Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Тормозные режимы
ЛАБОРАТОРНАЯ РАБОТА №3
ИСПЫТАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
Выполнил: студент гр.ЭЭ419
Машкова М.Л.
Проверил: Лысенко О. А.
Омск 2012
Цель работы.
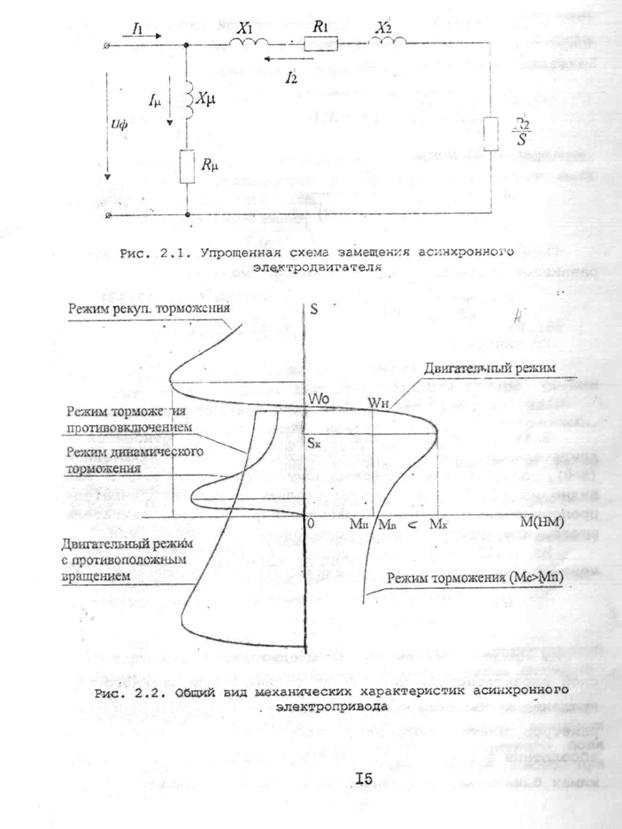
Изучение режимов работы асинхронного электропривода, способов управления и опытное определение механических w=f(M) характеристик асинхронного электродвигателя (АД) с короткозамкнутым (к.з.) ротором во всех режимах его работы.
Характеристика режимов работы асинхронного электродвигателя.
Для асинхронных электродвигателей возможны различные режимы работы (двигательные и тормозные).
Двигательные режимы
Двигательных режимов два − в прямом направлении вращения ротора и в обратном. Действие АД основано на принципе вращающегося магнитного поля.
При подведении к фазным обмоткам статора переменного трехфазного напряжения. в статоре образуется вращающееся магнитное поле.
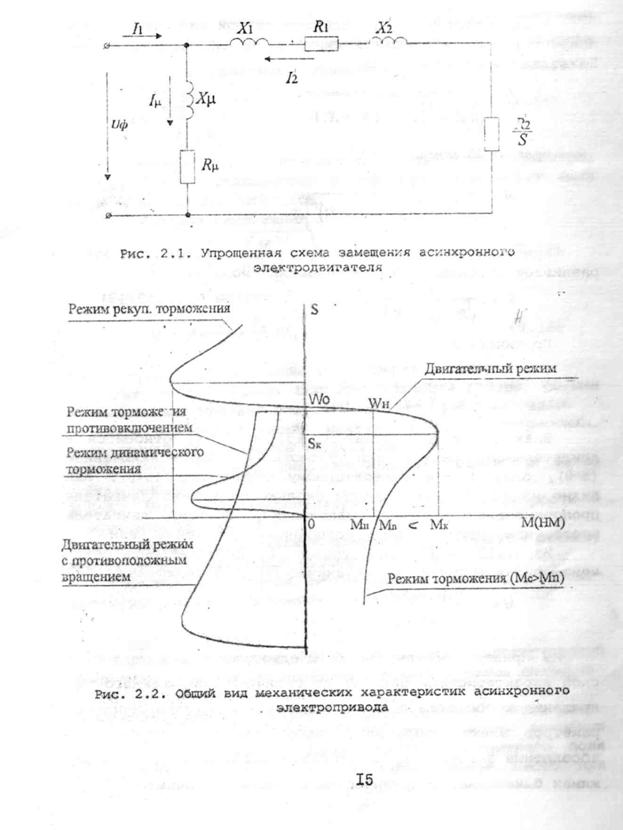
Тормозные режимы
Тормозных режимов три − с отдачей электрической энергии в сеть, режим противовключения и режим динамического торможения.
Тормозной режим с отдачей энергии в сеть (режим рекуперативного торможения) возможен при скорости вращения ротора, превышающей скорость вращения магнитного поля (отрицательное скольжение), то есть имеет место при w>w0.
При переходе двигателя в генераторный режим в следствии изменения знака момента меняет знак активная составляющая тока ротора. В этом случае асинхронная машина от дает активную энергию (мощность) и потребляет реактивную, необходимую для возбуждения. Механическая характеристика в этом режиме является продолжением механической.
Режим противовключения (S<2). Для осуществления режима противовключения необходимо переключить фазные обмотки статора работающего двигателя “на обратный ход” (поменять полярность двух фаз). При этом изменяется правление вращения магнитного поля статора, возникает тормозной момент, снижается скорость вращения. Когда скорость ротора уменьшится до нуля, двигатель должен быть отключен от сети, так как в противном случае ротор начнет вращаться в обратную сторону, то есть осуществится реверс двигателя.
Режим динамического торможения (S<1). Для осуществления динамического торможения фазные обмотки статора отключаются от сети переменного тока и подключаются к источнику постоянного тока. При этом вместо вращающегося магнитного поля в магнитной цели машины образуется неподвижное магнитное поле, в котором будет продолжать вращаться ротор двигателя (по инерции или в силу других причин, зависящих от вида исполнительного механизма). В проводниках ротора будут индуктироваться токи, взаимодействие которых с магнитным полем статора и обусловит электромагнитный тормозной момент, направленный (согласно правилу Ленца) в сторону, противоположную вращению.
Лабораторный стенд
В лабораторный стенд входят:
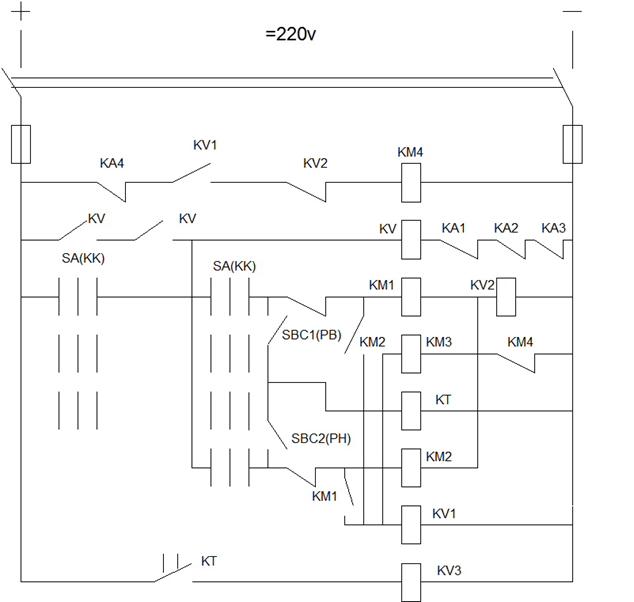
1) Типовая панель управления, предназначенная для непосредственного управления асинхронным электродвигателем с к.з. ротором во всех режимах его работы. Электрическая схема типовой панели управления представлена на рис. 2.3;
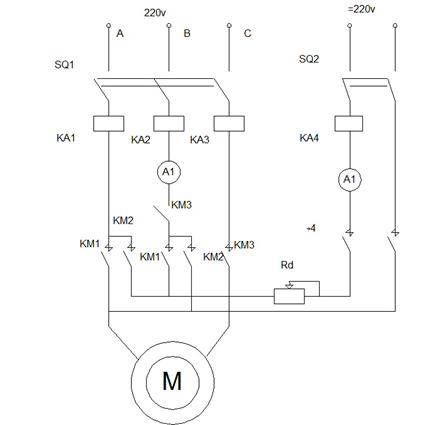
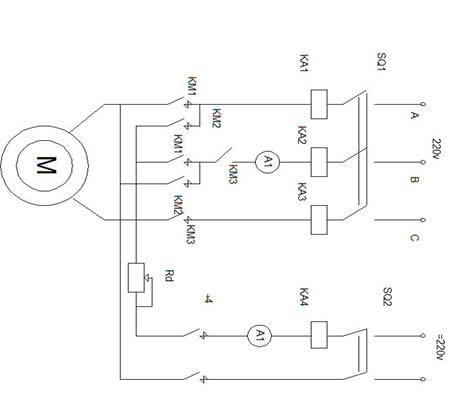
2) Четырехмашинный агрегат, позволяющий опытным путем получить необходимые данные для построения механических характеристик испытуемого электродвигателя во всех режимах его работы. Электрическая схема четырехмашинного агрегата приведена на рис. 2.4;
3) Стенд управления, предназначенный для установки на нем коммутационных аппаратов и регулировочных реостатов, а также измерительных приборов, включаемых в электрическую схему четырехмашинного агрегата.
Ниже подробно дается описание лабораторного стенда, подготовка его к работе при испытании асинхронного электродвигателя с к.з. ротором.
Типовая панель управления (электрическая схема) содержит:
QS1 ("1P"), QS2 ("2P") − линейные (вводные) рубильники и пакетный выключатель QW ("3P");
FA2 − предохранители, предназначенные для защиты цели управления от токов короткого замыкания;
KV − реле напряжения − для защиты электродвигателя от самозапуска при значительном снижении или исчезновении питающего напряжения и последующем его восстановлении;
КМ1, КМ2, КМЗ − контакторы включения электродвигателя в прямом направлении (вперед) вращения ротора и обратном (назад);
КМ4 − контактор динамического торможения;
КА1, КА2, КАЗ, КА4 − реле максимального тока для защиты электродвигателя от больших перегрузок и токов короткого замыкания;
КТ − реле времени для контроля торможения электродвигателя противовключением (перемена полярности двух фаз);
SA ("КК") − универсальный ключ (переключатель) управления (командоконтроллер);
SBC1 ("ПВ") − переключатели (тумблеры) управления реле времени;
QW1 ("P1") и QW2 ("P2") − пакетные выключатели в цепях возбуждения машин постоянного тока;
QW3 ("P3") − пакетный выключатель в якорной цепи машины постоянного тока.
Типовая панель позволяет получать двигательные и тормозные режимы электродвигателя.
Для получения двигательного режима необходимо (см. рис. 2.3):
a) включить рубильники QS1 ("Р1") и QS2 ("Р2");
b) рукоятку универсального выключателя SA("KK"), установленную на стенде управления, поставить в нулевое положение;
c) повернуть рукоятку универсального переключателя SA ("KK") вправо или влево через нулевое положение в положение 1 в зависимости от требуемого направления вращения ротора. В нулевом положении рукоятки универсального переключателя срабатывает реле напряжения KV, которое подготавливает нижнюю часть схемы управления к работе. В правом или левом положении рукоятки универсального переключателя включаются контакторы КМ1 и КМЗ или КМ2 и КМЗ, двигатель включается в прямом направлении вращения ротора или в обратном. Кроме этого, получают питание катушки блокировочных реле KV2 и KV3, контакты которых находятся в цепи катушки контактора динамического торможения КМ4. Контакт KV2 размыкается мгновенно, а контакт КV1 замыкается через малую выдержку времени, чем предотвращается подача напряжения на катушку контактора динамического торможения.
Для получения торможения противовключением (перемена полярности двух фаз) необходимо:
a) поставить переключатель SBC1 ("ПН") или SBC2 ("ПН") в замкнутое положение “от себя”, в зависимости от направления вращения ротора;
b) повернуть рукоятку универсального переключателя SA ("КК") влево или вправо через нулевое положение в положение 1 в зависимости от направления вращения ротора;
c) подобрать уставку реле времени КТ таким образом, чтобы электродвигатель отключился от сети при скорости n=0, а не вращался в другую сторону. Изменение уставки реле времени КТ производится при снятом напряжении. При выполнении указанных переключений изменяется чередование фазных напряжений в обмотках статора и направление вращения магнитного поля статора. Противоположно направленный ротору магнитный поток статора тормозит ротор. При правильно подобранной выдержке времени реле КТ оно срабатывает (n=0) и подаст питание на катушку блокировочного реле KV3. Последнее своими нормально замкнутыми контактам, размыкает цепь контакторов КМ1, КМ2, КМЗ и реле KV2 и KV1. Электродвигатель отключается от сети.
Динамический режим торможения заключается в следующем. Необходимо обмотки статора вращающегося электродвигателя отключить от трехфазной сети и подключить их к источнику постоянного тока (повернуть ключ SA ("KK") в нейтральное положение и включить пакетный выключатель QW ("ЗР"), установленный на стенде управления). До проведения предварительно необходимо расчетным путем определить значение постоянного тока, который должен быть в обмотках статора (схема соединений обмоток статора АД - треугольник). В режиме динамического торможения контактор КМ4 включен, а контакторы КМ1, КК2 и КМЗ отключены. В конце торможения реле KV1 размыкает свой контакт в цепи катушки контактора КМ4, контактор КМ4 срабатывает в обратном направлении (отключается). Наличие контактов KV1 и KV2 в цепи катушки контактора динамического торможения КМ4 предотвращает одновременное получение питания катушками контакторов КМ1, КМ2, КМЗ и КМ4 (исключается "наложение" сети постоянного тока на сеть переменного тока).
При значительных перегрузках по току или при коротких замыканиях в силовой цепи электродвигателя срабатывает одно или несколько реле максимального тока и электродвигатель отключается от источника питания.
Опытное получение режимов работы асинхронного двигателя с использованием только одной типовой панели управления производится без снятия показаний измерительных приборов.
Четырехмашинный агрегат состоит из следующих электрических машин:
1) Испытуемый электродвигатель − трехфазный асинхронный электродвигатель с к.з. ротором (ИД).
2) Нагрузочная машина постоянного тока независимого возбуждения (HM1), которая с помощью муфты жестко соединена с испытуемым электродвигателем.
3) Машина постоянного тока независимого возбуждения (НМ2).
4) Асинхронный электродвигатель с к.з. ротором (АД), жестко связанный муфтой с машиной НМ2.
Таким образом, агрегат состоит из двух пар электрических машин: первая пара ИД и НМ1 (агрегат "переменной скорости") и вторая пара АД и НМ2 (агрегат "постоянной скорости").
Чтобы заставить испытуемый электродвигатель работать в различных режимах, нагрузочная машина НМ1 ставится в различные условия: работает то в качестве генератора, приводимого в движение испытуемым электродвигателем (двигательный режим для испытуемого электродвигатели), то в качестве двигателя, вращающего испытуемую машину (генераторный режим для испытуемого электродвигателя).
Агрегат постоянной скорости играем роль промежуточного звена передачи энергии.
Подготовка агрегата к выполнению работы заключается в следующем (см. рис. 2.4).
1. Поставить все коммутационные аппараты в отключенное положение.
2. Испытуемый электродвигатель включается в трехфазную сеть рубильниками QS1 ("1P") и QS2 ("2P"), установленными на типовой панели управления. Тумблеры SBC1("ПВ") и SBС2 ("ПН"), установленные на стенде управления поставить в разомкнутое (среднее) положение. После чего рукоятку универсального переключателя SA ("KK") повернуть вправо - положение 1.
3. Включается цепь возбуждения нагрузочной машины НМ1 (замкнуть пакетный выключатель QW1 ("P1"), усыновленный на стенде управления, а затем агрегат постоянной скорости (нажать на кнопку "пуск", установленную на стенде управления). Включается цепь возбуждения нагрузочной машины НМ2 (включить пакетный выключатель QW2 ("Р2") и тумблер SBC3 ("T1") в положение П1, установленные на стенде управления) и устанавливается возбуждение обеих нагрузочных машин реостатами R1, и R2, таким образом, чтобы их напряжения были равны. При этом пакетный выключатель QW3 ("P3") должен быть разомкнут. Затем проверяется полярность зажимов и равенство напряжений тумблером SBC4 ("T2"), после чего пакетным выключателем QW3 ("P3") замыкается цепь их якорей.
4. Работу следует начинать со снятия механической характеристики испытуемого двигателя в генераторном режиме Для этого необходимо, чтобы скорость вращения его ротора была больше синхронной, что достигается при помощи машины НМ1, которая должна работать в двигательном режиме со скоростью, превышающей скорость испытуемого двигателя. Выполнение этого условия связано с увеличением напряжения на зажимах машины НМ2, работающей в режиме генератора. Увеличение напряжения на зажимах машины НМ2 осуществляется путем увеличения тока ее возбуждения с помощью реостата R2 в цепи возбуждения. Испытуемый двигатель работает в тормозном режиме асинхронного генератора, отдавая активную энергию в трехфазную сеть. Такой режим называется тормозным с рекуперацией энергии.
5. Установив ток возбуждения нагрузочной машины НМ2 таким, чтобы испытуемой двигатель был нагружен до значения 1,1∙Iн записывают показания приборов, после чего постепенно уменьшают ток возбуждения машины НМ2, отчего скорость вращения и нагрузка испытуемого двигателя будут снижаться. При этом фиксируют показания приборов для пяти-шести значений нагрузки. Уменьшением тока возбуждения машины НМ2 осуществляется плавный переход работы ИД из генераторного режима в двигательный. При этом ИД нагружается машиной НМ1, которая переходит в режим генератора так как ее э.д.с. становится больше э.д.с. машины НМ2. В этом режиме ток в цепи якорей обеих нагрузочных машин пропорционален разности двух э.д.с.  (2.20) при дальнейшем увеличении нагрузки испытуемого двигателя скорость ее падения уменьшается до полной остановки, режим короткого замыкания). В режиме короткого замыкания при неподвижном роторе ИД может находиться ограниченное время, так как на зажимах обмотки статора ток значительно выше номинального. В двигательном режиме также необходимо записать показания приборов для пяти-шести значений нагрузки. Скорость вращения ротора ИД измеряется тахометром!
(2.20) при дальнейшем увеличении нагрузки испытуемого двигателя скорость ее падения уменьшается до полной остановки, режим короткого замыкания). В режиме короткого замыкания при неподвижном роторе ИД может находиться ограниченное время, так как на зажимах обмотки статора ток значительно выше номинального. В двигательном режиме также необходимо записать показания приборов для пяти-шести значений нагрузки. Скорость вращения ротора ИД измеряется тахометром!
6. Чтобы получить данные для построения механической характеристики ИД в тормозном режиме противовключения (Мс > Мп), необходимо нагрузочную машину НМ1 перевести в режим двигателя, вращающегося в направлении, противоположном вращающемуся магнитному полю ИД, и тем самым имитировать Мс > Мп, при котором ИД будет работать в тормозном режиме. Для перевода нагрузочной машины НМ1 в двигательный режим необходимо, чтобы вращающий момент машины НМ1 преодолел противоположный ему момент заторможенного испытуемого двигателя. С этой целью следует увеличить ток якоря машины НМ1, сохранив его прежнее направление. При заторможенном роторе ИД ток в цепи якоря нагрузочной машины НМ1  (2.21) при работе в режиме противовключения
(2.21) при работе в режиме противовключения  (2.22) Следовательно, для увеличения тока в якоре машины НМ1потребуется увеличение разности э.д.с. обеих нагрузочных машин, но т.к как э.д.с. машины НМ1 переменит свой знак (по сравнению с предыдущим режимом работы в режиме генератора), то для сохранения прежнего направления тока в якоре машины КМ1 потребуется изменить знак э.д.с. машины НМ2, которая должна стать теперь генератором, питающим машину НМ1, а асинхронная машина агрегата постоянной скорости - ее двигателем. Для создания таких условий работы всех машин нужно переменить направление тока в цепи возбуждения нагрузочной машины НМ1 (тумблер SBC3 ("T1") поставить в положение П2, установленный на стенде управления) и увеличить его в такой степени, чтобы ток в якоре нагрузочной машины НМ1 достиг значения, при котором она станет вращать ИД, создавая условия торможения противовключением. Как только наступит для ИД режим противовключения (Мс > Мп), записать показания приборов для построения механической характеристики в этом режиме.
(2.22) Следовательно, для увеличения тока в якоре машины НМ1потребуется увеличение разности э.д.с. обеих нагрузочных машин, но т.к как э.д.с. машины НМ1 переменит свой знак (по сравнению с предыдущим режимом работы в режиме генератора), то для сохранения прежнего направления тока в якоре машины КМ1 потребуется изменить знак э.д.с. машины НМ2, которая должна стать теперь генератором, питающим машину НМ1, а асинхронная машина агрегата постоянной скорости - ее двигателем. Для создания таких условий работы всех машин нужно переменить направление тока в цепи возбуждения нагрузочной машины НМ1 (тумблер SBC3 ("T1") поставить в положение П2, установленный на стенде управления) и увеличить его в такой степени, чтобы ток в якоре нагрузочной машины НМ1 достиг значения, при котором она станет вращать ИД, создавая условия торможения противовключением. Как только наступит для ИД режим противовключения (Мс > Мп), записать показания приборов для построения механической характеристики в этом режиме.
7. Получение данных для построения механической характеристики асинхронного двигателя в режиме динамического торможения производится при включении испытуемого двигателя по схеме (рис. 2.4). Необходимо обмотку статора вращающегося двигателя отключить от трехфазной цепи и подключить ее к источнику постоянного тока (повернуть ключ SA ("KK") в нейтральное положение и включить QW4("3P"), установленные на стенде управления). До проведения опыта предварительно необходимо расчетным путем определить значение постоянного тока, который должен быть в обмотке статора (схема соединения обмоток статора ИД - треугольник). Время с начала торможения и до полной остановки будет зависеть от тормозного момента, возникающего на валу ИД, запаса кинетической энергии агрегата, определяемой его маховым моментом GД2, и момента статического сопротивления Мс. Вследствие небольшого суммарного момента агрегата ИД-НМ1 время полного торможения до полной остановки оказывается очень малым. Поэтому для получения данных при построении механической характеристики ИД в этом режиме следует искусственно увеличить время торможения путем создания дополнительного вращающего момента на валу испытуемого двигателя, имитируя как бы больший запас кинетической энергии, чем фактически имеют массы самих машин. Для этого поступают следующим образом. Испытуемый двигатель и асинхронный двигатель постоянной скорости включают в трехфазную сеть. Далее устанавливают возбуждение обеих нагрузочных машин с таким расчетом, чтобы их напряжения были равны, проверяют полярность соединяемых зажимов. В этом случае ИД будет работать в двигательном режиме на холостом ходу. Уменьшая ток возбуждения нагрузочной машины НМ2, создают нагрузку на валу испытуемого двигателя (по возможности номинальную или близкую к ней). А затем ИД отключают от сети и подключают обмотку статора к источнику постоянного тока. Увеличивая ток возбуждения нагрузочной машины НМ2, переводят машину НМ1 на работу в режиме двигателя для вращения ротора испытуемого двигателя. Уменьшая ток возбуждения машины НМ2, постепенно снижают скорость вращения ИД и записывают показания приборов для пяти-шести значений нагрузки.
|
|
Схема управления асинхронным двигателем с кз роотором

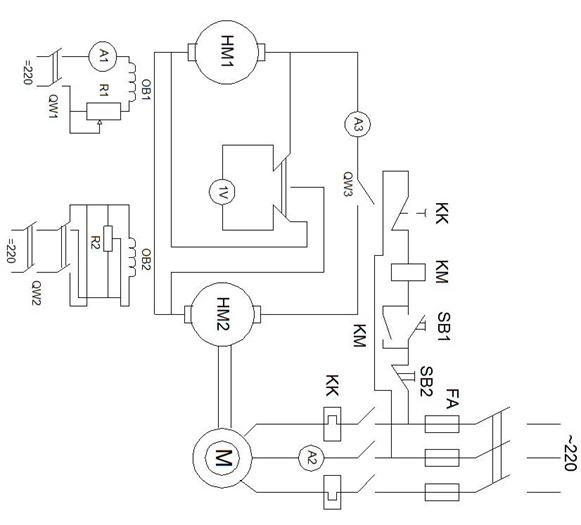
Паспортные данные электродвигателя: АОЛ2-32-4У3
Р=3кВт, s=4.70%, η=83.5%, cosφ=0.84,  об/мин,
об/мин,  об/мин,
об/мин,  ,
,  ,
,  ,
, 


Расчетные выражения:
 ;
;  ;
;  ;
; 
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
; 
 ;
;  ;
;
Результаты расчета:
 ;
;
 ;
;
 (Н*м);
(Н*м);
 (Н*м);
(Н*м);

 (Н*м);
(Н*м);
 %;
%;
 (А);
(А);
 (Ом);
(Ом);
 ;
;
 (Ом);
(Ом);
 (Ом);
(Ом);
 (Ом);
(Ом);
 (Ом);
(Ом);
 (Ом);
(Ом);
 (А);
(А);
 %;
%;
 (Н*м);
(Н*м);
 (А);
(А);
Механические характеристики асинхронного электропривода
Date: 2015-07-23; view: 1243; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |