Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Існують такі типи топології локальних мереж: зірка, кі- льце, шина, дерево, комбінована. 3 page
Pc max.
| P |
c min
Десятковий логарифмічний динамічний діапазон вимірю- ється у децибелах [дБ]-децибел.
Логарифмічний діапазон за напругою

 D 20 lg U c max[дБ].
D 20 lg U c max[дБ].
c U
c min
Під ємністю сигналу розуміють добуток трьох його харак-
теристик:
Tc – тривалість сигналу,
Fc – ширина спектру та
Dc –
 динамічний діапазон рівней сигналу
динамічний діапазон рівней сигналу
де D
 10 lg
10 lg

| P |
Vc TcFc Dc,
c
c min
Добуток аналогічних параметрів каналу називають ємніс- тю каналу:
 Vk TkFkDk,
Vk TkFkDk,
де Tk – час використання каналу, Fk
– полоса частот, яку пропус-
кає канал, Dk
– динамічний діапазон сигналів, що передаються
по одному каналу зв’язку.
 Передача сигналу по каналу можлива лише за умови, що
Передача сигналу по каналу можлива лише за умови, що
Tk Tc; Fk
Fc; Dk
Dc.
5.6  Основні електричні величини
Основні електричні величини
До основних понять теорії електричних кіл відносяться: електричний струм, сила електричного ст руму, електричний потенціал, електрична напруга, елекрторушійна сила.
 Електричний струм у колі виникає під дією джерела енер- гії. Отже розглянемо поняття електричного струму.
Електричний струм у колі виникає під дією джерела енер- гії. Отже розглянемо поняття електричного струму.
Електричний струм – це явище спрямованого руху носіїв електричних зарядів.
Струм може мати додатний чи від’ємний знак, який визна- чає напрям переміщення зарядів відносно перетину провідника. За напрям струму беруть напрям руху позитивних зарядів.
 Електричний струм в усталеному режимі може бути пос- тійним або змінним. Постійним називають такий струм, напрям і величина, якого не змінюються з часом. Змінним називають струм напрям і величина якого змінюються з часом. Для кількіс- ної характеристики електричного струму вводять поняття сили електричного струму.
Електричний струм в усталеному режимі може бути пос- тійним або змінним. Постійним називають такий струм, напрям і величина, якого не змінюються з часом. Змінним називають струм напрям і величина якого змінюються з часом. Для кількіс- ної характеристики електричного струму вводять поняття сили електричного струму.
Сила електричного струму – це скалярна величина, яка визначає кількість заряду, що переноситься зарядженими части- нами крізь перетин провідника за одиницю часу.
Силу електричного струму можна визначити за допомо- гою такої формули
 i dq.
i dq.
dt
Одиницею сили струму служить ампер (скорочено позна- чається – А). Струм в один ампер – це такий струм, коли за одну секунду через поперечний переріз провідника протікає електри- чний заряд величиною один кулон.
 Як було зазначено, однією з умов існування електричного струму є наявність джерела електричної енергії, яке б створюва- ло різницю потенціалів, а отже напругу. Дамо визначення цим двом поняттям.
Як було зазначено, однією з умов існування електричного струму є наявність джерела електричної енергії, яке б створюва- ло різницю потенціалів, а отже напругу. Дамо визначення цим двом поняттям.
Електричний потенціал – це фізична величина, яка чисе- льно дорівнює роботі поля по перенесенню одиничного заряду з нульової точки до точки простору.
Електричний потенціал вимірюється у вольтах [В] та поз- начається літерою φ.
 Через електричний потенціал можна визначити електричну напругу.
Через електричний потенціал можна визначити електричну напругу.
Електрична напруга – це різниця потенціалів.
Електрична напруга теж вимірюється в вольтах. Одиницею напруги служить вольт (скорочено – В).
Зобразимо деяку ділянку електричного кола, через яку проходить струм I у вигляді прямокутника і позначимо кінці (за- тискачі) цієї ділянки літерами a та b (рис. 2.5). Різницю електри- чних потенціалів точок a та b представляє напруга на даній ді- лянці кола
Uab=φa– φb.
 _ I +
_ I +
 a
a
b
U
Рисунок 2.5
При розрахунках додатний напрям струмів та напруг ви- бирають довільно. Ми будемо вибирати напрями струмів та на- пруг у відповідності до рис. 1.1.
 Окрім сили електричного струму у провіднику може існу- вати електрорушійна сила.
Окрім сили електричного струму у провіднику може існу- вати електрорушійна сила.
Електрорушійна сила (ЕРС) – це фізична величина, яка чисельно дорівнює роботі сторонніх сил з перенесення одинич- ного додатного заряду від від’ємного полюса до додатного все- редині джерела.
Джерелом ЕРС може бути гальванічний елемент, акумуля- торна батарея, електричний генератор, термоелемент тощо. Прикладом сторонніх сил може бути хімічна реакція в гальвані- чному елементі.
Зображення джерела ЕРС подане на рис. 2.6. Напруга та ЕРС вимірюються у вольтах (скорочено – В).
Е
 _ +
_ +
a
b
Рисунок 2.6
 ТЕМА 6 ПОНЯТТЯ ПРО СИСТЕМИ УПРАВЛІННЯ
ТЕМА 6 ПОНЯТТЯ ПРО СИСТЕМИ УПРАВЛІННЯ
6.1  Основні поняття у теорії керування
Основні поняття у теорії керування
 Зміна станів об'єкта, системи або процесу, що ведуть до досягнення поставленої мети, називається керуванням.
Зміна станів об'єкта, системи або процесу, що ведуть до досягнення поставленої мети, називається керуванням.
Матеріальний об'єкт будь-якої природи, на зміну станів якого спрямовані керуючі дії, називається об'єктом керуван- ня.
 Такими об'єктами керування можуть бути автомобіль; хворий, що лікується; людина, яка навчається; продукція, що виробляється; економіка країни; військова операція; науко- вий експеримент. Сукупність значень параметрів об'єкта ке- рування називається його станом.
Такими об'єктами керування можуть бути автомобіль; хворий, що лікується; людина, яка навчається; продукція, що виробляється; економіка країни; військова операція; науко- вий експеримент. Сукупність значень параметрів об'єкта ке- рування називається його станом.
Будь-які зовнішні дії на об'єкт керування, що призво- дять до зміни його станів, називаються керуючими діями.
Так, ремонт автомобіля, який приводить його із неспра- вного стану у справний, є керуючою дією. Керуючою дією є звільнення та приймання на роботу персоналу та робітників на виробництві, змінення номенклатури продукції, що випус- кається, накази командира і т.д.
 Керуюча дія передається через сигнал, що надходить на вхід об'єкта керування і впливає на його вихідну величину.
Керуюча дія передається через сигнал, що надходить на вхід об'єкта керування і впливає на його вихідну величину.
Характер зміни керуючої дії за часом називається зако- ном керування.
Стан, до якого прагнуть перевести об'єкт керування, нази- вається метою керування. Метою або завданням керування може бути, наприклад, одержання бажаного ефекту при лікуванні хво- рого; досягнення високої якості продукції, що випускається під- приємством, або зниження її собівартості; підтримка заданого ступеня матеріального добробуту суспільства; отримання пере- ваги над противником в бою.
Саме керування, здійснюване за часом, є цілеспрямованим
процесом з вироблення керуючих дій, спрямованих на змінення
станів об'єкта керування, основаних на переробці інформації про нього.
Для процесу керування необхідно знати і передбачити по- ведінку об'єкта керування при різних можливих зовнішніх діях на нього.
Зовнішні фактори, які діють на об'єкт керування та обумов- люють відхилення величин, що регулюються, від установлених, називаються збурюючими діями {факторами).
Збурюючі фактори звичайно є випадковими величинами і завчасно не можуть бути надійно враховані. Так, водій автомобі- ля в довгостроковій перспективі заздалегідь не може спрогнозу- вати погоду, аварійні ситуації на дорозі, технічні несправності. Хоча деякі уявлення про всі ці фактори він, певна річ, має і в ці- лому враховує їх перед поїздкою.
Так чи інакше їх негативну дію при появі він намагається ліквідувати керуючими діями: ховається від непогоди, знижує швидкість, ремонтує автомобіль. При цьому здійснюється ком- пенсація збурюючих факторів керуючими діями.
Властивість, яка характеризує можливість приведення об'є- кта керування у заданий стан за допомогою керуючих дій, нази- вається його керованістю.
Об'єкт вважається керованим, якщо існує керування U(t), яке забезпечує його переведення за час і із довільного початково- го стану х0 в довільний стан хі за кінцевий час.
Більш точно поняття керованості сформулював американ-
ський вчений Р.Е. Калман. Він ввів поняття повної та часткової
керованості.
Керування, яке переводить за кінцевий час об'єкт керуван- ня з будь-якого заданого початкового стану х0 в будь-яке інше x(t) у тому числі і кінцеве хк, називається повною керованістю і час- тковою – якщо такої можливості не існує.
Таким чином, перш ніж розв'язувати задачу керування, не- обхідно з'ясувати, чи має вона розв'язок, тобто визначити, чи є в об'єкті керування потрібний стан, і якщо він є, то чи можливо його досягти за допомогою керуючих дій, які наявні.
Наприклад, якщо водій автомобіля хоче розігнати його до швидкості 140 км/год, то необхідно спочатку дізнатись, чи мо- жливо за технічними характеристиками досягти цього взагалі, а потім з'ясувати, чи може саме цей автомобіль за своїм техніч- ним станом здійснити це зокрема.
Основу складних інформаційних моделей створюють ма- тематичні моделі, які враховують не тільки дію на об'єкт в да- ний момент часу, айв попередні. З метою побудови математич- них моделей використовуються диференційні рівняння, а також інші складні математичні підходи і методи.
Найбільш вивчені об'єкти керування, що мають технічну природу. Відповідно і теорія керування ними виявилася най- більш розробленою. Вона має назву теорії автоматичного ке- рування
6.2 Основні принципи керування
6.2.1  Принцип керування за збуренням
Принцип керування за збуренням
 Керування ґрунтується на використанні низки принципів, найбільш простий з яких – це принцип керування за збуренням відомий також як принцип розімкненого керування.
Керування ґрунтується на використанні низки принципів, найбільш простий з яких – це принцип керування за збуренням відомий також як принцип розімкненого керування.
Принцип керування за збуренням припускає компенсу- вання впливу збурень у процесі вироблення керуючих дій, вели- чина і напрямок яких завчасно задані.
Наприклад, можна вести автомобіль за відомим маршру- том за допомогою керуючого автомата, якщо до поїздки ввести в нього інформацію про всі необхідні для цієї мети керуючі дії. При цьому припускається, що завчасно відомі ті чи інші збу- рюючі фактори. Цей принцип також використовується при польоті на автопілоті, при керуванні по копіру в ткацьких верс- татах, при пошиві за шаблоном.
На жаль, далеко не завжди можна урахувати усі збурюючі фактори, і тому керування за збуренням в багатьох задачах ке- рування не використовується. Помилки, які викликані неском-
пенсованими збуреннями, призводять до недостатньо точного, а інколи й до аварійного керування. У той самий час керування за збуренням є найбільш простим і швидкодіючим, а при ретель- ному вимірюванні збурень та врахуванні характеристик об'єкта керування – і достатньо точним.
6.2.2  Принцип негативного зворотного зв’язку
Принцип негативного зворотного зв’язку
 Другий принцип керування є основою всієї сучасної тео- рії керування. Цей принцип називається принципом негативно- го зворотного зв'язку, або просто принципом зворотного зв'яз- ку. Вперше застосували цей принцип керування незалежно один від одного у 1765 р. І.І. Ползунов для регулювання рівня води і у 1784 р. – Дж. Уатт для центробіжного регулювання швидкості обертання двигунів. Тому принцип зворотного зв'я- зку ще називають принципом Ползунова-Уатта.
Другий принцип керування є основою всієї сучасної тео- рії керування. Цей принцип називається принципом негативно- го зворотного зв'язку, або просто принципом зворотного зв'яз- ку. Вперше застосували цей принцип керування незалежно один від одного у 1765 р. І.І. Ползунов для регулювання рівня води і у 1784 р. – Дж. Уатт для центробіжного регулювання швидкості обертання двигунів. Тому принцип зворотного зв'я- зку ще називають принципом Ползунова-Уатта.
Використання принципу зворотного зв'язку збільшує або зменшує відхилення дійсних значень величини, що регулюється, від заданого значення.
Таким чином, принцип зворотного зв'язку називають ще принципом керування за відхиленням.
Принцип зворотного зв'язку використовується тоді, коли вплив збурюючих факторів значний і вони раніше невідомі, так що знехтувати ними або їх урахувати практично неможливо. Керування здійснюється у цьому випадку за кінцевим сумісним результатом впливу керуючих дій та збурюючих факторів. В цьому як раз і складається цінність принципу зворотного зв'язку, для використання якого нема необхідності у попередньому ви- мірюванні збурюючих і факторів і дослідженні характеру потрі- бних керуючих дій. В результаті їх вплив враховується в процесі керування за знаком і величиною відхилення сигналу зворотно- го зв'язку. Цей сигнал дозволяє стежити за ефектом регулюван- ня та усувати недо- і перерегулювання, збільшуючи тим самим точність керування. При цьому, якщо сигнал зворотного зв'язку збільшується, то керуюча дія повинна зменшитись і, навпаки, якщо сигнал зворотного зв'язку зменшується, то керуюча дія
збільшується. Це і є проявом негативного зво ротного зв'язку. Прикладом дії принципу зворотного зв'язку є керування автомо- білем.
Недоліком керування із зворотним зв'язком є можливість втрати його стійкості. У цьому випадку регулюючі дії не всти- гають за зміненнями величини, що регулюється, і тоді замість послаблення впливу керуючих сигналів на вхід об'єкта керу- вання за допомогою негативного зворотного зв'язку може здій- снитися їх підсилення і як наслідок – втрата стійкості керуван- ня.
6.2.3  Неосновні принцип керування
Неосновні принцип керування
Крім розглянутих вище основних принципів керування, існує ряд інших, досить значущих. Розглянемо деякі з них.
Принцип децентралізованого керування використовується при керуванні великою кількістю складних об'єктів керування. Керування кожним з них здійснюється здебільшого самостійно. Крім того, при цьому вирішується загальне завдання керування з узгодженням окремих завдань керування між собою.
Принцип централізованого керування застосовується у ви- падку, коли кількість об'єктів керування невелика і їх роботу необхідно жорстко узгоджувати між собою. У цьому випадку існує одне загальне централізоване завдання керування.
Принцип екстремального керування застосовується у ви- падку, коли підтримується режим керування, що характеризу- ється максимально можливими деякими показниками якості ке- рування із втратою інших.
Принцип адаптивного керування використовується у ви- падку, коли необхідно процес керування пристосовувати до змін збурюючих факторів і змін станів об'єкта керування з ме- тою поліпшення якості керування.
Принцип випадкового керування виникає у неповністю визначених ситуаціях. Керування вибирається з деяких можли- вих стратегій, як правило, випадково.
Принцип програмного керування використовується у ви- падку, коли необхідно, щоб стани об'єкта керування змінюва- лися згідно із заздалегідь заданим законом. У цьому випадку між станами об'єкта керування і керуючими впливами встанов- люється функціональний зв'язок. Закон зміни керуючих впли- вів встановлюється при цьому апріорно.
Принцип стежачого керування працює аналогічно до принципу програмного керування з тією відмінністю, що зміни керуючих впливів заздалегідь не встановлені і є випадковими.
6.3 Узагальнена структура систем керування
 Розглянуті вище завдання керування вирішуються за допо- їмо систем керування.
Розглянуті вище завдання керування вирішуються за допо- їмо систем керування.
Система керування – це сукупність об'єктів керування та технічних засобів дії на них.
Технічні засоби, призначені для цілеспрямованої дії на об'єкт керування, називаються керуючими системами. Так, на- приклад, водій та автомобіль сумісно утворюють систему керу- вання, в якій об'єктом керування є автомобіль, а керуючою сис- темою – водій. Процес керування складається при цьому з виро- блення водієм керуючих дій (команд) на органи керування ав- томобіля – кермо, коробку передач, газ, гальма, прилади освіт- лення, опалення і т.д.
Входи і виходи керуючої системи та об'єкта керування призначені для організації прямих і зворотних зв'язків у системі керування, узагальнена структура якої наведена на рис. 6.1.
Прямий зв'язок
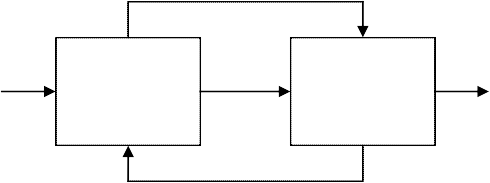 Вхід
Вхід
Керуюча система
Закон керування
Об’єкт керування
Вихід
Зворотний зв'язок
Рисунок 6.1 – Узагальнена структура системи керування
 Зв'язок від керуючої системи до об'єкта керування нази- вається прямим, а від об'єкта керування до керуючої системи – зворотним. За допомогою прямого зв'язку здійснюється процес керування об'єктом – змінення його станів у бажаному напрям- ку, а за допомогою зворотного зв'язку передається інформація про реальний стан об'єкта керування – керуючої системи. По- рівняння цього стану з бажаним визначає величину розхо- дження і, отже, визначає подальші дії керуючої системи щодо змінення станів об'єкта керування.
Зв'язок від керуючої системи до об'єкта керування нази- вається прямим, а від об'єкта керування до керуючої системи – зворотним. За допомогою прямого зв'язку здійснюється процес керування об'єктом – змінення його станів у бажаному напрям- ку, а за допомогою зворотного зв'язку передається інформація про реальний стан об'єкта керування – керуючої системи. По- рівняння цього стану з бажаним визначає величину розхо- дження і, отже, визначає подальші дії керуючої системи щодо змінення станів об'єкта керування.
Звичайно процес керування здійснюється таким чином: від об'єкта керування до керуючої системи передається інфор- мація про значення параметрів об'єкта керування (закон керу- вання). Керуюча система порівнює їх з потрібними значеннями параметрів, що зберігаються у її пам'яті, і визначає величину їх розходження. Потім вибирається засіб усунення цього розхо- дження, який потім реалізується керуючою системою.
Так, водій, дивлячись на приладний щит автомобіля, ви- значає реальну його швидкість і порівнює її з потрібною. Потім, враховуючи стан шляху, погодні умови та інші фактори ризику, розганяє свій автомобіль до потрібної швидкості. Системи керу- вання в реальних обставинах працюють в умовах зовнішніх і внутрішніх збурень.
Під зовнішніми збуреннями, або завадами, розуміють збу- рення, що надходять із зовнішнього середовища, а під внутріш- німи – завади або підмови, що виникають у самій системі керу- вання. Тому важливою проблемою, яка вирішується при проек- туванні системи керування, є підвищення її безпеки, надійності, завадостійкості та живучості.
Сукупність властивостей системи керування, яка дозволяє уникнути аварії, називається її безпекою.
Властивість системи керування виконувати свої функції протягом заданого відрізка часу, називається її надійністю.
Властивість системи керування виконувати свої функції в умовах завад називається завадостійкістю.
Можливість виконання системою керування своїх основ- них функцій при відмові частини обладнання називається живу-
чістю. Сучасні системи керування так чи інакше вирішують ці завдання, однак вимоги до них безперервно зростають, і тому боротьба із зовнішніми і внутрішніми збуреннями в системах керування є на сьогодні актуальним завданням.
6.4 Класифікація систем керування
Для правильного та ефективного використання систем ке- рування на практиці потрібна їх класифікація, в рамках якої мо- жна дослідити особливості тих чи інших їх структур. В основу класифікації систем керування покладені різні ознаки, напри- клад, види сигналів, принципи і типи керування. Розглянемо більш поширені класифікаційні ознаки і відповідні класи систем керування.
В першу чергу системи керування поділяються за ознакою типу об'єкта керування, яким вони керують.
Основні об'єкти керування можна поділити на біологічні, технічні та соціально - економічні. Відповідно і системи керу- вання поділяються за цими ознаками.
До першого класу відносять усі живі істоти та їх органи, наприклад, клітини, віруси, бактерії, тварини, люди.
До другого класу відносять наукові, технологічні процеси і виробництва, а також різні пристрої та обладнання.
Третій клас складають соціально-економічні утворення –
установи, армія, держава і т.д.
Для кожного класу наведених об'єктів керування повинні розроблюватись свої системи керування, які відповідно поді- ляють на біологічні, технічні та соціально-економічні.
За формою сигналів, що використовуються системами керування, вони поділяються на аналогові та цифрові.
У недавньому минулому найбільш поширеними були ана- логові системи керування. Їх особливістю є використання анало- гових величин як носіїв інформації: напруги, струму, частоти, фази і т.д. Перевагою аналогових систем керування є непереве- ршена швидкодія і відносно недорога і компактна їх реалізація. Однак точність і надійність роботи цих систем були недостатні-
ми для все більш нових їх застосувань, тому були розроблені цифрові системи керування, основу роботи яких складали циф- рова обробка сигналів і відповідно цифрове подання сигналів. Їх головна перевага – це висока точність роботи. Поряд з цим зна- чно зросли їх надійність, завадостійкість і живучість. Швидкодія цифрових систем керування хоча й менша від швидкодії анало- гових, але для більшості практичних випадків виявляється дос- татньою. В результаті цифрові системи сьогодні зайняли моно- польне положення в усіх сферах використання систем керуван- ня.
Однак обійтись без аналогових елементів цифрові системи та пристрої в принципі не можуть, тому правильно було б гово- рити не про цифрові системи керування, а про цифрові з елемен- тами аналогових.
За видом зв'язку системи керування поділяються на систе- ми з прямим і зворотним зв'язком. У першому випадку інфор- мація передається тільки від керуючої системи до об'єкта керу- вання, а в другому існує також передавання інформації в проти- лежному напрямі від об'єкта керування до керуючої системи. Системи керування з прямим зв'язком називаються ще система- ми з розімкненим зв'язком, а із зворотним – із замкненим. Сис- теми керування з прямим або розімкненим зв'язком використо- вуються у відносно простих випадках, коли вплив збурюючих факторів незначний або їх можна передбачити, а закон керуван- ня заздалегідь відомий.
У більш складних, найбільш поширених випадках, вико- ристовуються системи керування із зворотним зв'язком, тому що вони не потребують повної інформації про збурюючі дії та усі характеристики об'єкта керування.
Однак наявність зворотного зв'язку може призвести до зниження, а то і до втрати стійкості системи керування. В ре- зультаті погіршиться якість керування або система взагалі мо- же припинити свою роботу.
Наступна ознака для класифікації систем керування – це рівень автоматизації об'єкта керування.
 Використання автоматичних пристроїв і систем для вико- нання функцій керування називається автоматизацією.
Використання автоматичних пристроїв і систем для вико- нання функцій керування називається автоматизацією.
Ефект автоматизації виявляється насамперед у підвищенні продуктивності праці та якості продукції, а також у заміні лю- дини автоматами у небезпечних і важкодоступних місцях, та- ких, як шкідливі хімічні виробництва, ядерні двигуни і реакто- ри, космічні апарати і т.д.
При автоматизації основні процеси одержання енергії, ма- теріалів або інформації здійснюються автоматично, тобто за програмою без втручання людини.
Розрізняють такі три види автоматизації:
1 Часткова, коли автоматизуються не пов'язані один з од- ним механізми та устаткування.
2 Комплексна, коли автоматизуються як основні, так і до- поміжні операції.
3 Повна – у випадку автоматизації усіх агрегатів та устат- кувань, що беруть участь у робочому процесі.
У відповідності до видів автоматизації системи керування поділяються на системи з частковою, комплексною і повною автоматизацією.
Системи з частковою і комплексною автоматизацією ма- ють назву автоматизованих. В них як учасник процесу керу- вання обов'язково присутня людина.
Людино-машинні системи, засновані на використанні еко- номіко-математичних методів і технічних засобів для розв'язу- вання різних задач у виробництві, науці, техніці, освіті, військо- вій справі, проектуванні, плануванні, називаються автоматизо- ваними системами керування.
Передумовою створення автоматизованих систем керу- вання є можливість автоматизації інформаційних процесів на основі цифрових ЕОМ. Основними функціями автоматизованих систем керування є збирання, передавання, зберігання і оброб- лення первинних даних, формування документів для управлін- ського персоналу, видавання довідкової інформації, вироблення рекомендацій щодо керування.
Автоматизовані системи керування в залежності від об'єк- та керування поділяються на ряд підкласів. З них найбільш ві- домі автоматизовані системи керування підприємством (АСКП) і автоматизовані системи керування технологічним процесом (АСКТП).
АСКП є системами керування виробничо-господарчою ді- яльністю підприємства, що базується на комплексному викорис- танні економіко-математичних методів та сучасних засобів об- роблення інформації. Необхідність створення і втілення АСКП пов'язана з великою кількістю об'єктів керування, масштабністю виробництва і високою їх взаємозалежністю. Метою розроблен- ня АСКП є поліпшення системи керування підприємством і, як наслідок, одержання більш високої якості продукції, що випус- кається, з меншими витратами.
АСКТП призначені для розв'язування задач керування те- хнологічним процесом з обов'язковою участю людини- оператора.
Ці системи використовують у тому випадку, коли за будь- якими причинами неможливо автоматизувати усі задачі керу- вання, і тоді для їх розв'язування звертаються до людини. Вона звичайно приймає остаточне рішення, а завчасне оброблення інформації та її збирання здійснюють, як правило, цифрові при- строї та машини.
В АСКТП більшість контурів регулювання будують за іє- рархічним принципом.
Перший нижній рівень ієрархії — це основні регулятори, які стабілізують технологічні параметри або змінюють їх відпо- відно до керуючих сигналів. Основні регулятори, як правило, безпосередньо впливають на виконавчі органи.
Другий рівень утворюють коректуючі регулятори, які ке- рують основними регуляторами, тим самим непрямо впливаючи на технологічний процес.
На більш високих рівнях регулювання в АСКТП знахо- дяться обчислювальні комплекси, які прораховують оптимальні режими і змінюють завдання регуляторам, що знаходяться на нижніх рівнях ієрархії.
У випадку повної або майже повної автоматизації викори- стовуються системи автоматичного керування (САК).
Комплекс пристроїв, призначених для автоматичної підт- римки бажаного режиму роботи об'єкта керування, називається системою авт оматичного керування.
Date: 2016-02-19; view: 318; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |