора. Рассмотрим это на примере термостабильных срезов. Для резонатора К-среза с колебаниями сдвига по толщине частота резонанса определяется как f =
V^CnJp
~ 2h ' ГДС сбс — компонента упругости, равная отношению сдвигового напряжения а„ к вызываемой им деформации сдвига ев, т. е. св6 — ас/е6. Если повернуть К-срез относительно кристаллографических осей, то компонента упругости с'в8 будет иной, нежели компонента с6с. Упругость является тензором четвертого ранга, и компонента с'т может быть определена аналогично тому, как выше определялся пьезомодуль при повороте X-среза кварца.
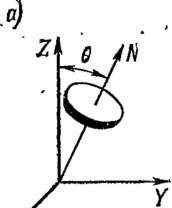
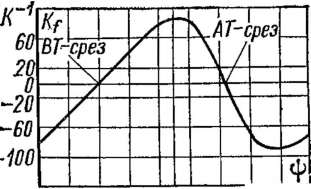
Коэффициент См — c6fl cos2 -ф + си sin® tj? 4- с14 sin 2\Jj, где 6 ~ (90 — -ф)— угол между осью Z и нормалью Л/ к плоскости пьезоэлемента (рис. 6-10, а). Температурные коэффициенты модулей упругости, входящие в выражение для cjc, вследствие анизотропии кварца имеют разные значения и знаки, а именно Кс = 178-10~6
Кг — —177- Ю~е /<"1; К
|
-Ж-70-50-30-М010 30 50 70 90°
Рис. 6-10
Можно, таким образом, найти ориентацию *ф, при которой коэффициент Kf —
«К, — ^^h 553 На рис. 6-10, б представлена кривая зависимости К —
сс f
| 10МО""6 К'К |
| Bad сверху |
| РЧ | Сч | ||
| Т0 | |||
| дч | |||
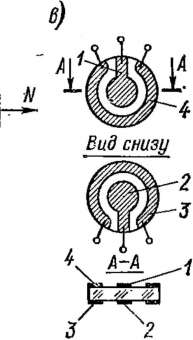
| Рис. 6-1! Термочувствительные пьезо резонансные датчики. Конструкция кварцевого термодатчика приведена на рис. 6-11, а, В миниатюрном металлическом герметизированном баллоне (диаметр 6—8 мм) размещен линзовый кварцевый резонатор укрепленный, как на растяжках, на токоподводах 2 и 3. Для уменьшения тепловой инерционности баллон заполнен гелием, обладающим хорошей теплопроводностью. Выпускаются также датчики с резонаторами в стеклянных вакууми- рованных баллонах. Эти датчики имеют большую инерционность, но более высокую временную стабильность и разрешающую способность. |
«ф (Ф). Срезы, которым соответствует Kf~0 (-ф— —49° и ф= +35°), получили название ВТ- и AT-срезов. В рассмотренном примере предполагалось, что модули упругости линейно зависят от температуры. На самом деле это не так* поэтому равенство Kf= 0 имеет место только в относительно узком диапазоне температур.
На рис. 6-11, б представлена структурная схема датчика, она включает в себя генератор Г/ с кварцевым термочувствительным резонатором, генератор стабильной частоты Г2, цепь разности частот РЧ, делитель частоты ДЧ и счетчик Сч с цифровой индикацией. Рабочий температурный диапазон датчиков составляет от —80 до +250 °С и может быть расширен при увеличении погрешности линейности.
Рабочие частоты термочувствительных резонаторов лежат в диапазоне 1—30 МГц, используются колебания как на основной частоте (1—10 МГц), так и на третьей и пятой гармониках (5—30 МГц).
В качестве термочувствительных резонаторов применяются резонаторы У-среза, ЛС-среза и LC-среза. Коэффициенты термочувствительности для этих срезов, соответствующие уравнению преобразования
/ = М 1+Kl (в-в0) + /(2<в~во)2 + Кз(в-во)3],
приведены в табл. 6-3.
В зависимости от собственной частоты резонатора /0 и типа среза термочувствительность датчиков составляет S© — Д//ДО = 20 -т- -ь 2850 Гц/К.
Порог чувствительности датчиков в основном определяется кратковременной нестабильностью резонаторов и построенных на их
основе генераторов и по приводимым в литературе данным составляет 10"4—10~6 К при измерениях в области низких температур.
Основными причинами погрешности термодатчиков являются временная нестабильность, «гистерезис», выражающийся в «неприходе» на начальную частоту после температурного цикла и оцениваемый значением порядка Ю~2 К при циклах, соответствующих рабочему диапазону, и повышение температуры (перегрев) резонатора, зависящее от мощности, выделяемой в цепи возбуждающих электродов Для разных типов датчиков повышение температуры на единицу мощности колеблется в пределах 0,05—I К/мВт. Для уменьшения систематической составляющей погрешности перерева необходимо уменьшить мощность возбуждения, для уменьшения случайной составляющей мощность возбуждения должна стабилизироваться.
Таблица 6-3
|
Подогревные термочувствительные резонаторы конструктивно объединяют пьезоэлектрический резонатор и дополнительный электрона- греватель и могут быть принципиально использованы как для преобразования в температуру и измерения непосредственно мощности нагревателя, так и для измерения любой из величин, определяющих температуру при постоянной мощности нагревателя, т. е. могут приме
няться в преобразователях тока, напряжения или мощности, а также в датчиках газоанализаторов, термоанемометров, вакуумметров (см. гл„ 11).
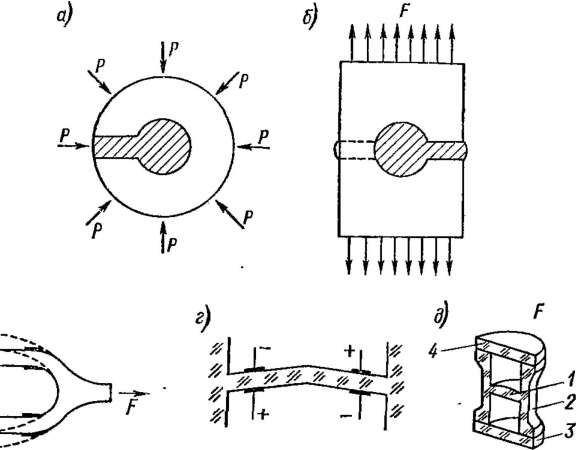 Рис. 6-12
Рис. 6-12
|
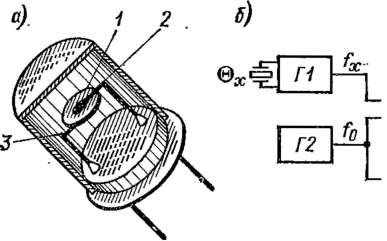
Конструкция подогревного пьезорезонатора, предложенного Э. А. Кудряшовым и использованного им в высокоточных квадраторах цифровых ваттметров и вольтметров, показана на рис. 6-11, е. В центре дискового резонатора У-среза диаметром 5 мм и толщиной 75 мкм напылены на нижней и верхней стороне золотые электроды возбуждения / и 2, а по периферии напылены электроды нагревателей 3 и 4 из нихрома. Сопротивление нагревателей 100 Ом, номинальный
е)
ток подогрева 15—30 мА. Крутизна преобразования мощности в частоту 1,5 МГц/Вт, рабочая частота 30 МГц.
Тензочувствительные пьезорезонансные датчики- В качестве тензочувствительных резонаторов применяются пьезоэлементы тем- пературно-независимого АТ-среза, в которых используются колебания сдвига по толщине и колебания изгиба, так как только для этих типов колебаний удается решить проблему развязки между колеблющейся частью резонатора и конструктивными элементами, через которые передается механическая нагрузка. Схематические конструкции и схемы нагружения тензочувствительных пьезорезонаторов показаны на рис. 6-12.
В резонаторах (рис. 6-12, а и б) используются колебания сдвига по толщине, поэтому закрепление резонатора и передача усилий могут осуществляться по свободной от колебаний периферии. Резонаторы подобного типа реализуются на диапазон частот 0,3—100 МГц, имеют толщину 0,05—5 мм при поперечных размерах 3—30 мм, относительное изменение частоты при номинальной входной величине Д/// = 0,1-4-
В резонаторах (рис. 6-12, в) используются изгибные колебания, которые возбуждаются системой из четырех электродов, обеспечивающей противоположные по знаку сдвиговые деформации так, как показано на рис. 6-12, г. Так, если при положительном потенциале на верхнем электроде происходит в надэлектродной области сдвиг «вправо», то при отрицательном потенциале — «влево» и пластина изгибается. Деформации, вызываемые в ножках «камертона» колебаниями верхней и нижней пластин, взаимно гасятся, так как пластины перемещаются в противофазе. Резонаторы с изгибными колебаниями реализуются на диапазон частот 1—100 кГц, но имеют меньшую жесткость и, следовательно, большую чувствительность, чем резонаторы с колебаниями сдвига; относительное изменение частоты достигает значений Д/// = 10 ч- 20%.
Метрологические возможности датчиков сил, давлений, ускорений в значительной степени определяются гистерезисом и ползучестью, вызванными неидеальностью самого упругого элемента, соединительных элементов и элементов передачи силы, а также дополнительными механическими напряжениями, которые могут возникнуть в материале резонатора при изменении температуры вследствие неравных температурных коэффициентов линейного расширения материалов. Проблема решается' наилучшим образом, если датчик представляет собой монолитный кристаллический блок, однако такая конструкция приводит к технологическим трудностям. Монолитная конструкция датчика гидростатического давления в диапазоне до 70 МПа фирмы «Хьюлетт—Паккард» показана на рис. 6-12,д.
Основу датчика составляет линзовый резонатор, выполненный в виде перемычки 1 в кварцевом цилиндре 2. Для герметизации применены крышки 3 я 4 также из кварца, ориентированного относительно кристаллографических осей идентично с цилиндром, что позволяет полностью устранить термонапряжение. Измеряемое давление создает всестороннее сжатие цилиндра и плоское сжатие перемычки. Кварцевый блок расположен в цилиндре, заполненном жидкостью, на которую через мягкую мембрану передается давление внешней среды. Применяется двойное термостатирование блока, обеспечивающее стабилизацию температуры ± 0,05 °С. Начальная частота резонатора 5 МГц (третья гармоника), добротность Q = 106, чувствительность 5 = 2-10~4 Гц/Па. В приборе предусмотрен умножитель частоты на 66, порог чувствительности при времени измерения 10 с ДР = 7 Па (10~7 предела измерения).
В заключение следует сказать, что лучшие линзовые тензочувстви- тельные резонаторы характеризуются следующими параметрами: номинальным изменением частоты Д/7/ = (0,5 ч- 10) 10~3, годичной нестабильностью частоты КГ7—10~9, кратковременной нестабильностью частоты 10~9—10~10, температурным коэффициентом частоты 10~6—1СГ8 К"1, температурным коэффициентом тензочувствительности 1СГ5 К"1, что позволяет прогнозировать разработку на их базе датчиков акселерометров, манометров, динамометров с погрешностью, оцениваемой значениями порядка 10"4, что значительно превышает точность современных приборов.
Масс-чувствительные пьезорезонансные датчики» Масс-чувстви- тельные резонаторы выполняются из тонких пластин или линз кварца темпер ату рно-независимого АТ-среза. В резонаторах возбуждаются колебания сдвига по толщине. Присоединяемая масса может наноситься с одной или с двух сторон как на электроды, так и на периферию резонатора. Наращивание массы, т. е. процесс сорбции вещества, может происходить по-разному и носить как необратимый, так и обратимый характер. Например, при отработке технологии процессов напыления в установке заподлицо с поверхностью, на которую производится напыление, помещается пьезорезонатор-толщиномер, позволяющий непрерывно контролировать процесс по изменению частоты пьезорезонатора в зависимости от толщины напыленной на него пленки. В гигрометрах и газоанализаторах пьезорезонаторы покрываются специальными сорбционными покрытиями, удерживающими исследуемое вещество. Так, измерительный резонатор гигрометра покрывается тонкой (3-1СГ7 мкм) пленкой окислов кремния. После измерения резонатор может быть «высушен», т. е. происходит десорбция вещества.
Связь частоты с толщиной hr и плотностью р' присоединяемого материала определяется в первом приближении формулой А/// = = — p'h,'/(р/г), где р и h — плотность и толщина пьезоэлемента. Если предположить, что исследуемые вещества сорбируются по всей поверхности дискового резонатора, то из этой формулы следует Д/// — = —А т/т, где т — масса резонатора, и очевидно, что относительное приращение массы может регистрироваться с тем же разрешением, что и относительное изменение частоты, т. е. 10г6—КГ7. Для кварцевых резонаторов толщиной h — 0,1 мм минимальные регистрируемые приращения массы на единицу поверхности Ат = (10~6 10"') рh = — (10~6 10~7) 2,65-0,01 = 2,65 (10~8 ч- КГ») г/см2. Однако такая высокая разрешающая способность может быть реализована только при термостабилизации резонаторов, на уровне dh0,l °С, так как для резонаторов АТ-среза ТКЧ составляет примерно 2 -10~6 К-1. Максимальная присоединяемая масса не должна превышать 2-10"3 г/см2, и толщина пленок должна быть не более 1—2 мкм, в противном случае резко падает добротность резонатора, что'приводит к нестабильности и большой погрешности измерения.
6-4. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ! ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛН
Поверхностные акустические волны (ПАВ) находят широкое применение при разработке фильтров и линий задержек, применяемых в радиотехнических устройствах. В последнее время ПАВ используются также при разработке измерительных пр еобр азовател ей.
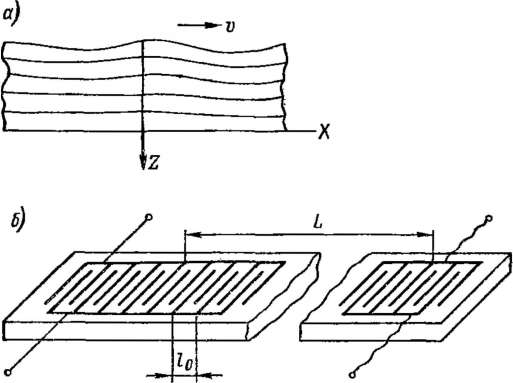
Известно несколько видов ПАВ, наиболее часто на практике применяют волны Релея. Смещение частиц твердого тела при распространении волны Релея в направлении оси X иллюстрируется рис. 6-13, а. Как видно из рис. 6-13, а, волны распространяются вблизи границы твердого тела и затухают почти полностью на расстоянии z от поверхности, примерно равном длине волны X. Одной из основных причин возрастающего интереса к ПАВ является именно сосредоточенность энергии в топ
ком слое, так как благодаря этому к технологии изготовления ПАВ-элемента предъявляется лишь одно требование — тщательная обработка рабочей поверхности, по которой распространяется акустическая волна.
Для возбуждения ПАВ на поверхность пьезоэлемента наносятся гребенки встречно^ включенных электродов (рис. 6-13,6), представляющие собой встречно- штыревой преобразователь (ВШП), имеющий шаг 10 — Я. При подключении напряжения к электродам ВШП под ними вследствие обратного пьезоэффекта происходят смещения частиц и возникает ПАВ, распространяющаяся в обе стороны. Если при этом длина волны совпадает с шагом ВШП, то вследствие суперпозиции колебаний, возникающих под каждой парой электродов, суммарная энергия ПАВ достигает максимума; если длина волны не совпадает с шагом ВШП, энергия ПАВ уменьшается и при определенном соотношении между К и /0 волна за пределами ВШП может полностью погаситься.
Для приема энергии ПАВ используется второй ВШП, также имеющий шаг, равный длине волны. На электродах приемного ВШП вследствие прямого пьезоэффекта возникают заряды и появляется напряжение. Линия задержки состоит из входного и выходного ВШП. В первом приближении оба ВШП можно рассматривать как локальные электроды, расположенные на расстоянии L, равном расстоянию между геометрическими центрами ВШП. Время задержки т равно времени прохождения акустической волны между ВШП, т. е. т — L/v, где v = Y^iflP— скорость
распространения ПАВ; Е-гу — константа упругости и р — плотность материала.
| I |
В кварце К-среза скорость распространения ПАВ равна 3159 м/с; таким образом, при L — 10 мм время задержки составляет около 3 мкс. Длина волны h определяется скоростью распространения v и частотой возбуждения волн и составляет
ib
Ux
X — v/f. Современная технология обеспечивает возможности создания ВШП с шагом до Iq = 10 мкм; таким образом, рабочие частоты ПАВ могут лежать в диапазоне до 300 МГц.
ПАВ-структура может быть использована в качестве частотозадающего элемента автогенератора (рис. 6-13, е); при этом, как следует из условия баланса фаз (фазовыми сдвигами в электрических цепях пренебрегаем), на длине L должно укладываться целое число волн. Фазочастотная характеристика линин задержки определяется как ф (со) = —сот. Значение эквивалентной добротности определяется как
<Ээкв = -^г I \ и составляет Q3KB = лсо0т/./(2Л). Длина L ограничена раз-
I } 0(0 I© = (ce
мерами ПАВ-структуры и затуханием энергии ПАВ и не превышает L — 500 А; таким образом, добротность равна Q3KB «Ю3.
Изменение времени задержки ПАВ-структуры под воздействием внешних факторов используется в измерительных преобразователях с частотным выходом. При изменении т относительное изменение частоты генератора составляет Дсо/о)0 = = —Дт/т0.
| Рис. 6-13 |
Изменение времени задержки т — Lfv определяется изменением длины L и фазовой скорости v и равно Лт/т = AL/L — АЕцЦ2Еу) + Ар/(2р).
Изменение времени задержки может происходить при механических деформациях ПАВ-структ'уры, под воздействием температуры, при нагруженин поверхности тонкими пленками (толщина пленки V <0,1 при изменении зазора б между поверхностью распространения ПАВ и токопроводящим экраном (б < Я). Соответственно на базе ПАВ-структур могут быть созданы преобразователи для измерения механических величин (Лт/т — до 1%), температуры (Дт/т— до 1%), микроперемещений, для микровзвешивания и исследования параметров топких пленок (Дт/т — до 10%). При бесконтактной системе возбуждения ПАВ-преобразователи могут быть использованы также для измерения перемещения объекта, [вызывающего перемещение одного из ВШП и приводящего к изменению L.
Возможности построения на ПАВ-структурах преобразователей для измерения механических величин подробно исследованы в МИФИ В. М. Макаровым и В. В. Маловым, ими же разработан ряд преобразователей для измерения сил, давлений и ускорений. Схематическая конструкция акселерометра на ПАВ-структуре показана на рис. 6-14. На консольной балке 2 закреплена инерционная масса 3. Балка выполнена из кварца, и на верхней поверхности балки методами планарной технологии нанесены ВШП с числом электродов NBC3g =150 и ^присм= 50. На пластине 1 размещены электронные элементы измерительной цепи. Собственная частота балки /0 ^ 750 Гц, чувствительность акселерометра S 0,1 (кГц-с2)/м, предел измерения до 350 м/с2, погрешность у ^ 0,5'о.
ГЛАВА СЕДЬМАЯ
Date: 2015-09-18; view: 647; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |