Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Обоснование эффективного способа движения МТАи определение основных показателей холостого хода
1.Выписать из табл. 5.1 исходные данные по соответствующему варианту задания.
2.Выбрать для заданной операции эффективный способ движения и вид поворота, обеспечивающие высокое качество и безопасность работы при наименьших потерях времени смены на подготовку поля, включая разбивку поля на загоны, отбивку поворотных полос, заравнивание свальных гребней и развальных борозд, обработку стыков и др. Изобразить сему движения агрегата в соответствии с рис. 5.1 с учетом выбранного да поворота.
3.Определить средний радиус поворота R и длину выезда l агрегата, также рациональную ширину поворотной полосы Е.
4.Определить оптимальную ширину загона, обеспечивающую минимум длины холостого хода пути СSO и соответствующих потерь смены CTO.
5.Определить длину холостого пути агрегата SXO, коэффициент рабочих ходов j РО и общие потери времени смены ТХO при оптимальной ширине загона.
6.Представить итоговые результаты расчетов по каждому пункту задания, включая исходные данные, в форме таблицы, приведенной в конце задания.
Таблица 5.1
Варианты заданий
| № | Вид операции | L, м | Состав агрегата | В, м | VX, км/ч | Z |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | Вспашка легких почв | 400 | МТЗ-80 + ПЛН-3-35 | 1,05 | 8 | 2 |
| 2 | Вспашка сред- них почв | 600 | ДТ-75М+ПЛН-4-35 | 1,40 | 7 | 3 |
| 3 | Вспашка тяжелых почв | 1000 | Т-150 + ПЛН-5-35 | 1,75 | 7 | 3(П) |
| 4 | Боронование зубовыми боронами | 1000 | Дт-75М + СГ-21-20БЗСС-1 | 20 | 8 | 1 |
| 5 | Лущение стерни | 400 | МТЗ-82+ЛДГ-5 | 5 | 8 | 1 |
| 6 | Дискование | 600 | ДТ-75М + ЛДГ-10 | 10 | 9 | 1 |
| 7 | Сплошная культивация | 600 | Т-150К+ СП-11 + 2КПС-4 | 8 | 9 | 1 |
| 8 | Прикатывание | 400 | ЮМЗ-6М+СП-11- +2ХЗККШ-6 | 12,2 | 8 | 1 |
| 9 | Посев, зерновых (узкорядный) | 600 | МТЗ-80 - СЗ-3,6 | 3,6 | 8 | 1 |
| 10 | Посадка картофеля | 400 | МТЗ-82 + СН-4Б | 2,8 | 7 | 1 |
| 11 | Междурядная культивация | 400 | МТЗ-80 + КРН-4.2 | 4,2 | 8 | 1 |
| 12 | Уборка картофеля (комбайновая) | 600 | ДТ-75М + ККУ-2А | 1,4 | 4 | 1 |
| 13 | Уборка силосных культур | 600 | МТЗ-82+ КС-1,8 | 1,8 | 7 | 1 |
| 14 | Кошение трав | 600 | ЮМЗ-6М+КС-2.1 | 2,1 | 8 | 1 |
| 15 | Вспашка легких почв | 800 | Т-150+ПЛП-6-35 | 2,1 | 1 | |
| 16 | Вспашка сред- них почв | 1000 | К-701 +ПТК-9-35 | 3,15 | 9 | 3(П) |
| 17 | Вспашка тяжелых почв | 600 | Т-150 + ПЛН-5-35 | 1,75, | 7 | 2(П) |
| 18 | Боронование зубовыми боронами | 600 | МТЗ-80 + СП-11 + + 12БЗСС-1 | 12 | 7 | 1 |
| 19 | Лущение стерни | 1000 | Т-150К + ЛДГ-15 | 15 | 9 | 1 |
| 20 | Дискование | 800 | К-700А + ЛДГ-20 | 20 | 8 | 1 |
| 21 | Сплошная культивация | 900 | К701+СП-16+4КПС-4 | 16 | 9 | 1 |
| 22 | Прикатывание | 800 | MT3-80+СП-11 +2х3ККШ-6 | 12,2 | 9 | 1 |
| 23 | Посев зерновых (узкорядный) | 400 | МТЗ-80 + СЗУ-3,6 | 3,6 | 8 | 1 |
| 24 | Посадка картофеля | 600 | ДТ-75М + СКМ-6 | 4,2 | 6 | 1 |
| 25 | Междурядная культивация | 600 | МТЗ-80 + КРН-5,6 | 5,6 | 8 | 1 |
| 26 | Уборка картофеля (комбайновая). | 600 | МТЗ-82 + ККУ-2А | 1,4 | 5 | 1 |
| 27 | Уборка силосных культур | 600 | ДТ-75М + КСС-2,6 | 2,6 | 8 | 1 |
| 28 | Кошение трав | 600 | ЮМЗ-6М + КЛД-4Л | 4 | 7 | 1 |
| 29 | Вспашка сред- них почв | 800 | К701 + ПТК-9-35 | 3,15 | 8 | 2(П) |
| 30 | Посев зерновых (узкорядный) | 800 | ДТ-75М+СП-11- + 3С3У-3.6 | 10,8 | 9 | 1 |
Примечание:
(П) - поле подготовлено и обработка поворотных колёс не требуется.
Основные положения
Основной целью данного задания является получение студентами навыков самостоятельного выбора эффективных способов движения агрегатов, обеспечивающих в заданных условиях высокое качество работы МТА, безопасность и наименьшие потери времени смены на холостые повороты. Соответственно обеспечивается также минимальный непроизводительный расход топлива.
Таким образом, в соответствии с системным подходом показатели ресурсосбережения, полученные в предыдущих заданиях, дополняются экономией расхода топлива и времени смены.
Методические указания по выполнению задания 5
1. Исходные данные выбираются из табл. 5.1 по соответствующему варианту задания.
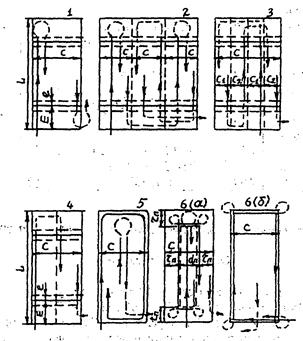
Рис. 5.1. Схемы основных способов движения МТА (по направлению рабочих ходов): 1 - челночный; 2 - чередование всвал, вразвал; 3 - беспетлевой комбинированный; 4- перекрытием; 5 -круговой; б (а, б) -круговой «конверт»
2. При выборе способа движения по рис. 5.1 и вида поворота, по рис. 5.2 следует учесть следующие основные требования; высокое качество технологического процесса; безопасность поворота; удобство, выполнения и др. Студент должен указать также и другие возможные для данной операции способы движения, обосновать выбор наиболее приемлемого из них и изобразить схему выбранного способа движения в тетради.
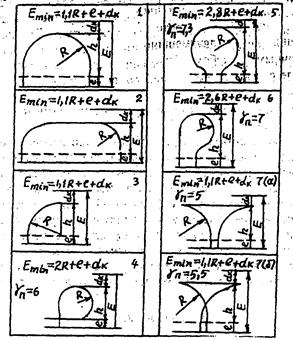
Рис. 5.2. Основные виды поворотов МТА: 1 - беспетлевой на 180°; 2 - беспетлевой с прямолинейным участком; 3 - беспетлевой на 90°; 4 - петлевой грушевидный; 6 - петлевой односторонний; 7(а, б) - петлевые грибовидные
Например, для вспашки обычными, плугами применимы способы движения всвал и вразвал (как раздельно, так и с чередованием), беспетлевой комбинированный, а также круговой «конверт» (6а).
При беспетлевом комбинированном способе движения сложнее разбивка поля на загоны, но меньше ширина поворотной полосы. Круговой способ, движения «конверт» (6а) обеспечивает меньший холостой путь агрегата, однако при этом больше потери времени смены на разбивку поля на загоны, а также сложнее практическое осуществление.
Лущение, дискование, боронование (зубовыми боронами) возможны способами: челночным, круговым, вразвал, перекрытием. Круговой способ эффективен при небольшой ширине захвата и малых размерах полей со сложной конфигурацией. Способы движения вразвал и, перекрытием для этих операций, рекомендуются при большей ширине захвата MTA, когда выполнение петлевых поворотов затруднительно. Посевные и посадочные операции одно- и двухмашинными агрегатами выполняются челночным способом. Узкорядный посев зерновых при трех и большем числе сеялок в агрегате предпочтительнее выполнять перекрытием или вразвал.
Для сплошной и междурядной культивации возможны челночный способ и перекрытием.
При уборке картофеля целесообразно применение беспетлевого комбинированного способа движения на четырех попарно равных частях загона с условием, чтобы, убранное поле находилось Справа (со стороны выгрузки клубней). При кошении трав и уборке силосных культур возможно применение кругового способа и способа движения вразвал.
Аналогичные соображения учитываются и при других операциях.
3. Средний радиус поворота агрегата R, длина выезда е и ширина поворотной полосы Е определяются на основании следующих положений.
Радиус поворота R зависит от конструктивных особенностей агрегата, ширины захвата В и средней скорости движения VХ и определяется из равенства
 (5.1)
(5.1)
где аRO – коэффициент пропорциональности при VX =5 м/ч; aRV – поправочный коэффициент при VX > 5 км/ч.
Примерные значения аRO и aRV для основных типов агрегатов приведены В табл.5.2
Длина выезда агрегата е определяется обычно в долях кинематической длины lК в виде
 (5.2)
(5.2)
Как правило, чем больше ширина захвата МТА, тем больше и е, поэтому приближенно можно принять
 (5.3)
(5.3)
Таблица 5.2
Значения аRO и аRV по усредненным справочным данным
(Н- навесные машины, П — прицепные машины)
| Агрегаты | аRO | аRV | ||||||
| VX = 5км/ч | VX = 7км/ч | VX = 9км/ч | VX = 12км/ч | |||||
| Н | П | Н | П | Н | П | Н | П | |
| Пахотные | 3 | 4,50 | 1,05, | 1,15 | 1,20 | 1,42 | 1,35 | 1,65 |
| Для предпосевной обработки почвы | 0,90 | 1,40 | 1,06 | 1.25 | 1,32 | 1,55 | 1,46 | 1,75 |
| Посевные и посадочные (одно и двухмашинные) | 1,10 | 1,60 | 1,08 | 1,32 | 1.41 | 1,57 | 1,58 | 1,80 |
| Посевные (от трех до пяти сеялок) | 0,90 | 1.20 | 1,08 | 1,32 | 1.41 | 1,57 | 1.58 | 1,80 |
| Для междурядной культивации | 0,80 | 1,10 | 1,06 | 1.35 | 1,34 | 1.68 | 1,48 | 1.85 |
| Косилочные | 0,90 | 1,20 | 1,09 | 1,30 | 1,46 | 1,62 | 1.52 | 1.82 |
| Жатвенные | 0,90 | 1,60 | 1.09 | 1.90 | 1.46 | 1,62 | 1,52 | 1,82 |
Примерные значения аеК для некоторых типов агрегатов приведены в табл. 5.3. Из (5.2), (5.3) следует, что длину выезда е можно определять из упрощенной зависимости
 (5.4)
(5.4)
При практических расчетах рекомендуется применять:
аео = 0,6... 0,7 – для прицепных агрегатов;
аео = 0,1... 0,2 – для навесных агрегатов.
Значение ае в (5.4) определяется в результате умножения аеК из табл. 5.3 на приведенное выше значение аео для соответствующего типа агрегата. Для агрегатов, не вошедших в табл. 5.3, значение аеК определяется приближенно на основании равенства
 (5.5)
(5.5)
где lТ – кинематическая длина трактора, м; lC – кинематическая длина сцепки, м; lM – кинематическая длина рабочей машины, м.
Таблица 5.3
Значения аеK для основных типов агрегатов
| Агрегаты | аеK |
| Пахотные | 3,00 |
| Для лущения и дискования | 0,97 |
| Для сплошной и междурядной культивации | 1.54 |
| Для боронования | 0.69 |
| Для прикатывания | 0.57 |
| Для посева и зерновых | 1,33 |
| Для посева и посадки пропашных культур | 0.65 |
Значения lТ и lC для основных марок тракторов и сцепок приведены в табл. 5.4.
Таблица 5.4
Значения lM и lC (по справочным данном)
| Марка трактора или сцепки | lM, м | lС , м |
| T-I6M, Т-25А | 1.0 | – |
| Т-40М | 1,32 | – |
| МТЗ–80/82 | 1,2/1,3 | – |
| ДТ-75М | 2,35/1,55 | – |
| Т-150 | 2,12/2,55 | – |
| Т-150К | 2,9/2,4 | – |
| Т-4А | 2,45/1,65 | – |
| К-701 | 3,35/2,9 | – |
| СП-11 | – | 6,7 |
| СП-16 | – | 9,8 |
| СГ-21 | – | 8,0 (с боронами) |
В числителе - навесной, в знаменатели - прицепной варианты.
При определении аеК для типов машин, не вошедших в табл. 5.3, 5.4, можно воспользоваться следующими приближенными значениями: lM = 3 м - силосоуборочные комбайны КСС-2,6, КС-1,8; lM = 4м- картофелеуборочный комбайн ККУ-2А; lM = 1,0 м - косилки КС-2,12 и КПД-4,0.
Фактическая ширина поворотной полосы E должна быть не менее допустимого минимального значения Emin.
Кроме того, Е должна быть кратной одной или удвоенной ширине захвата с учетом направления выезда агрегата и уменьшения холостого, пути: Минимальная ширина поворотной полосы определяется в соответствии с рис. 5.2 в виде суммы:
 (5.5)
(5.5)
где dK - расстояние от продольной оси, проходящей через кинематический центр агрегата, до наиболее удаленной точки (влево dКЛ или вправо dКП в зависимости от направления поворота).
Расстояние h = l E × R пропорционально радиусу, а dK – ширине захвата dK = vE × B. Соответственно равенство (5.5),примет вид:
 (5.6)
(5.6)
Значения аR и ае получены ранее, а значения l E равны коэффициентам при R на рис. 5.2. Для симметричных, агрегатов с учетом выступающих частейсцепки и машины можно принять vЕ = 0,6. Асимметричные агрегаты могут совершать повороты как по направлению вращения часовой стрелки, так и против.. Поэтому для dK следует брать наибольшее значение от продольной оси в направлении расположения рабочих органов.
Ориентировочно для этого случая, можно принять dK = 1,2 B и соответственно vE для асимметричных агрегатов будут иметь значение vE = l,2. Если поворотную полосу намечается обработать за нечетное количество проходов nH, то расчетное значение nHP определяется из равенства
 (5.7)
(5.7)
Этот результат округляется в большую сторону до нечетного значения (целого) по условию nH ³ nHP. Умножив фактическое число проходов пH на ширину захвата В, получим значение рациональной ширины поворотной полосы, кратной ширине захвата агрегата:
 (5.8)
(5.8)
При четном количестве проходов пH результат равенства (5.7) следует округлить до ближайшего большего четного значения. Четность или нечетность числа проходов на поворотной полосе зависит от особенностей выполняемой операции и расположения соседнего загона, на который должен переехать aгpeгaт.
4. Оптимальная ширина загона и другие показатели холостого хода МТА с позиций ресурсосбережение должны обеспечивать минимальной холостой путь агрегата на каждом гектаре обработанной площади
SХ ® min (5.9)
а также минимальные потери времени смены, связанные с холостым ходом,
ТХ ® min (5.10)
Длина холостого пути МТА SХ в расчете на 1 га для всех основных способов движения, изображенных на рис. 5.1, определяется из обобщенного равенства:
 (5.11)
(5.11)
где SХ – длина холостого пути в расчете на 1 га, м; lС =С / В – отношение ширины загона к ширине захвата; L – длина гона, м; В – ширина захвата агрегата, м.
Величины ЕX, АX, ДX характеризуют особенности каждого способа движения и организационные формы его реализации. Значений E и формулы для расчета АX и ДX приведены ниже для всех основных способов движения.
Более полным показателем эффективности выбранного способа движения агрегата является минимум общих потерь времени смены, связанных с холостым ходом, в расчете на 1 га:
 (5.12)
(5.12)
где ТХ – потери времени смены, связаннее с холостым ходом, с; VХ – скорость холостого, поворота, км/ч; Z – число агрегатов, работающих в одном загоне; TBС – вспомогательное время, связанное с холостым ходом МТА в пределах одного загона, с.
Если каждый агрегат работает на отдельном загоне, то в (5.10), (5.11) следует принять Z = 1. Такой вариант групповой работы агрегатов является наиболее эффективным.
Вспомогательное время TBС для каждого агрегата в пределах одного загона включает: вpeмя на разметку загона, настройка агрегата для первого прохода и последующей перестройки на основной режим работы; время подготовки агрегата к переезду на соседний загон и последующей перенастройки на основной режим работы и т.д.
Расчетная оптимальная ширина загона СТОР по общему критерию (5.12) определяется исходя из условия dTX / dC =0:
 (5.13)
(5.13)
Расчетная оптимальная ширина загона CSOP по минимуму длины холостого пути (5.9) определяется из (5.12) в виде частного решения при TBС = 0:
 (5.14)
(5.14)
Сравнение (5.13), (5.14) показывает, что критерию ТХ = min соответствует большее значение ширины загона.
Критерий (5.12) более полно отражает производственную ситуацию, поэтому практические расчеты целесообразно проводить по этой формуле.
Потери времени ТBC при этом могут быть определены на основании хронометражных наблюдений.
Для учебных целей можно воспользоваться следующими значениями ТBC: пахотные агрегаты – 180 с; агрегаты для боронования, дискования, сплошной и междурядной культивации и прикатывания – 120 с; посевные и посадочные агрегаты – 140 с; уборочные агрегаты, включая косилочные – 120 с.
Оптимальная ширина загона должна быть кратной удвоенной ширине захвата агрегата, поэтому на основании (5.12) и (5.13) предварительно следует определить соответствующее количество двойных проходов агрегата:
 ,
,  (5.15)
(5.15)
Округлив расчетные значения п2TP и n2SP в большую сторону до целых чисел п2T ³ п2TP и п2S ³ п2SP, определим соответствующие фактические значения оптимальной ширины загони по обоим критериям:
 ,
,  (5.16)
(5.16)
5. Длину холостого пути агрегата SХО в расчете на 1 га при оптимальной ширине загона CSO получим на основании (5.11) при l C = l CSO = CSO / B в виде.
 (5.17)
(5.17)
Соответствующий коэффициент рабочих ходов определяется из равенства
 (5.18)
(5.18)
где SP = 104 / B – длина рабочего пути агрегата в расчете на 1 га, м.
Общие потери времени смены, связанные с холостым ходом ТXO, в расчете на 1 га получим из (5.12) при l C = l CTO = СTO / В в виде:
 (5.19)
(5.19)
Значения ЕХ, АХ, ДХ для основных способов движения определяются по приведенным ниже зависимостям.
Все варианты способов движения всвал и вразвал,
включая чередование загонов
ЕХ = 0,5;
 (5.20)
(5.20)
 (5.21)
(5.21)
где Z – число агрегатов, работающих на одном загоне; b Р – количество борозд и гребней на одном загоне (при чередовании следует принять b Р = 1, а без чередования b Р = 2); g П – коэффициент, характеризующий зависимость длины петлевого поворота l от радиуса (lП = g П × R + 2l), значения g П приведены на рис. 5.2 для соответствующих видов поворотов; тД – число дополнительных заездов на заравнивание одной развальной борозды, свального гребня, стыка между проходами и т.д. (для пахотных агрегатов тД = 2, а для непахотных агрегатов следует принять тД = 1); m П = 1 / пЗП – величина, обратная количеству загонов пЗП, поворотные полосы которых обрабатываются совместно (чаще пЗП = 1 и соответственно m П = 1); b З – коэффициент, характеризующий, на какую часть ширины загона в среднем перемещается агрегат при переездах с одного загона на другой (в среднем с учетом многообразия вариантов можно принять b З = 1,75); пПК – число петлевых поворотов, сделанных на загоне при предварительной подготовке поля другим агрегатом (если поле предварительно не подготовлено, то следует принять пПК = 0, а если подготовлено, то пПК = 1).
При рациональном чередовании загонов, когда нечетные загоны обрабатываются в направлении слева направо всвал. а четные – справа налево вразвал, длина холостого пути агрегата при прочих равных условиях уменьшается.
Основные частные случаи определения АХ и ДХ:
Z = 1 – работа каждого агрегата на отдельном загоне;
тД = 0 – работа без дополнительных заездов на заравнивание борозд, гребней, стыков и т.д. при предварительной подготовке поля другим вспомогательным агрегатом;
m П = 0 – работа без обработки поворотных полос при наличии свободных мест на краях загона или предварительной подготовке полей;
пПК = 1 – работа при предварительной прокладке борозд и прокосов.
При тД = 0 и m П = 0 длина холостого пути агрегата, существенно уменьшается и оптимальная ширина загона СО не зависит от длины гона. В связи с этим, в состав звена мощных агрегатов следует включать агрегаты (вспомогательные) меньшей мощности для обработки стыков и поворотных полос, так называемый способ движения уборочных агрегатов с расширением прокосов является частным случаем чередования всвал и вразвал на трех загонах с предварительной обработкой поворотных полос и стыков, когда тД = m П = 0.
Все варианты движения беспетлевым комбинированным способом
Различия между вариантами в данном случае состоят в основном в ширине С 1, С 2 попарно равных частей загона, очередности попарной обработки указанных частей и в направлении движения агрегата при этом (по или против направления хода часовой стрелки). Для рациональной очередности обработки загонов в соответствий с рис. 5.1 получены следующие выражения для ЕХ, АХ, ДХ:
ЕХ = 0,5;
 (5.22)
(5.22)
 (5.23)
(5.23)
При необходимости дополнительных заездов для обработки борозд, гребней или стыков следует принимать b Р = 2. Случаи тД = 0 и m П = 0 аналогичны рассмотренным выше. При тД = m П = 0 имеем АХ = 0 и соответственно СО = 0. Минимально возможную ширину загона при этом следует выбирать из практических соображений.
Определяемая из (5.13), (5.14) или по другим соображениям, ширина загона должна удовлетворять условию
 или
или  (5.24)
(5.24)
Одновременно меньшая часть загона должна удовлетворять условию
Минимальная ширина загона С min при этом определяется из условия возможности реализации беспетлевого поворота всеми агрегатами группы (при одиночной работе следует принять Z = 1).
Если определяемое из (5.13) или (5.24) значение С окажется слишком малым по практическим соображениям, то следует выбрать ближайшее рациональное значение ширины загона С, кратное удвоенной ширине захвата агрегата 2В. Количество проходов агрегата на каждой части загона при этом также должно быть целым числом, Направление движения агрегата по отдельным частям загона следует выбирать с учетом особенностей технологического процесса и самого агрегата. Например, для уборочных агрегатов убранная часть загона должна находиться со стороны выгрузки урожая.
Движение перекрытием
Обычно при данном способе движения нет необходимости в дополнительных проходах для заравнивания борозд и гребней и обработки стыков. Значения ЕХ, АХ, ДХ :
ЕХ = 0,5;
 (5.25)
(5.25)
 (5.26)
(5.26)
Без обработки поворотных полос и в данном случае следует принять m П = 0. Аналогично предыдущему случаю значение С, определяемое на основании (5.13), должно удовлетворять условию осуществления беспетлевого поворота всеми Z агрегатами группы:
или  (5.27)
(5.27)
Последующее решение осуществляется в полной, аналогии с предыдущим случаем путем выбора рационального целого числа проходов.
Круговой способ движения
Холостые повороты в данном случае осуществляются в середине загона. Кроме того, имеют место, потери пути при рабочих поворотах (скрытый холостой ход). Для основных вариантов обычного кругового способа движения (от периферии к центру или от центра к периферии) имеем:
ЕХ = 0;
 (5.28)
(5.28)
 (5.29)
(5.29)
где e Б = VРП / V- отношение средней рабочей скорости при повороте. VРП к рабочей скорости при прямолинейном движении V ( e Б = 0,8).
Коэффициент b З аналогичен такому же коэффициенту в (5.21). При правильной организаций движения агрегата имеем b З =0,5. Соответствующую значению b З схему движения агрегата студент должен определить самостоятельно. Необходимость в дополнительных заездах для обработки стыков может возникнуть при движении от периферии к центру. При этом следует принять тД = 2 – если въезд и выезд осуществляются на одной стороне загона; тД = 1 – когда въезд и выезд совершаются на противоположных сторонах загона (чаще тД = 2).
Так как в данном случае ЕХ = 0, то из (5.12) имеем СО = ¥ (Ах > 0). Соответственно ширина загона выбирается из практических соображений с учетом размеров поля и сменной наработки агрегата; желательно, чтобы площадь загона не превышала сменную наработку агрегата.
Круговой способ движения «конверт».
Развернутые значения ЕХ, АХ, ДХ в данном случае имеют вид
ЕХ = 0;

 (5.30)
(5.30)
 (5.31)
(5.31)
где r П = dП / B - отношение dП из рис. 5.1 к ширине захвата В.
Остальные обозначения аналогичны предыдущим случаям. Минимальное значение dП приближенно определяется из равенства

Соответственно для r ПМ получим
 (5.32)
(5.32)
Численное значение коэффициента b З определяется в зависимости от принятого варианта работы агрегата. При движении от центра к периферии (например при вспашке) (рис. 5.1,6а) имеем:
b З = 0,5 – при переезде на соседний правый загон;
b З = 1,5 – при переезде на соседний левый загон
Если движение агрегата, происходит от периферии к центру (например при уборке зерновых) (рис. 5.1,6б), то получим:
b З = 0,5 – при переезде на соседний левый загон;
b З = 1,5 – при переезде на соседний правый загон.
Рациональный вариант движения агрегата выбирается с учетом типа агрегата и конкретных условий, работы. Необходимость в дополнительных заездах и соответствующее значение тД в (5.30) также определяются с учетом вида операции условий его выполнения по аналогии с ранее рассмотренными способами движения.
Так как ЕХ = 0, то имеем СО = ¥, поэтому рациональное значение ширины загона следует определять по аналогии с предыдущим случаем обычного кругового способа движения агрегата.
Челночный способ движения
Данный способ движения применим в основном, для случая работы каждого агрегата на отдельном загоне. При этом получено:
ЕХ = 0;

 (5.33)
(5.33)
Оптимальная ширина загона и в данном случае имеет значение СО = ¥. Соответственно и рациональное значение определяется по аналогии с круговым способом движения.
Если обработка загона осуществляется в двух взаимно перпендикулярных направлениях, то в (5.4) следует брать удвоенное значение правой части. Челночный способ движения обычно применяется при числе машин в агрегате не более двух-трех, так как для многомашинных агрегатов петлевые повороты становятся затруднительными и приводят к большим потерям времени смены.
При выполнении задания на компьютере следует выполнить много-вариантную учебно-исследовательскую работу по аналогии с предыдущими заданиями.
6. Итоговые результаты расчетов по пунктам, включая исходные данные.
| № пункта | Наименование и обозначение показателя или параметра | Результат расчёта с указанием размерности |
| Исходные данные | ||
Выполнил ________________________ Ф.И.О. студента
подпись
Принял ________________________ Ф.И.О. преподавателя
подпись
ЗАДАНИЕ 6
Date: 2015-09-02; view: 2853; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |