Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Асинхронные машины
Холостой ход асинхронной машины.

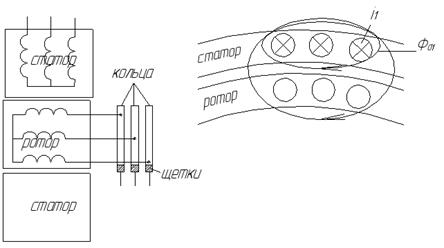
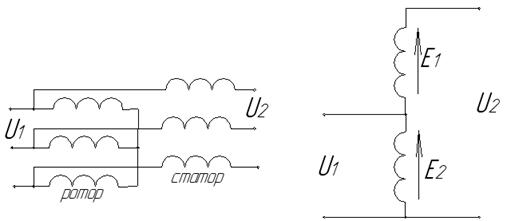
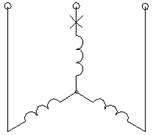
Асинхронная машина с фазным ротором:
Мы рассматриваем режим, когда ротор разомкнут  - заторможенная магнитная система.
- заторможенная магнитная система.
Под действием магнитного потока в первичной и вторичной обмотках будет индуктироваться ЭДС

 магнитный поток.
магнитный поток.
 число витков в фазе статарной обмотки.
число витков в фазе статарной обмотки.
 обмоточный коэффициент статорной обмотки.
обмоточный коэффициент статорной обмотки.
 частота питающей сети.
частота питающей сети.

Заторможенная асинхронная машина практически представляет собой трансформатор, у которого имеется воздушный зазор, поэтому можно ввести понятие коэффициента трансформации:
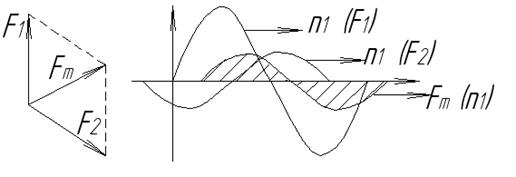
Режим работы под нагрузкой при заторможенном роторе.
 Под действием
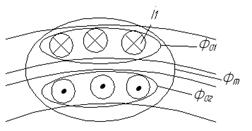
Под действием  в обмотке ротора будут протекать токи, которые создают магнитный поток, вращающийся в пространстве с частотой
в обмотке ротора будут протекать токи, которые создают магнитный поток, вращающийся в пространстве с частотой  .
.
Поток, создаваемый статарной обмоткой будет взаимодействовать с роторной обмоткой и получим результирующий магнитный поток. По аналогии с трансформатором можно записать:

Можно построить диаграмму:
Так же как у трансформатора вторичная обмотка приводится к первичной обмотке, т.е реальная вторичная обмотка заменяется фиктивной обмоткой, имеющей то же самое число фаз, витков, шаг обмотки, число пазов на полюс фазу, как и у первичной обмотки, для того, чтобы энергетические показатели остались без изменений, в реальные параметры вторичной обмотки вводятся поправочные коэффициенты.
 поправочный коэффициент по току.
поправочный коэффициент по току.
 число фаз первичной и вторичной обмоток (в случае короткозамкнутого ротора число фаз равно числу стержней).
число фаз первичной и вторичной обмоток (в случае короткозамкнутого ротора число фаз равно числу стержней).

 приведенные значения вторичной обмотки.
приведенные значения вторичной обмотки.
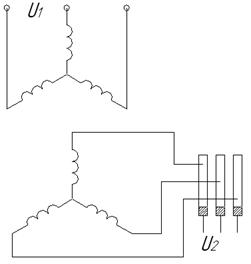
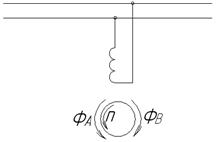
Рассмотренный режим применяется в индукционных регуляторах, который представляет заторможенную асинхронную машину с фазным ротором, у которой ротор может поворачиваться.
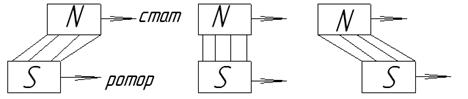
В случае подачи питания на обмотку ротора, образуется магнитное вращающееся поле, которое индуктирует в фазах статора и ротора ЭДС, в том случае, если пространственно оси фаз статора и ротора совпадают, ЭДС будут иметь одинаковое направление.
Если мы ротор повернем на угол  , диаграмма будет выглядеть так:
, диаграмма будет выглядеть так:
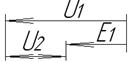
Применяется так же этот режим в фазорегуляторах, который представляет собой асинхронную машину. На статарную обмотку подается напряжение  . При повороте ротора изменяется фаза напряжения
. При повороте ротора изменяется фаза напряжения  , относительно напряжения фазы .
, относительно напряжения фазы .
Работа асинхронной машины при вращающемся роторе.
 , следовательно, в проводниках ротора будет создаваться ЭДС с частотой
, следовательно, в проводниках ротора будет создаваться ЭДС с частотой  .
.
 скорость, с которой поле пересекает проводники ротора.
скорость, с которой поле пересекает проводники ротора.

 скольжение.
скольжение.

 частота, когда ротор заторможен.
частота, когда ротор заторможен.

В машинах малой мощности скольжение достигает 20%, а в машинах большой мощности 1-4%.
Скольжение в номинальном режиме - 
Скольжение в заторможенном режиме - 


Скорость вращения намагничивающей силы ротора.
 скорость ротора.
скорость ротора.

Следовательно, скорость поля относительно ротора будет равна:
 поле ротора в пространстве вращается с той же скоростью, что и поле статора.
поле ротора в пространстве вращается с той же скоростью, что и поле статора.
Схема замещения асинхронной машины с вращающимся роторам.
Уравнение электрического равновесия для первичной обмотки:

Для вторичной обмотки:


 ротор закорочен.
ротор закорочен.


Из анализа полученного уравнения и уравнения трансформатора можно сделать вывод, что для анализа работы асинхронной машины с вращающимся ротором может быть применена схема замещения трансформатора, если во вторичную обмотку будет включено добавочное сопротивление:

Электрическая мощность, выделяемая в этом сопротивлении, будет равна механической мощности, развиваемой двигателем.
Т- образная схема замещения асинхронной машины с вращающимся роторам.
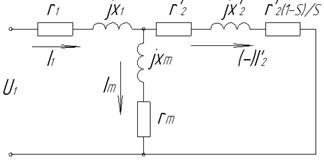
 главное индуктивное сопротивление обмотки статора.
главное индуктивное сопротивление обмотки статора.
 это сопротивление с определенным допущением можно считать сопротивлением, которое учитывает потери в стали.
это сопротивление с определенным допущением можно считать сопротивлением, которое учитывает потери в стали.
7 лекция.
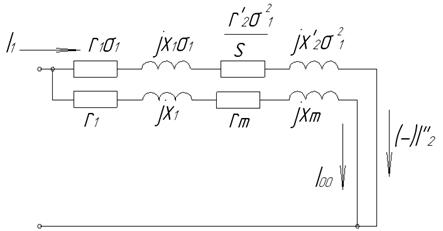
Г- образная схема замещения.
Т- образная схема неудобна для изучения режимов работы асинхронной машины, в связи с тем, что при изменении скольжения будут изменятся все три тока. И для решения этой проблемы была предложена Г- образная схема замещения, у которой намагничивающий контур вынесен на зажимы первичной цепи.
Намагничивающим называется контур, который образуется в Т- образной схеме, когда скольжение равно 0. (идеальный холостой ход).
Так как напряжение сети остается постоянным, то при изменении режима асинхронной машины будут изменятся только два тока -  , ток намагничивающего контура остается постоянным.
, ток намагничивающего контура остается постоянным.
В связи с преобразованием Т- образной схемы в Г- образную, вводится поправочный коэффициент из условия, что  .
.
Г- образная схема замещения:
 поправочный коэффициент.
поправочный коэффициент.
В том случае, если параметры схемы замещения имеют поправочный коэффициент комплексное число, то схема называется точной, если действительное число, то схема называется уточненной.
Введены обозначения:
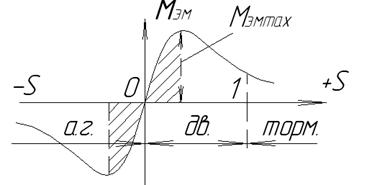
Режим асинхронного двигателя.
Образуется вращающееся поле, частота вращения изменяется от  до
до  .
.
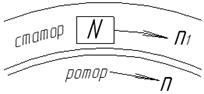
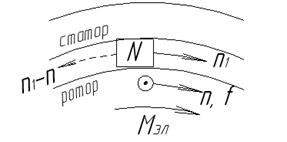 При вращении магнитного поля оно будет пересекать проводники ротора, в проводниках возникает ЭДС, под действием которой будет протекать ток, проводник с током взаимодействует с вращающимся магнитным полем и возникает электромагнитный момент.
При вращении магнитного поля оно будет пересекать проводники ротора, в проводниках возникает ЭДС, под действием которой будет протекать ток, проводник с током взаимодействует с вращающимся магнитным полем и возникает электромагнитный момент.
По правилу правой руки определяем направление тока в проводнике, далее используем правило левой руки, чтоб определить силу, действующую на проводник. Момент получили вращающийся- это доказывает, что мы имеем режим асинхронного двигателя.
 - режим асинхронного двигателя.
- режим асинхронного двигателя.
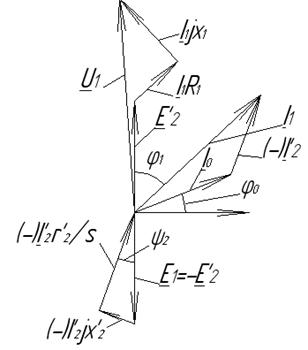
Уравнение равновесия:
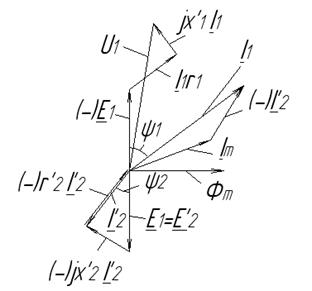 Учитывая, что асинхронные двигатели работают от сети с постоянным напряжением
Учитывая, что асинхронные двигатели работают от сети с постоянным напряжением  , увеличение тока нагрузки приводит к уменьшению ЭДС
, увеличение тока нагрузки приводит к уменьшению ЭДС  , а поскольку пропорциональна магнитному потоку, то увеличение тока
, а поскольку пропорциональна магнитному потоку, то увеличение тока  приводит к уменьшению магнитного потока.
приводит к уменьшению магнитного потока.
Поскольку падение напряжения при номинальной нагрузке составляет несколько % от , принято считать, что магнитный поток при изменении нагрузки остается постоянным.
Асинхронный двигатель из сети потребляет активную и реактивную мощность, активная идет на покрытие потерь и преобразовывается в механическую, реактивная мощность потребляется для создания магнитного потока.
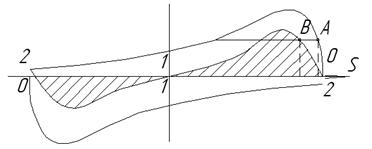
Режим асинхронного генератора.
Как видно из векторной диаграммы асинхронного двигателя – с уменьшением нагрузки двигателя будет происходить перемещение вектора в положение тока холостого хода.
В том случае, если довести с помощью вспомогательного элемента скорость ротора до синхронной мы получим идеальный холостой ход.
Когда машина из сети потребляет мощность, необходимую для покрытия потерь в стали и меди, а потери механические и добавочные будут покрываться за счет приводного двигателя.
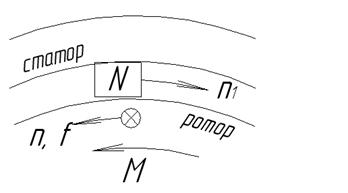
Если увеличить скорость в роторе выше синхронной (с помощью приводного двигателя), то получим новый режим.
 частота будет изменяться от
частота будет изменяться от 
Проводник перемещается по направлению часовой стрелки. Электромагнитный момент меняет свое направление и становится тормозным.
 Уравнение равновесия:
Уравнение равновесия:


Ток  разложим на две составляющие:
разложим на две составляющие:

Общее выражение для активной и реактивной составляющей тока:
При работе в режиме генератора скольжение меняет свой знак на отрицательный и, следовательно, как видно из полученных выражений активная составляющая тока так же меняет свой знак.
Проведенные исследования позволяют сделать заключение, что в генераторном режиме машина будет отдавать в сеть активную мощность, а потреблять реактивную. В связи с этим ограничено применение генератора. К генератору необходимо подключить блок конденсатора.
Кроме того у синхронных генераторов мощность, которая идет на возбуждение, составляет 1% от полной мощности, а у асинхронных 20-40%.
Режим электромагнитного тормоза.
Диапазон, в котором изменяется скорость: 
 Мощность подводится как со стороны сети, так и со стороны вала, режим характеризуется низким
Мощность подводится как со стороны сети, так и со стороны вала, режим характеризуется низким  и большими токами.
и большими токами.
Для улучшения и уменьшения токов, в ротор включаются активные дополнительные сопротивления.
Энергетическая диаграмма асинхронной машины:
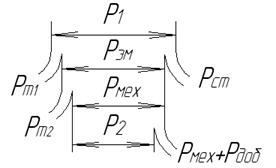
В этой диаграмме отсутствуют потери в стали ротора, это обусловлено тем, что работающей машины частота перемагничивания очень мала, потери на вихревые токи и гистерезис очень малы. Кроме основных потерь, указанных на диаграмме есть еще добавочные потери, которые делятся на добавочные потери холостого хода и добавочные потери при нагрузке.
При холостом ходе добавочные потери поверхностные (это потери в поверхностном слое зубцов статора и ротора, от пульсации индукции в воздушном зазоре) и пульсационные - в стали зубцов, от пульсации индукции в зубцах.
При нагрузке - потери, которые возникают под действием полей рассеяния, ступенчатости кривых распределения МДС обмоток статора и ротора, пульсации в воздушном зазоре, в короткозамкнутых роторах потери от токов между стержнями.
Если добавочные потери не рассчитываются, то они берутся как 0,5 от номинальной мощности двигателя.
КПД достигает максимального значения, когда переменные потери равны постоянным.
8 лекция.

Из Г- образной схемы замещения:

Максимальный электромагнитный момент:
Для того, чтобы найти  необходимо в формулу момента подставить скольжение. Скольжение, соответствующее максимальному электромагнитному моменту может быть найдено по условию:
необходимо в формулу момента подставить скольжение. Скольжение, соответствующее максимальному электромагнитному моменту может быть найдено по условию:

Из полученного выражения следует, что не зависит от  , отношение
, отношение  называется коэффициентом перегрузочной способности электрической машины. У больших асинхронных машин он больше 2.
называется коэффициентом перегрузочной способности электрической машины. У больших асинхронных машин он больше 2.
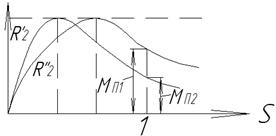
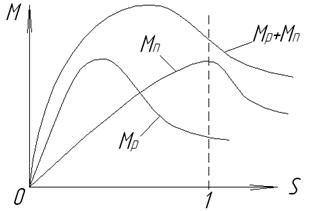
Пусковой момент асинхронного двигателя.
Пусковой момент – это магнитный момент при 
 зависит от активного сопротивления ротора.
зависит от активного сопротивления ротора.
 - кратность пускового момента, не меньше 0,7.
- кратность пускового момента, не меньше 0,7.

Как будет изменятся  при увеличении ?
при увеличении ?

Включение сопротивления в цепь ротора приводит к увеличению пускового момента.
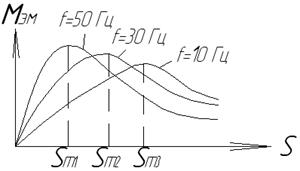
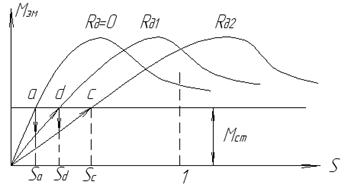
Рассмотрим, как влияет частота питающей сети на кривую момента:
Из анализа формулы  следует, что с уменьшением частоты питающей сети будет уменьшаться. В связи с этим произведенным анализом:
следует, что с уменьшением частоты питающей сети будет уменьшаться. В связи с этим произведенным анализом:
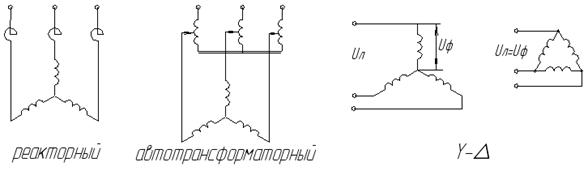
Методы пуска асинхронных машин.
1. Прямой пуск – когда двигатель непосредственно подключен к сети.
Достоинство – быстрый набор скорости, однако пусковые токи достигают 4 номинала, что может привести к недопустимому снижению напряжения.
2. При пониженном напряжении он распадается на три случая:
- реактивный пуск;
- автотрансформаторный пуск;
- переключение соединения обмоток  .
.
Как видно из формулы момента: и максимальный и пусковой момент зависят от квадрата тока.
9 лекция.

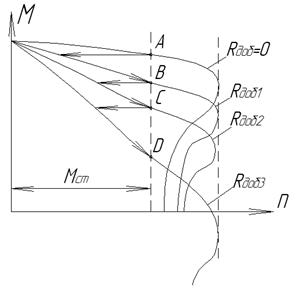
3.Пуск с помощью включения активного сопротивления в цепь ротора. Этот способ применяется для пуска асинхронных двигателей с фазным ротором.
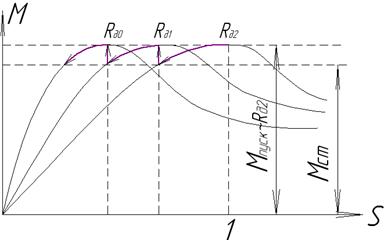
Переходим на сопротивление  :
:
т. в – новый режим.
Таким образом, ступенчатая кривая характеризует процесс пуска при выключении сопротивлений включенных в цепь.
Что будет с пусковым током?
 -это хорошо.
-это хорошо.
Ток в этом случае уменьшается.
 активная составляющая тока.
активная составляющая тока.
Из формулы тока видно, что включение добавочного сопротивления приводит к уменьшению общего тока  , но электромагнитный момент создается электромагнитной составляющей тока, который при повышении сопротивления ротора увеличивается.
, но электромагнитный момент создается электромагнитной составляющей тока, который при повышении сопротивления ротора увеличивается.

Короткозамкнутые двигатели с увеличенными характеристиками.
Двухклеточные двигатели – это двигатели, которые имеют две клетки с разным активным сопротивлением. Верхняя – пусковая, нижняя – рабочая.

При прохождении тока вокруг клеток, будут возникать поля рассеяния  . При одинаковых токах
. При одинаковых токах 
В начальный момент времени в связи с тем, что скольжение имеет наибольшее значение, ток будет протекать по верхней пусковой клетке и она будет обеспечивать электромагнитный момент.
По мере разгона двигателя, скольжение будет изменяться, что приведет к перераспределению тока (за счет изменения скольжения) и момент будет создаваться нижней рабочей клеткой.
Т.е запуск двигателя идет практически при постоянном максимальном моменте.
КПД у этих двигателей такое же, как у двигателей нормального исполнения, ниже, за счет повышенных полей рассеяния, плохое использование меди верхней обмотки.
Глубокопазный двигатель.
Глубокопазный двигатель – это двигатель, у которого 
Искусственно разделили проводники.
Поскольку по проводнику протекает переменный ток, в нем будет индуктироваться ЭДС рассеяния.

 потокосцепление проводника.
потокосцепление проводника.
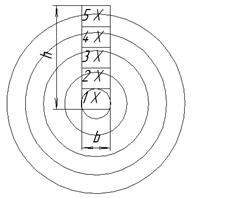 Из рисунка видно:
Из рисунка видно:
ЭДС рассеяния находится в противофазе с рабочей ЭДС .
 - плотность тока.
- плотность тока.

Под действием ЭДС рассеяния ток будет вытесняться в верхнюю часть проводника и в пределе можно считать, что ток будет проходить только по верхней части проводников, т.е сечение проводников уменьшается, это приводит к увеличению его активного сопротивления, а индуктивное сопротивление уменьшается.
По мере разгона машины эффект вытеснения значительно уменьшается и, следовательно, происходит уменьшение активного сопротивления (ЭДС рассеяния зависит от частоты, а частота зависит от скорости ротора – скорость увеличивается, частота уменьшается, ЭДС уменьшается). Поскольку у этих двигателей критическое скольжение по мере пуска максимального момента плавно перемещается в сторону малых скольжений и, следовательно, пуск проходит практически при максимальном пусковом моменте.
Регулирование частоты вращения асинхронных двигателей.

1. Скорость двигателя может регулироваться, путем изменения частоты питающей сети.
Для того, чтобы КПД, , перегрузочная способность до и после регулировки оставались постоянными, необходимо вместе с частотой регулировать напряжение и момент 

10 лекция.
2. За счет включения активного сопротивления в цепь якоря у двигателя с фазным ротором.
Недостаток: КПД понижается, диапазон регулирования зависит от тормозного момента (от нагрузки).
3. Изменение напряжения питающей сети.
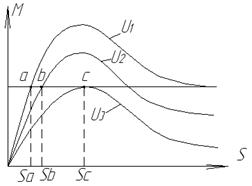

Недостаток: малый диапазон регулирования.
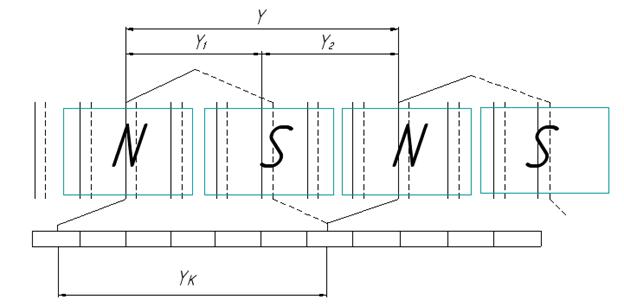
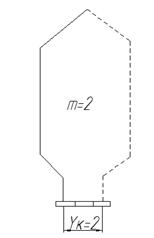
4. Изменение числа пар полюсов.

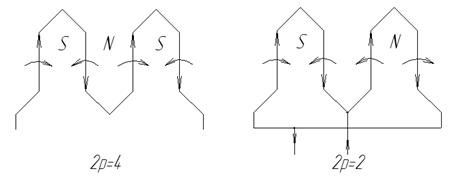
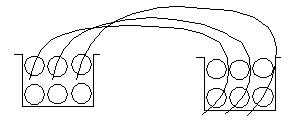
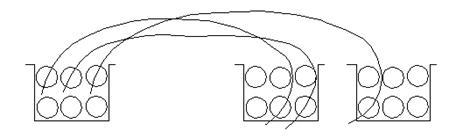
Для изменения числа пар полюсов, необходимо взять обмотку, у которой фаза состоит из двух частей, имея направление тока в одной из них, мы изменяем число пар полюсов.
Существуют двух, трех, четырех скоростные двигатели. У двух скоростных двигателей имеется обмотка с переключением пар полюсов. У трех и четырех скоростных двигателей имеются две обмотки, уложенные в те же самые пазы, у трехскоростном двигателе одна обмотка с регулировкой пор полюсов, другая без регулировки.
В случае четырехскоростного двигателя, регулирование идет в обеих обмотках.
Этот способ применяется только в двигателях с короткозамкнутым ротором, т.к пришлось бы менять число пар полюсов и у ротора.
5. Наиболее распространенная промышленная система – это переключение со звезды на двойную звезду.
6. Импульсное регулирование.
Напряжение на обмотки подается в виде импульсов, меняя соотношение длительности паузы и включенного состояния, достигается необходимая частота вращения.
7. Путем введения добавочной ЭДС в цепь ротора.
Работа асинхронного двигателя при неноминальных условиях.
Частота сети может отклонятся от номинального значения, напряжение так же может откланяться от номинального значения и, если момент со стороны механизмов остается номинальным, то эти отклонения в большую или меньшую сторону приводят к увеличению потребляемого тока. Работа при неноминальной мощности характеризуется уменьшением пульсности и КПД.
Не симметрия сопротивления в обмотке ротора.
Не симметрия сопротивления ротора возможна в случае обрыва стержней беличьей клетки, либо плохого контакта щетка- кольцо у асинхронных машин с фазным ротором, при этом в кривой момента появляется провал при скольжении равном 0,5. И машина при запуске может не развить номинальной частоты, а работать на промежуточной скорости потребляет большие токи.
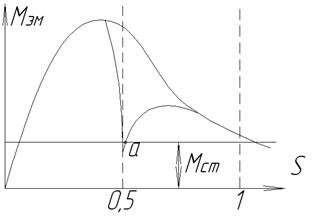
Двигатель будет устойчиво работать в точке а.
Не симметрия напряжений.
Не симметричную систему напряжений раскладывают на системы прямой, обратной и нулевой последовательности. Система нулевой последовательности не оказывает активного влияния на работу.
Система обратной последовательности создает обратно вращающиеся поля и соответственно тормозной момент, они снижают полезный момент на валу и создают добавочные потери в стали, все это требует снижения нагрузки двигателя.
Работа при не синусоидальном напряжении.
Раскладываем не синусоидальное напряжение на гармоники. Влияние высших гармоник эквивалентно увеличению индуктивных сопротивлений  , это приводит к уменьшению
, это приводит к уменьшению  , КПД, момента, даже при незначительном искажении кривой напряжения это слабо сказывается на работе двигателя.
, КПД, момента, даже при незначительном искажении кривой напряжения это слабо сказывается на работе двигателя.
Способы торможения электрических машин.
Существует три способа:
1)Режим противовключения.
2)Режим генераторного торможения.
3)Режим динамического торможения.
1-

Включение большого напряжения приводит к уменьшению тока и электромагнитного момента,  .
.
2 – Режим генераторного торможения характеризуется тем, что возможен только у двигателя с переключением пар полюсов, т.е двигатель работает в определенном режиме. Произведем переключение числа пар полюсов на большее значение, это приведет к снижению синхронной скорости, и ротор относительно новой синхронной скорости, будет иметь большую частоту вращения. Асинхронный двигатель переходит в режим асинхронного генератора, тогда электромагнитный момент будет тормозным.
3 – Режим динамического торможения. В этом случае обмотка статора отключается от сети. В одну или обе обмотки подается постоянный ток и двигатель работает в режиме генератора постоянного тока. При этом вся вырабатываемая мощность гасится в обмотке ротора – режим теплонапряженный, в этом случае зависимость выглядит таким образом:
Работа асинхронного двигателя при обрыве однойфазы.
При обрыве одной фазы вращающееся поле асинхронной машины превращается в пульсирующее, которое может быть разложено на два вращающихся в противоположные стороны поля с половинной амплитудой.
При обрыве одной фазы, двигатель продолжит вращаться в том же направлении, но ток увеличивается, а 
11 лекция.
Влияние высших гармоник на работу асинхронного двигателя.
Высшие гармоники магнитного поля, имеющие простейший период меньше  , могут возникать в асинхронной машине вследствие не синусоидальной кривой МДС и вследствие зубчатости.
, могут возникать в асинхронной машине вследствие не синусоидальной кривой МДС и вследствие зубчатости.
Рассмотрим высшую гармонику, передвигающуюся в направлении вращения ротора и созданную током статора, это поле наводит в замкнутой обмотке ротора ток соответствующей частоты, который в свою очередь создает магнитное поле, передвигающееся по поверхности ротора и вращающееся в воздушном зазоре синхронно с рассматриваемым полем статора.
Магнитные поля статора и ротора будут иметь одинаковый пространственный период и суммируясь создают вращающееся поле. Это поле, взаимодействуя с током ротора, создает вращающийся момент, который имеет природу асинхронного. Если ротор вращается медленнее соответствующей гармоники, то будет иметь место двигательный режим, и вращающийся момент будет направлен в сторону вращения ротора. Если ротор вращается быстрее поля, то возникает генераторный режим и момент будет тормозным, т.о каждая высшая гармоника будет создавать соответствующий асинхронный момент, который будет складываться с моментом первой гармоники.
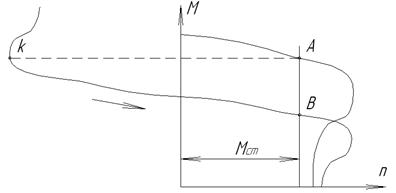
При скольжении 0,856 скорость ротора и поле седьмой гармоники двигаются с одинаковой скоростью, следовательно, момент электромагнитный будет равен 0.
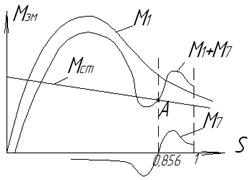
Если скорость ротора будет меньше, чем  , то момент будет двигательный, а если больше, то генераторный.
, то момент будет двигательный, а если больше, то генераторный.
 кривая момента от седьмой гармоники.
кривая момента от седьмой гармоники.
В точке а машина может застрять и устойчиво работать со скольжением  , т.е машина не достигнет номинальных значений и будет работать с малой частотой и при больших токах.
, т.е машина не достигнет номинальных значений и будет работать с малой частотой и при больших токах.
И чтоб избавиться от этих гармоник, применяется укорочение шага обмотки.
Синхронные вращающиеся моменты.
Не все высшие гармоники магнитного поля, созданные статором и ротором, сцепляются с обеими обмотками. Это особенно характерно для зубцовых гармоник. При определенных частотах вращения ротора отдельные гармоники поля статора могут двигаться синхронно с соответствующими гармониками поля ротора. Под действием магнитных сил в этом случае возникает механическое взаимодействие между статором и ротором, и образуется вращающийся момент, который может быть назван синхронным.
При опережении зубцовым полем статора поле ротора, возникает двигательный момент, при отставании и той же скорости вращения возникает тормозной момент.
Если синхронный момент при пуске достаточно велик, то машина может не достичь номинальной частоты вращения.
Синхронные моменты наиболее сильно проявляются при  . Эти моменты могут быть полностью устранены путем скоса пазов и правильного соотношения
. Эти моменты могут быть полностью устранены путем скоса пазов и правильного соотношения  .
.
Вибрационные силы, действующие на асинхронную машину.
Зубцовые и другие магнитные поля статора и ротора, образующие синхронный вращающийся момент проявляются не только при взаимно синхронном вращении, но и при любых других скоростях, в этом случае они образуют периодически вращающееся моменты, которые в течение одного полупериода направлены в обратном направлении. Такие периодически меняющиеся моменты создают вибрации ротора и отдельных частей машины, эти явления становятся особенно заметными при наличии резонансных явлений. При неблагоприятных соотношениях зубцов статора и ротора могут возникать не только тангенциальные составляющие, но и радиальные магнитные силы, действующие на статор и ротор и перемещающиеся вдоль окружности воздушного зазора, при вращении ротора эти силы вызывают вибрацию машины. Шумы при работе асинхронных машин могут возникать вследствие механических и магнитных колебаний. Механические причины шума зависят от балансировки ротора, состояния подшипников и колебания вентилирующего воздуха в каналах охлаждения. Более неприятный шум, вызванный магнитными явлениями, связанными с наличием высших гармоник магнитного поля.
Стальные листы и отдельные ферромагнитные части машины, попадая в переменное магнитное поле Зубковой частоты, начинают колебаться.
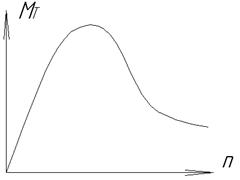
Рабочие характеристики асинхронных машин.
Рабочие характеристики – это зависимости  от
от  .
.

1) 

По мере возрастания нагрузки нелинейность увеличивается.
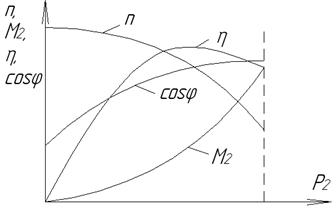
2) 
3) Характер КПД обусловлен присутствием потерь в меди, которые пропорциональны квадрату тока и заставляют уменьшаться КПД.
4) Векторная диаграмма асинхронного двигателя объясняет характеристику 
Как видно из векторной диаграммы – по мере увеличения нагрузки угол  будет уменьшаться, и следовательно будет увеличиваться
будет уменьшаться, и следовательно будет увеличиваться
 увеличивается
увеличивается  , в когда
, в когда  .
.
Однако по мере увеличения нагрузки тоже уменьшается  .
.
Серии асинхронных машин.
1973г. – серия 4А.
1980г. – серия АИ и ее модификации.
1990г. – 5А, РА.
Настоящее время – 6А, 7А.
Специальные асинхронные машины.
1) Асинхронная машина с массивным ротором – ротор делается из цельной паковки. Это позволяет получить скорости от 10 до 10000 оборотов в минуту.
Имеют низкий КПД и низкий .
2) Линейный двигатель.
3) Скользящие электромагнитные муфты.
4) Магнитогидродинамические машины переменного тока (МГД). Пример такой машины – индукционный насос для перекачки металла.
5) Поворотный трансформатор.
6) Преобразователь частоты.
Принцип действия машины постоянного тока.
Машина постоянного тока – это традиционная машина.
Направление ЭДС и тока в рамке определяют по правилу
левой руки.
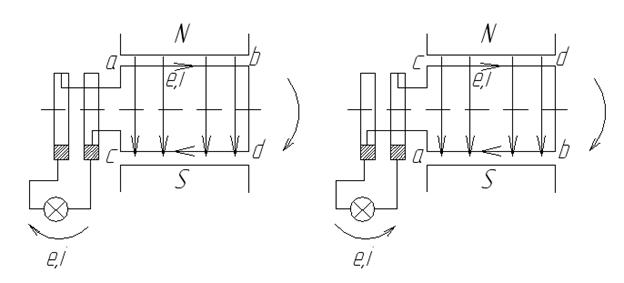
При повороте рамки на  ток меняет свое направление, следовательно, перед нами модель генератора переменного тока.
ток меняет свое направление, следовательно, перед нами модель генератора переменного тока.
Для того, чтобы преобразовать генератор переменного тока в генератор постоянного тока кольца заменяют механическим преобразователем – коллектором, который меняет ЭДС и ток в рамке на постоянный на щетках.
Модель генератора постоянного тока (при повороте на ток не меняет своего направления.)

Как у генератора переменного тока, так и у генератора постоянного тока ток и ЭДС в рамке протекает переменный. Рамка в машинах называется секцией.
Самые первые машины постоянного тока были с кольцевыми якорями и представляли собой следующую конструкцию:
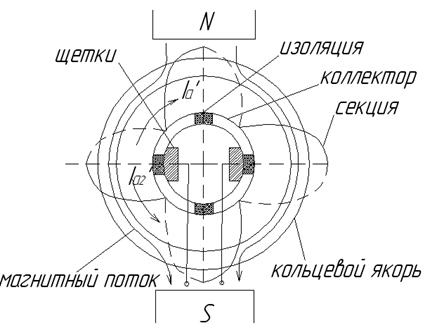
Четырем секциям соответствуют 4 коллекторные пластинки.

а=1- число пар параллельных ветвей.
Для лучшего использования меди обмотки кольцевого якоря заменили на барабанные. Такой якорь представляет собой барабан, обмотка укладывается в пазы.
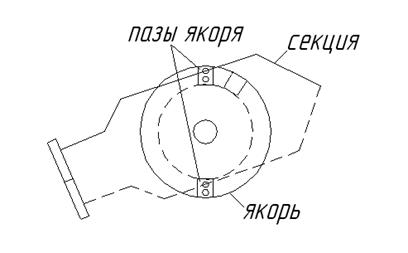
Паз бывает элементарным – когда в пазу уложены две стороны секции.
И паз бывает реальный, если в пазу уложено 4-6 сторон секции.

Геометрическая нейтраль.
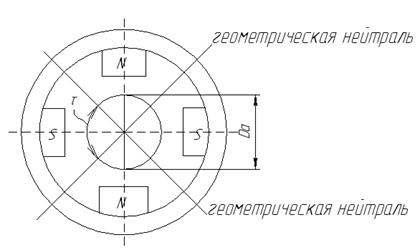

 - полюсное деление.
- полюсное деление.
 -диаметр якоря.
-диаметр якоря.
Обмотки машин постоянного тока:
- простая петлевая обмотка.
- простая волновая обмотка.
- сложная петлевая обмотка.
- сложная волновая обмотка.
- комбинированная обмотка (лягушачья).
Простая петлевая обмотка.

 шаг по коллектору.
шаг по коллектору.
 коллекторное деление.
коллекторное деление.
Если  , то мы имеем правоходовую неперекрещивающуюся обмотку.
, то мы имеем правоходовую неперекрещивающуюся обмотку.
Если  , то мы имеем левоходовую перекрещивающуюся обмотку.
, то мы имеем левоходовую перекрещивающуюся обмотку.
Наиболее часто применяется первый тип, когда .
 = целому числу.
= целому числу.
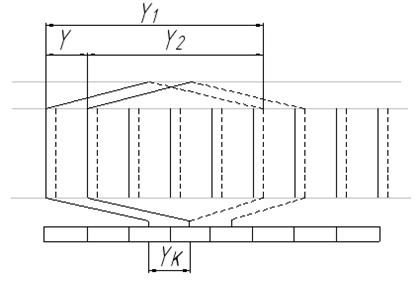
 - первый частичный шаг обмотки.
- первый частичный шаг обмотки.
 - второй частичный шаг обмотки.
- второй частичный шаг обмотки.
 - результирующий шаг обмотки.
- результирующий шаг обмотки.


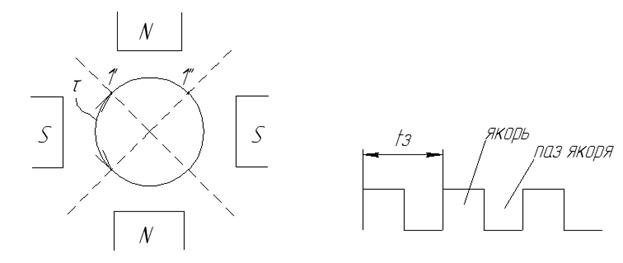
 - полюсное деление, выраженное в зубчатых делениях.
- полюсное деление, выраженное в зубчатых делениях.
 - зубчатое деление.
- зубчатое деление.
 - число пазов.
- число пазов.
 -число пар полюсов.
-число пар полюсов.
- если  = целому числу (
= целому числу ( ) – диаметральная обмотка.
) – диаметральная обмотка.
- если  - обмотка с удлиненным шагом (
- обмотка с удлиненным шагом ( ).
).
- если  - обмотка с укороченным шагом (
- обмотка с укороченным шагом ( ).
).
Чаще всего применяются обмотки с укороченным шагом. Такие обмотки помогают уменьшить потребление меди, за счет уменьшения лобовых частей обмотки и обеспечивают лучшую коммутацию.
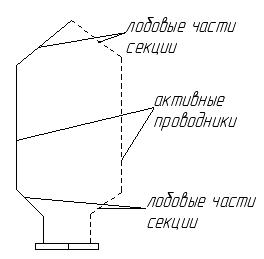
1.лобовые части секции-это конструктивный элемент, участвующий в формировании секции.
2.активные проводники – участвуют в формировании ЭДС.
Характерные особенности петлевых обмоток:
- число пар параллельных ветвей равно числу пар полюсов (а=р).
-число щеточных пальцев равно числу пар полюсов( ).
).
Простая волновая обмотка.
= целому числу.
 = целому числу. к - число коллекторных пластин.
= целому числу. к - число коллекторных пластин.
Ели в числителе +1, то обмотка правоходовая – после обхода волны мы приходим ко второму коллекторному делению.
Ели в числителе -1, левоходовая неперекрещивающаяся обмотка– после обхода волны приходим к n- ому коллекторному делению.

Характерные особенности простой волновой обмотки:
- а=1.
-минимальное число щеточных пальцев может быть равно 2 ( ), однако, как правило, число щеточных пальцев берется равным числу полюсов (), поскольку в первом случае значительно возрастает длина коллектора.
), однако, как правило, число щеточных пальцев берется равным числу полюсов (), поскольку в первом случае значительно возрастает длина коллектора.
Сложная волновая обмотка.
 m -число заходов в обмотке (2, 3….).
m -число заходов в обмотке (2, 3….).
к - число коллекторных пластин.
Эта обмотка после обхода волны не доходит до исходной, либо переходит исходную коллекторную пластину на m делений а=m.
Если шаг по коллектору( ) и число заходов(m) имеют общий делитель(t), то такая обмотка распадается на t-простых электрически независимых обмоток,
) и число заходов(m) имеют общий делитель(t), то такая обмотка распадается на t-простых электрически независимых обмоток,
электрическая связь которых осуществляется с помощью щеток.
Сложная петлевая обмотка.
 2, 3,..m
2, 3,..m
а = рm
если число коллекторных пластин (к) четное и число заходов(m) равно 2,
обмотка распадается на две простые электрически несвязные обмотки и называется двукратно замкнутой.
Ступенчатые обмотки. Они имеют большое распространение.
Равносекционные обмотки:
Для улучшения коммутации (снижения искрений) применяются ступенчатые обмотки такого вида:
Комбинированная обмотка (лягушачья).
Комбинированная обмотка состоит из сложной волновой и простой петлевой обмоток, которые укладываются в те же пазы и подсоединяются к тем же коллекторным пластинам. Их особенность в том, что они не требуют уравнительных соединений. Простая петлевая обмотка выступает уравнителем второго рода для сложной волновой обмотки, а сложная волновая обмотка выступает уравнителем первого рода для простой петлевой обмотки.
Date: 2015-07-22; view: 736; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |