Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Переходные процессы в электроприводах постоянного тока
Переходные процессы возникают при переходе любого технического устройства из одного состояния в другое. Теория автоматического регулирования определяет динамические свойства звеньев в переходных процессах при помощи переходной характеристики h(t). Под переходной характеристикой понимают реакцию звена на единичное ступенчатое воздействие 1(t).
Такое воздействие соответствует мгновенной подаче напряжения на двигатель или его отключение. Кроме того, по такому закону может изменяться момент сопротивления.
Переходная характеристика рассчитывается по дифференциальному уравнению движения электропривода при известном Xвх.
h (t) определяется, например, при напряжении на якоре двигателя
Uя = 1 (t) Uя1; Uя1 = const. Типовым переходным процессом привода является апериодический. Экспериментально переходные процессы определяются при подаче на вход привода ступенчато изменяющегося напряжения. Работа электропривода определяется взаимосвязанными переходными механическими, электромагнитными и тепловым процессами. При этом


Можно назвать следующие причины возникновения переходных процессов:
-изменение Мс;
-изменение М, то есть переход привода с одной характеристики на другую, имеющий место при пуске, торможении, реверсе, регулировании скорости, изменении какого-либо параметра привода.
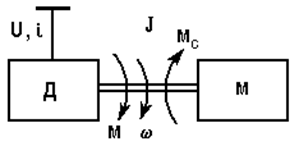
Объектом исследования служит идеализированная модель привода
 Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления (трения, резания, деформации и т. д.), массами и моментами инерции движущихся тел. Зависимости n, М, I от времени и продолжительность переходного процесса можно определить с помощью известного из механики уравнения движения. Для поступательного движущегося тела
Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления (трения, резания, деформации и т. д.), массами и моментами инерции движущихся тел. Зависимости n, М, I от времени и продолжительность переходного процесса можно определить с помощью известного из механики уравнения движения. Для поступательного движущегося тела
F - F c = mdv/dt.
Для вращающегося тела
М - M c = J d ω/ dt.
М - M c = J d ω/ dt. Основная задача при изучении переходных процессов сводится к определению зависимостей w (t), M(t) и i(t) для любых конкретных приводов в любых условиях.
При изучении переходных процессов мы будем полагать известными следующие исходные данные:
- начальное состояние: w нач, Мнач, iнач;
- конечное состояние: w кон, Мкон, iкон и соответствующая ему характеристика w (М);
- характер изменения во времени фактора, вызвавшего переходный процесс;
- параметры привода.
Все возникающие на практике задачи в целях их упорядоченного изучения разделим на четыре большие группы.
1. Преобладающей инерционностью в приводе является механическая инерционность (J); электрические инерционности (L) малы или не проявляются. Фактор, вызывающий переходный процесс, изменяется скачкообразно (мгновенно) то есть много быстрее, чем скорость.
Примеры задач, относящихся к этой группе: мгновенное учеличение и сброс нагрузки, пуск, реверс, торможение, регулирование скорости асинхронных двигателей при питании от сети, если не учитывать индуктивности обмоток; то же для двигателей постоянного тока независимого возбуждения если Ф = const, а Lя = 0, то же для двигателей последовательного или смешанного возбуждения, если Lя = Lв =0.
2. Преобладающая инерционность - механическая (J); индуктивности электрических цепей малы или не проявляются. Фактор, вызывающий переходный процесс, изменяется не мгновенно, то есть темп его изменения соизмерим с темпом изменения скорости w (“медленное” изменение воздействующего фактора).
Примеры: переходные процессы в системах управляемый преобразователь - двигатель постоянного тока, преобразователь частоты - асинхронный двигатель, если L = 0.
3. Механическая и электрическая инерционность соизмеримы; фактор, вызывающий переходный процесс, изменяется мгновенно.
Примеры: переходные процессы в приводе постоянного тока при Ф = var; то же при Ф = const, но Lя # 0, то же в системе источник тока - двигатель.
4. Учитываются несколько инерционностей, фактор, вызывающий переходный процесс, изменяется не мгновенно. Эти наиболее сложные задачи, относящиеся к замкнутым системам регулирования, мы рассмотрим очень кратко - они будут детально изучаться в других курсах.
6. Логические элементы «и-не» и «или-не» КМОП. Принцип работы. Достоинства и недостатки.
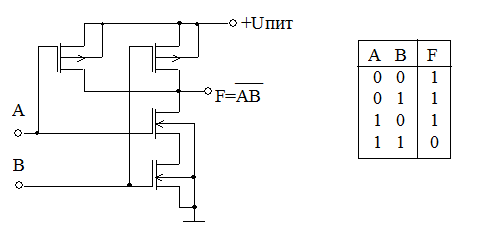
Рис 8.3.1. Схема КМОП логического элемента И–НЕ и его таблица истинности
Чтобы открыть оба нижних транзистора надо, чтобы на входе A и входе B была логическая единица, при этом оба верхних транзистора закроются и на выходе Q будет логический ноль. Если хотя бы на одном или на обоих входах будет логический ноль, то хотя бы один из нижних транзисторов закроется, один из верхних откроется, при этом на выходе будет логическая единица.
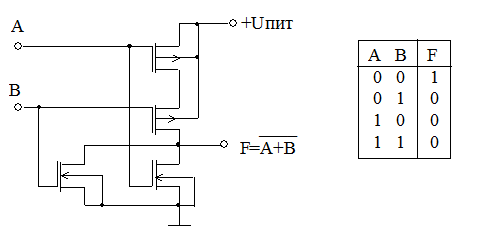
Рис 8.3.1. Схема КМОП логического элемента ИЛИ–НЕ и его
таблица истинности
Если на входах A или B (или на обоих) логическая единица, то откроется один или оба из нижних транзисторов, при этом закроется один или оба верхних транзистора, тогда на выходе логический ноль. Если на обоих входах логический ноль, то закроются оба нижних и откроются оба верхних транзистора, при этом на выходе логическая единица.
Date: 2015-08-15; view: 1399; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |