Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 5 page
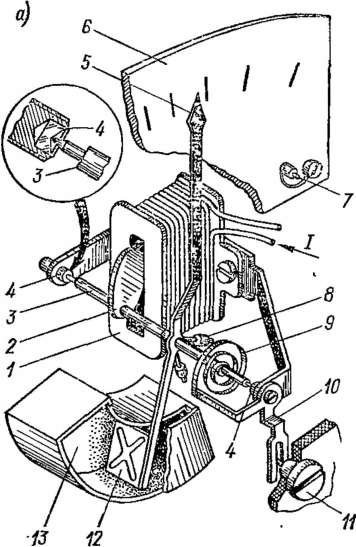
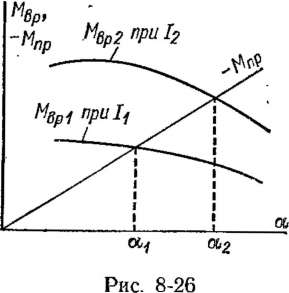
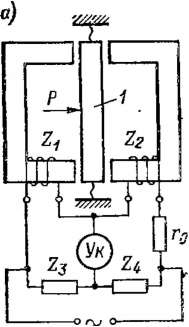
подвижная часть поворачивается и закручивает пружину 9 (рис. 8-25, а). Внутренний конец пружины закреплен на.оси, а наружный — на неподвижной части ИМ. Момент спиральной пружины возрастает прямо пропорционально углу а поворота подвижной части, т. е. Мпр = ^сс, где W — удельный противодействующий момент. Поэтому при токе /i подвижная часть отклонится на угол аг (рис. 8-26), при котором Мвр1 — Л4пр, а при токе /2— на угол а2 > ах.
|
В магнитоэлектрических ИМ противодействующий момент создается двумя растяжками 5, которые выполняют одновременно две функции, заменяя пружину и ось.
| г) |
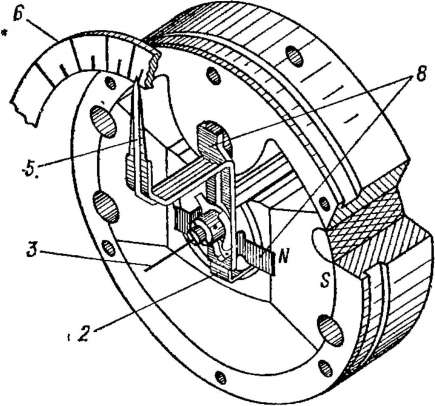 Рис. 8-25, в, г
Рис. 8-25, в, г
|
Подвижная часть любого ИМ представляет собой колебательную систему (см. § 2-4, 2-5), вследствие чего после включения ИМ, а также при изменениях входной величины подвижная часть будет совершать затухающие колебания около положения равновесия. Чтобы увеличить затухание и уменьшить время установления показаний, в ИМ применяются специальные устройства — успокоители. В электромагнитном ИМ, приведенном на рис. 8-25, а, в качестве успокоителя применено крыло /2, которое при повороте подвижной части расходует энергию, перегоняя воздух в камере 13 из одной части в другую. Такой же воздушный успокоитель использован в электродинамическом ИМ. В ферродинамическом механизме применен магнитоиндук- ционный успокоитель, представляющий собой тонкое крыло 12 из ал ю-
мини я, перемещающееся в зазоре постоянного магнита 13, показанного дополнительным видом (рис. 8-25, в). В крыле индуктируются токи, которые, взаимодействуя с полем постоянного магнита, тормозят движение крыла.
В магнитоэлектрическом ИМ успокоителем служит каркас рамки и, кроме того, сама обмотка, если она включена в измерительную цепь с конечным сопротивлением; поэтому специального успокоителя не требуется.
К вспомогательным деталям ИМ относятся токоподводы к рамке, противовесы, пружинящие стрелочные упоры, корректор. Токопод- водами обычно служат пружины или растяжки, поэтому, по крайней мере, одна из них должна быть изолирована от корпуса. Противовесы 8 в виде стержней с гайками предназначены для уравновешивания подвижной части, т. е. для перемещения ее центра тяжести на ось вращения, так как в противном случае возникает дополнительный момент, вызывающий погрешность механизма. Пружинящие упоры служат для ограничения перемещений подвижной части при ее отклонении за пределы шкалы. Корректор, предназначенный для установки подвижной части в нулевое положение, состоит из поводка 10, к которому прикреплен внешний конец пружины 9У и винта 11 с эксцентрично расположенным пальцем, который входит в прорезь поводка.
Как видно из рассмотрения конструкций, ИМ содержит следующие основные узлы: устройство, создающее вращающий момент, зависящий от электрической величины; устройство, создающее противодействующий момент, зависящий от угла отклонения; отсчетное устройство, успокоитель и ряд вспомогательных деталей.
Погрешности ИМ. В измерительном механизме осуществляются этапы преобразования: преобразование тока во вращающий момент, преобразование момента в угол поворота подвижной части и преобразование угла поворота в отсчет по шкале прибора.
Каждый из этапов преобразования характеризуется своими погрешностями, совокупность которых определяет погрешность ИМ. Погрешность измерительного прибора обычно больше погрешности ИМ (исключение составляют миллиамперметры и ЭМ амперметры, для которых YnP " Уи.м)» так как в приборе имеется еще преобразователь измеряемой величины (напряжение, мощность, частота и т. д.) в ток.
Структурная схема ИМ представлена на рис. 8-27, а. На этой схеме указаны также основные составляющие погрешности нуля ИМ и основные причины погрешности чувствительности.
|
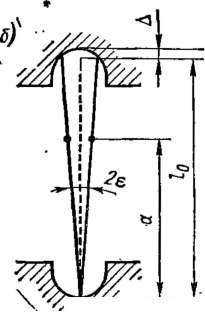
Погрешность преобразования угла поворота а в отсчет N по шкале, характеризуемого коэффициентом /<шк, определяется погрешностью отсчета (Даотсч), погрешностью* градуировки шкалы (Досгр), погрешностью от смещения градуированной шкалы при ее установке (Дауст) и погрешностью опрокидывания (Аа0пР) Для приборов, подвижная
часть которых закреплена на оси в кернах. Последняя составляющая иллюстрируется рис. 8-27, б, из которого видно, что при наличии зазора (около 20 мкм), необходимого, чтобы ось не защемило при температурных деформациях, ось при нормальной температуре занимает одно из двух крайних положений, наклоняясь от гипотетического
2 Ад
среднего положения на угол ея«±-р1/ -у R, где /0 — длина оси;
А — зазор и R — радиус закругления подпятника. При этом стрелка, условно показанная на рис. 8-27, б точкой и направленная перпенди-
| с |
а) да.
гр
^кМнеураВн
1/W
| Act |
| \rw |
| уст |
| Температура, Вибрация, Внешнее магнитное поле, собственное магнитное поле |
| А а. |
| Температура, усталость от нагрузок} старение -- |
| >олр |
ff(zrnfirecfi)j AM3t
|
Рис. 8-27
кулярно плоскости чертежа, смещается по шкале. Смещение равно Да ~ ±га, где а — расстояние от нижней опоры до стрелки. Соответствующий этому смещению угол поворота Ааопр = =hsa//CTp, где 4тр — длина стрелки.
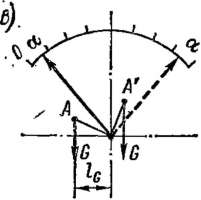
Погрешность преобразования вращающего момента определяется как возможной нестабильностью противодействующего момента W, так и действием «паразитных» моментов. Эти моменты вызываются трением в опорах (ДЛ4тр), если прибор на кернах; неуравновешенностью подвижной части (ДЖнеуравн), если центр тяжести горизонтально расположенной подвижной части не совпадает с осью прибора, как показано на рис. 8-27, в (эта составляющая меняется при повороте подвижной части, т. е. вдоль шкалы прибора, так как центр тяжести перемещается из точки А в Л'), и дополнительными электромагнитными силами, которые можно определить для каждого конкретного случая на основании уравнений, приведенных в § 8-1. Например, для
ферродинамического ИМ, кроме основного момента, могут действовать следующие составляющие сил: электромагнитная, стремящаяся развернуть рамку так, чтобы ее индуктивность была максимальной, индукционная — при работе механизма на переменном токе и наличии индуктивного сопротивления и емкости в цепи рамки, магнитоэлектрическая, вызванная воздействием магнита успокоителя на ферромагнитные элементы подвижной части. Погрешность, вызванная 2 А/И', будет, очевидно, тем больше, чем меньше вращающий момент механизма.
Точность преобразования тока во вращающий момент определяется главным образом стабильностью характеристик магнитной цепи преобразователя, эта погрешность для МЭ преобразователя подробно рассмотрена в § 8-4.
Динамические свойства измерительных механизмов определяются
собственной частотой подвижной части /и u = ^VrW/J, где J — момент инерции подвижной части. Время установления показаний даже при оптимальном успокоении не может быть меньше периода собственной частоты, и поэтому оно тем меньше, чем выше собственная частота.
Вращающий момент ЭМ, ЭД и ФД измерительных механизмов содержит, кроме постоянной составляющей (см. рис. 8-6), переменную составляющую, частота которой в два раза выше частоты входного тока. ИМ должен быть фильтром для этой составляющей, поэтому рабочий частотный диапазон ИМ ограничен снизу частотой /изм ^ ^(5 4- 10) /илй. При меньших частотах стрелка заметно Колеблется вокруг некоторого среднего положения.
Вращающий момент магнитоэлектрических ИМ пропорционален току. В этом случае угол а (имеется в виду шкала с нулем посредине) пропорционален мгновенному току, пока частота изменения тока намного меньше собственной частоты ИМ, т. е. fmzii ^ 0,1 fll M. Если частота измеряемого тока повышается, отклонение подвижной части увеличивается до максимального при /изм = /и>м (при степени успокоения меньше единицы), а затем уменьшается и, наконец, при /изм
f„м наблюдается просто дрожание стрелки, стоящей на нулевой отметке;
Область применения и технические характеристики различных типов ИМ представлены в табл. 8-2. Электромагнитный ИМ (см. рис. 8-25, а) не имеет токоведущих частей на подвижной части, что повышает технологичность и надежность прибора. Неподвижная катушка может быть намотана достаточно толстым проводом, и поэтому
1 dL,
ЭМ амперметры не содержат шунтов. Угол отклонения а = 2w ^ да
принципиально нелинейно зависит от тока. Некоторая линеаризация шкалы достигается специальным выбором формы сердечника. Магнитное поле электромагнитного ИМ относительно слабое, так как силовые линии замыкаются в основном по воздуху. Поэтому ЭМ преобразователь обычно помещается в экран, защищающий его от внешних магнитных полей. Вращающий момент ЭМ преобразователя также сравнительно мал, так как мала его индуктивность L = ^2/(ZM<B03fl + + ZM серд) и ее производная dL!da\ поэтому увеличение момента до
Таблица 8-2
|
| Примечание. В формулах для переменного тока / —действующий ток, я))— угол сдвига между токами h и /2. |
нужного значения (5—20 мкН-м) достигается увеличением тока и числа витков, т. е. потребляемой мощности. Электромагнитные ИМ применяются главным образом в щитовых амперметрах.
Электродинамический ИМ вообще не содержит ферромагнитных элементов. Благодаря этому его момент Мвр = IJ^dM^lda определяется чисто геометрическими параметрами катушек и преобразование тока в момент осуществляется с очень высокой точностью. Но момент, создаваемый электродинамическим ИМ, очень мал по значению, поэтому существенно сказываются на точности преобразования все «паразитные» моменты (рис. 8-27, а). Для того чтобы их свести к минимуму, все детали ИМ выполняют из неферромагнитных материалов, а детали крепления катушек — даже из непроводящих материалов, чтобы исключить их влияние на взаимоиндуктивность. Подвижная часть крепится, как правило, на растяжках. Для защиты от внешних магнитных полей ЭД механизм закрывается экраном, который должен быть достаточно удален от катушек, чтобы не влиять на их взаимоиндуктивность. Приборы с ЭД механизмами имеют большие габариты и потребляют большую мощность. ЭД механизмы применяются в лабораторных высокочастотных приборах переменного тока.
Ферродинамические ИМ, не отличаясь по принципу действия от электродинамических, имеют совершенно другое конструктивное вы
полнение, так как в них магнитная цепь выполняется из ферромагнитного материала. Введение ферромагнетиков увеличивает погрешность преобразования токов в момент, но позволяет существенно увеличить при том же потреблении мощности сам момент и тем самым снизить погрешности от «паразитных» моментов. Ферродинамические ИМ применяются в щитовых и самопишущих приборах, где моменты трения в опорах особенно велики.
ЭД и ФД механизмы являются множительными преобразователями и могут в зависимости от схемы включения их обмоток измерять ряд электрических величин: ток, напряжение, мощность, частоту, угол сдвига между двумя напряжениями.
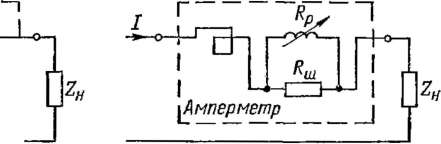
| I ' ' I Миллиамперметр \ |
| ПвР 1 да Яш+Rn |
| _ 2 дИ12- р- 1 ~ШГ |
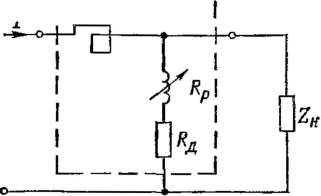
ГВольтметр f
I_________ '
да RA+RP
Рис. 8-28
Некоторые схемы включения и формулы, связывающие вращающий момент с измеряемой величиной, приведены на рис. 8-28.
Магнитоэлектрический ИМ обладает рядом преимуществ по сравнению с другими ИМ, а именно: сильное магнитное поле, создаваемое постоянным магнитом, и, следовательно, относительно большие вращающие моменты, малое потребление и инвариантность к внешним магнитным полям, отсутствие успокоителя в виде специального конструктивного элемента и, следовательно, при световом отсчете почти симметричная подвижная часть, линейная зависимость между углом поворота и током и, наконец, высокая точность.
| j Ваттметр |
В развитии современного приборостроения намечается тенденция к унификации электромеханических измерительных приборов путем использования во всех приборах одного типа механизма — магнитоэлектрического с дополнением его соответствующим электронным преобразователем измеряемой величины в постоянный ток.
8-6. ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Типы индуктивных преобразователей. На рис. 8-29, а изображен наиболее распространенный преобразователь с малым воздушным зазором 6, который изменяется под действием измеряемой величины Р. Рабочее перемещение в преобразователях с переменным зазором составляет 0,01—10 мм. В этих преобразователях могут быть использованы ферритовые элементы 2 (рис. 8-29, б), выпускаемые промышленностью; для изготовления подвижного сердечника 1 используется основание такого же элемента 2, стенки которого сошлифовываются. На рис. 8-29, в изображен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 7, внутри которой помещен стальной сердечник 2. Перемещение сердечника вызывает изменение индуктивности катушки. Этот тип преобразователя применяется для измерения значительных перемещений сердечника (10—100 мм).
s) 1
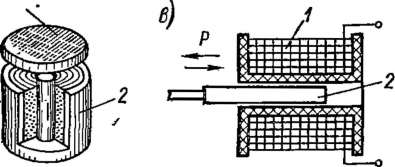 Рис. 8-29
Рис. 8-29
|
Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1—5 В-А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления. Лишь при малогабаритных преобразователях приходится прибегать к включению усилителя.
Электрическое сопротивление индуктивного преобразователя (рис. 8-29, а), если считать, что все сопротивление утечки Rn включено параллельно зазору, выразится формулой
| ЖЕ |
7 - Р Mi _ о I; юзу2
| ш + |
| Mo s |
| и |
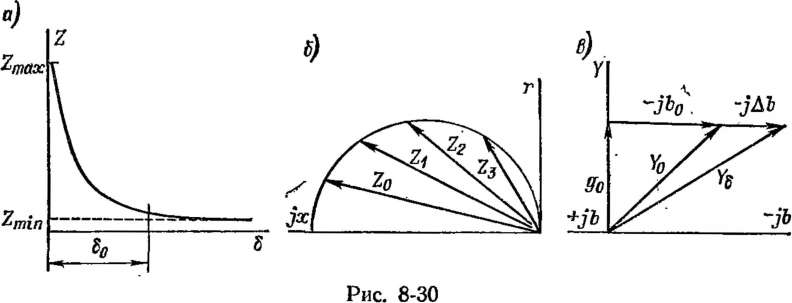
| V(Ru+Rd\RyT? + Xi Из этой формулы видно, что Z связано с длиной 6 воздушного зазора зависимостью, близкой к гиперболической. С увеличением зазора и, следовательно, сопротивления R0 полное электрическое сопротивление уменьшается так, как показано на рис. 8-30, а: от Zmax = — \Ro + i<ow2I(RM + jXj[ при бесконечно малом зазоре до ZmiB = |
£ — /<0-ь/ р; v 1 djd — ko-w -
f Ям-НХм+ЯбЧЯут"
= | Ro + faw2/(Rm 4- jXw + RyT) | при бесконечно большом зазоре. Линейный участок характеристики преобразователя с начальным зазором 60 ограничен значением Д6, равным (0,1 -г- 0,15) 60. Относительное изменение сопротивления AZ/Z из-за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления магнитопровода в 2—5 раз меньше относительного изменения зазора ее = Д6/60. Кроме того, следует обратить внимание на то, что при изменении сопротивления зазора Rб изменяется не только реактивная X = сош2 (RM + Я5 || RyJ/Z^ но и активная R = R0 + оw2XJZl составляющая сопротивления Z, и вектор сопротивления изменяется так, как показано на рис. 8-30, б.
|
Расширения линейного участка характеристики можно добиться, если выбрать в качестве выходной величины преобразователя не сопротивление Z, а проводимость У, которая (если пренебречь сопротивлением R) связана с изменением зазора как
Y 5=5 Z e я (^м + + ((^ут)-
Изменение проводимости при относительном изменении зазора = = М/60 составит
А = С+ЧI куг)[>+('-и6)(Лв.|лут)]
и будет почти линейно связано с изменением зазора, в особенности при RyT Уравнение можно представить как
СОW2! СОW2 ' сош2 *
и очевидно, что в векторной диаграмме (рис. 8-30, е) приращению проводимости ДЬ в комплексной плоскости соответствует вектор, параллельный мнимой оси и сохраняющий свое направление независимо ни от размера рабочего зазора 6, ни от частоты питающего напряжения (при изменении со одинаково изменяются обе составляющие проводимости).
Существенно уменьшить погрешности и увеличить линейный участок характеристики позволяет применение дифференциальных пре
образователен (см. § 3-2). Поэтому в практике индуктивные преобразователи всегда выполняются дифференциальными. На рис. 8-31, а показана схематическая конструкция преобразователя для измерения малых перемещений, на рис. 8-31, б — для измерения больших перемещений. В том и другом преобразователе происходит перемещение сердечника 1 и при перемещении в 'направлении стрелки — увеличение сопротивления Z2 и уменьшение сопротивления Zx.
Измерительные цепи индуктивных преобразователей. Наиболее распространенной измерительной цепью является неравновесный измерительный мост, в два пле- б) ча которого включены две по
ловины дифференциального преобразователя (рис. 8-31). Как было показано выше, с измеряемой величиной линейно связана проводимость преобразователя. Поэтому оптимальным (см. § 3-2) является включение преобразователей параллельно источнику и питание моста от источника напряжения. Уравновешивание моста в начальном положении, т. е. при отсутствии входной величины (технологически трудно получить точное равенство сопротивлений двух половин преобразователя), производится по двум составляющим — изменением сопротивления нерабочего плеча Z3 или Z4 и изменением сопротивления г0, включаемого в плечо, имеющее меньшее активное сопротивление. Частота и напряжение питания моста выбираются на основании соображений, изложенных в § 8-2. Если при А6 = 0 цепь была уравновешена, то при Д6 0 через указатель потечет ток, равный 1ук = UAY, где AY — приращение электрической проводимости преобразователя.
Ток /ук сдвинут по фазе относительно напряжения питания. Угол сдвига <р = 90°, если RyK 0, и ф — 0 при RyK -> оо; при согласовании сопротивления указателя с выходным сопротивлением моста ф = 45°. Это обстоятельство необходимо учитывать при наличии в измерительной цепи фазочувствительных устройств.
8-7. ТРАНСФОРМАТОРНЫЕ (ВЗАИМОИНДУКТИВНЫЕ)
ПРЕОБРАЗОВАТЕЛИ
|
| J1 | 1 t | Z; | У |
| Ш |
| Рис. 8-31 |
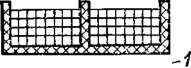
На рис. 8-32, а показан дифференциальный трансформаторный преобразователь с подвижным сердечником. Как видно из сравнения рис. 8-31, а и 8-32, а, конструкции магнитной цепи индуктивного и взаимоиндуктивного преобразователей одинаковы, отличаются они только числом обмоток. При центральном расположении сердечника ЭДС вторичных обмоток равны между собой и суммарная выходная
ЭДС Е2 равна нулю, так как обмотки включены встречно. При смещении сердечника ЭДС Е2 определяется по формуле
Ег = Еа-Е6 = /ош> = Jpgh (Zm6 - ZMO).
\ ЛМЙ б / ^мЛб
Полагая, что ZM6 = ZH + AZM, a ZMO = ZM — AZM, можно упростить это выражение:
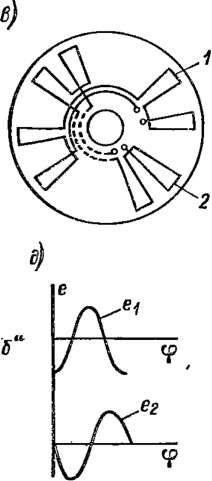
На рис. 8-32, б показан преобразователь угла поворота. Напряжение питания подводится к обмотке 1. Обмотка 2 в этом преобразовав теле выполнена в виде рамки, имеющей возможность поворачиваться в кольцевом зазоре магнитной цепи 4. При крайних положениях рамки (аг и а2) индуктированная в ней ЭДС £2 имеет максимальное значение.
|
По мере поворота рамки в горизонтальное положение ЭДС Е2 линейно уменьшается до нуля (рис. 8-32, е). При переходе рамки через горизонтальное положение фаза ЭДС Е2 изменяется на 180°. В тех случаях, когда хотят получить изменение ЭДС преобразователя от нуля до максимума при повороте рамки из одного крайнего положения аг в другое а2, последовательно с рамкой включают дополнительную обмотку 3. Зависимость ЭДС Е2у Ез и (Еъ + ^з) от угла отклонения рамки приведена на рис. 8-32, в.. Преобразователи подобного типа можно применять для измерения больших угловых перемещений, и конструктивно для этих целей можно использовать измерительные механизмы ферродинамических приборов. Поэтому и сами преобразователи иногда называют ферродинамическими.
Преобразователь (рис. 8-33, а) с распределенными магнитными параметрами предназначен для измерения больших линейных перемещений и состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки возбуждения 1 и подвижной обмотки 2. При перемещении обмотки 2 от положения 3 до положения 5 индуктированная в обмотке 2 ЭДС возрастает, причем зависимость приращения ЭДС от перемещения обмотки 2 оказывается практически линей- нои, если магнитное сопротивление участка 3—5 магиитопровода мало по сравнению с магнитным сопротивлением зазора. Преобразователи подобного типа относительно просто выполнить и с требуемой функциональной зависимостью, применив для этого профилированный магнитопровод (рис. 8-33, б). Неподвижные обмотки преобразователя соединены так, чтобы их потоки в магнитопроводе были направлены встречно. Тогда в положении 0—О ЭДС подвижной обмотки будет равна нулю. При смещении обмотки вправо или влево от нейтрали в ней наводится ЭДС, фаза которой отличается на 180°. Подробно вопросы расчета и конструирования преобразователей с распределенными параметрами и функциональных преобразователей рассмотрены в работах Л. Ф. Куликовского и его учеников.
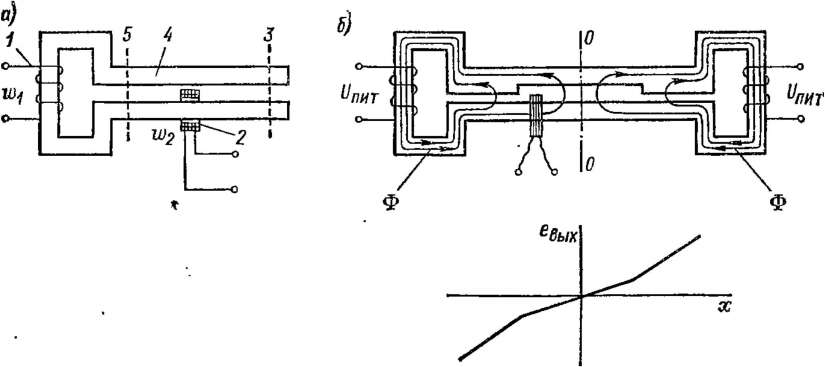 Рис. 8-33
Рис. 8-33
|
В трансформаторном преобразователе с подвижным сердечником необходимо обеспечить такой режим питания, чтобы МДС первичной обмотки, а следовательно, и ток первичной цепи не изменялись при перемещении сердечника. Для этого в одинарных преобразователях необходимо включить в первичную цепь высокоомный добавочный резистор, а в дифференциальных преобразователях — последовательно соединить первичные обмотки, сопротивления которых изменяются с обратным знаком.
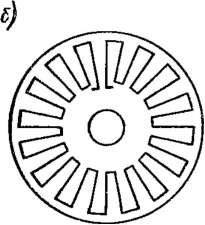
Индуктосины. Для точного измерения угла поворота применяются круговые индуктосины с печатными обмотками. Принцип действия кругового индуктосина иллюстрируется рис. 8-34. На торцевых поверхностях, обращенных друг к другу и разделенных малым воздуш- н/э1м зазором (0,1—0,2 мм) (рис. 8-34, а), ротор и статор несут печатные обмотки, имеющие вид радиального растра. Обмотка статора, к которой подводится напряжение питания высокой частоты (около 10 кГц), показана на рис. 8-34, б; обмотка ротора, в которой наводится ЭДС еВых> — на рис. 8-34, в. На рис. 8-34, г изображено сечение обмоток и магнитное поле статора, напряженность которого Иу меняется вдоль оси х. Максимальная ЭДС наводится в обмотке ротора, когда ее витки находятся под витками статора. При смещении обмотки на
угол (p,v — п/р> где р — число полюсных шагов статор ной обмотки, угол сдвига индуктированной ЭДС изменяется на 180°. Симметрия ЭДС, наводимых в обмотке ротора в положениях я и б, нарушается из-за того, что электромагнитную связь имеют не только радиалы-ю расположенные проводники обмоток, но и их лобовые части, расположенные по окружности. ЭДС, индуктируемая в лобовых частях обмоток, не зависит от углового перемещения обмоток и дает постоянное смещение. Для того чтобы это смещение исключить, применяется секционная обмотка, отдельные секции которой смещены относительно друг друга на угол nip и включены встречно, как показано на рис. 8-34, в. При таком включении ЭДС радиальных участков обмотки складываются, а ЭДС дуговых участков вычитаются.
|
|
| Витки статора |
| Витки ротора в |
| WVW* |
ч)
{///////////////////л
(1*00000000 fi О • О О О О ООО
Рис. 8-34
Для однозначного определения направления поворота подвижного диска в пределах одного периода повторения кривой ЭДС вторичная обмотка выполняется многофазной, в простейшем случае — двухфазной, как показано на рис. 8-34, в. Фазовые обмотки смещаются относительно друг друга на угол (2п + 1) л/(2р). Тогда при смещении ротора относительно некоторого положения, в котором ЭДС обмотки 1 считаем условно положительной, ЭДС ех и е2 в обмотках 1 и 2 вдоль угла поворота диска будут меняться так, как показано на рис. 8-34, д. Значение ег определяет угол поворота, а угол сдвига е2 относительно е1 определяет направление угла поворота. Выходной величиной индукто- сина может служить как ЭДС, индуктируемая во вторичной обмотке, так и ее фаза. Однако в том и другом случае измеряемое угловое перемещение не должно превышать полюсного деления, т. е. фдг = = ±п/р. Для того чтобы измерять большие углы поворота, индукто-
Date: 2015-09-18; view: 509; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |