Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Система ЧПУ
Система ЧПУ — фазово-імпульсна з убудованим лінійно-круговим інтерполятором УМЗ-2Ф. Програмоносій — перфострічка; швидкість зчитування інформації 600 рядків/с.
У верстаті по програмі передбачене переміщення столу, салазок і повзуна шпиндельної бабки, вибір величини робочих подач і прискорених переміщень і т.д.
3.4 Основні вузли і рухи у верстаті
По горизонтальних напрямних станини А [рисунок 13] переміщаються салазки хрестового столу Б (координата Y/), а по напрямним салазок у подовжньому напрямку стіл (координата X'). По вертикальних напрямних станини може переміщатися шпиндельна бабка Г с головним приводом (установочне переміщення), а по напрямних шпиндельної бабки рухається повзун У зі шпинделем VI верстата (подача по осі Z ). Шпиндель верстата одержує головний рух.
3.5 Кінематика верстата
Головний рух. Ступінчаста коробка швидкостей приводиться в обертання від асинхронного двигуна М1 (N = 5,5 кВт, п = 1450хв-1). Керування коробкою швидкостей здійснюється від селективного однорукояточного механізму. Для зменшення шуму вали коробки змонтовані на підшипниках кочення підвищеної точності. Пересувні блоки зубчастих коліс Б1, Б2, БЗ, Б4, Б5 забезпечують 17 практичних значень частот обертання шпинделя в межах 63— 2500 хв-1.
У верстаті застосований швидкозмінний патрон, що дозволяє закріплювати інструмент без шомпола, знизу.
Приводи подач. Для приводів подач по осях Х', Y, Zзастосований тиристорний електропривод, що стежить, з використанням малоінерційних електродвигунів із гладким якорем типу ПГТ-2. Електропривод, що стежить, являє собою двоконтурну систему автоматичного регулювання з жорсткими зворотними зв'язками по швидкості і шляху. Для контролю швидкості використовують тахогенератори, для контролю пройденої відстані — обертові трансформатори ВТ, що з'єднані з ходовими гвинтами через беззазорні редуктори.
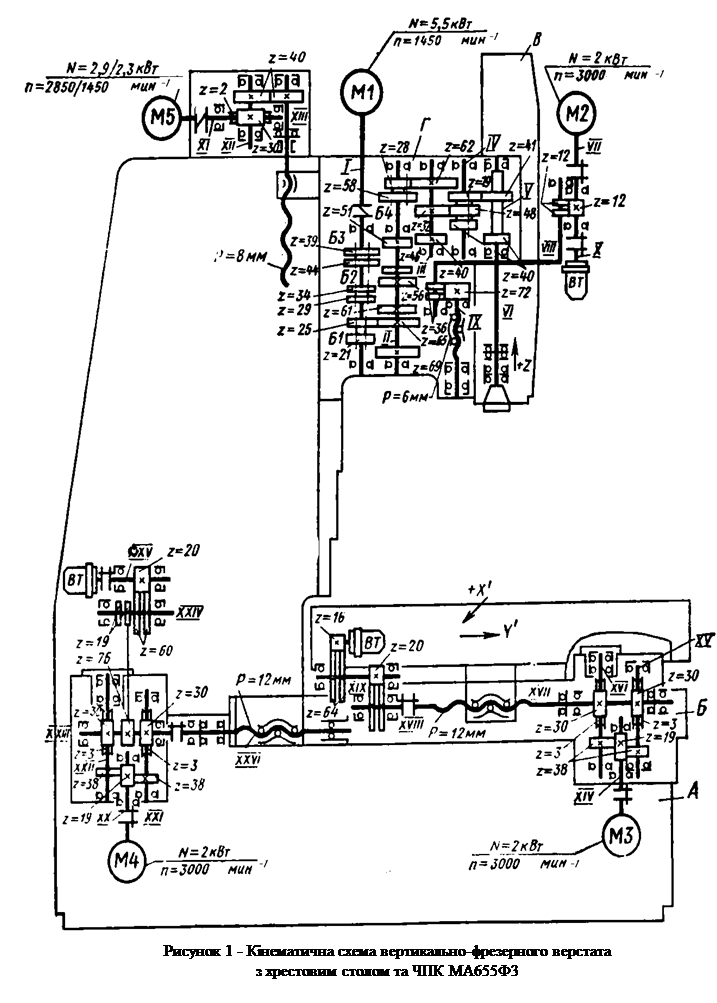
Привод повзуна по осі Z здійснюється від двигуна М2 (N =2 кВт, п = 3000 хв-1) через беззазорні передачі z = 12—12, 36—72 і передачу гвинт-гайка кочення IX із кроком Р = 6 мм. Зворотний зв'язок здійснюється за допомогою обертового трансформатора на валу X, з'єднаного з ходовим гвинтом через беззазорний редуктор.
Привод столу і салазок по осях X/ і Y/ здійснюється від малоінерційних двигунів постійного струму з гладким якорем МЗ і М4 (N = 2 кВт, п= 3000 хв-1). Привод салазок розміщений у станині, а привод столу — у лівій частині салазок. Салазки верстата являють собою масивний чавунний виливок, що має в нижній частині напрямні для поперечного переміщення, а у верхній частині подовжні напрямні кочення. Для створення попереднього натягу в напрямних служать натискні ролики. Для одержання поперечного переміщення рух передається гвинту-гайці кочення XVII від двигуна МЗ через зубчасту пару z = 19—38 і черв'ячний редуктор z = 3—30. Для усунення зазору в зубчастих зачепленнях редуктор має дві паралельні кінематичні гілки. Усунення зазору здійснюється зсувом одного з черв'яків в осьовому напрямку.
З зубчастим колесом z = 60 на валу XVII зв'язаний беззазорний редуктор. Зазор у зубчастих передачах z = 16—64 і 20—60 усувають пружинами. Необхідно, щоб 1 мм переміщення салазок відповідав одному оберту обертового трансформатора. Цю залежність можна виразити рівнянням
Таким чином, при контролі кутового переміщення ходового гвинта одному командному імпульсу (0,01 мм) відповідає поворот ротора обертового трансформатора на 3,6°.
Аналогічно улаштований і редуктор подовжнього переміщення. Ходовий гвинт XXVI подовжнього переміщення одержує обертання від двигуна М4 через зубчасту пару z == 19—38 і черв'ячний редуктор z = 3—30. Для захисту напрямних і ходових гвинтів від стружки й емульсії передбачені телескопічні щитки. Установка столу і салазок у вихідне положення відбувається за допомогою оптичних і відлікових мікроскопів.
Привод установочного переміщення шпиндельної бабки здійснюється від асинхронного електродвигуна М5 через черв'ячну пару z = 2—30, зубчасту передачу z = 40—40 і ходовий гвинт із кроком Р = 8 мм. Затиск шпиндельної бабки виконується гідроциліндром; дія затискного пристрою зблокована з пуском привода переміщення шпиндельної бабки.
Date: 2015-12-11; view: 274; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |