Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Живые» машины наступают
«Робот» – так назвал чешский писатель Карел Чапек в 1920 году придуманное им человекоподобное существо, персонаж пьесы «RUR» («Рос-сумские универсальные роботы»). Один из героев пьесы, генеральный директор компании «РУР», отвечая на вопрос, что такое роботы, говорит: «Роботы – это не люди… они механически совершеннее нас, они обладают невероятно сильным интеллектом, но у них нет души». Так впервые появилось новое понятие «робот», которое вскоре из фантастической литературы перешло в науку и технику. В пьесе «РУР» роботы, первоначально созданные для замены людей на заводах, вскоре вышли из – под контроля людей и принялись уничтожать своих создателей. Так К. Чапек иллюстрирует мысль о том, что техника может приносить человечеству пользу, только находясь в честных, добрых руках.
Дискуссии вокруг робота и его искусственного интеллекта, показывают, что люди понимают опасность, которую таят в себе роботы, служащие силам зла. Передовые учёные и инженеры учитывают это в своей работе.
Идея создания механических человекоподобных существ имеет весьма почтенный возраст. В одном из древнегреческих мифов говорится о страже царя острова Крит Миноса – медном великане Талосе, созданном по образу и подобию человека. Известен античный миф о Пигмалионе, изваявшем статую и оживившем её. Вспомните средневековые мечты о гомункулу сё – искусственном человеке, сказания о глиняном великане Големе..
В начале прошлого века писательница Мэри Шелли написала роман «Франкенштейн». В романе Виктор Франкенштейн, гениальный учёный, создал из неживой материи живое существо, подобное человеку Чудовище, поначалу желавшее людям добра, вышло из повиновения, и жестокий бесчеловечный мир сделал его преступником.
Фантастические образы и идеи К. Чапека во многом предвосхитили создание универсального автомата, снабжённого механической рукой, который получил броское название «промышленный робот».
В Советском Союзе робототехника зародилась в 50-х годах нынешнего столетия. В ту пору в нашей стране началась разработка промышленных роботов или, как их часто называют, автоматических манипуляторов. Роботов конструируют и в научных организациях, и в школьных технических кружках. Первый советский робот «В2М» (рис. 1) был создан в 1936 году автором этой книги. В 1937 году этот робот стал экспонатом Всемирной выставки в Париже.
Конечно, это было только начало. За последующие десятилетия советские роботостроители создали немало интересных моделей, получивших высокую оценку. Упомянем о некоторых конструкциях.

Рис. 1 Первый советский робот. Рис. 2 Робот – гигант выполненный на «В2М» СЮТ г Щегково Московской области
На станции юных техников (СЮТ) г. Щёлково Московской области в 1969 году ребята создали кибернетический робот-гигант (рис. 2), успешно экспонировавшийся на Всемирной выставке «ЭКСПО – 70» в Японии.
Робот – секретарь, разработанный в Калуге, по заданной программе включает и выключает освещение, поддерживает постоянную температуру в квартире. В указанное время он включает приёмник или телевизор. Утром будит хозяина, включая магнитофон с записью текста утренней гимнастики. Когда хозяина нет дома, робот отвечает на телефонные звонки, а если надо – записывает сообщение на магнитофонную ленту.
О конструкции этих роботов и многих других любительских моделей пойдёт речь впереди.
«МЕХАНИЧЕСКИЕ РУКИ»
История механических рук начинается с… атомной физики. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Можно сказать, что в этих копирующих манипуляторах была использована та же идея, что и в известных всем куклах – марионетках (рис. 3). Оператор, работающий на манипуляторе, рукой приводит в движение управляющий механизм, звенья которого соединены с соответствующими звеньями исполнительного механизма, повторяющего все движения руки оператора.
При работе с радиоактивными веществами расстоянии от оператора до исполнительных рук манипулятора может доходить до десятков метров, при работах в подводном мире – до тысяч метров. При применении манипуляторов в космическом пространстве это расстояние будет измеряться сотнями тысяч, миллионами километров… Надёжное и точное управление на значительном расстоянии – вот первое требование, которое предъявляют к любой конструкции копирующего манипулятора. Первое, но не единственное.

Рис. 3. Кукла – марионетка
РОБОТ ТИПА «РУКА»
Каждый робот рассчитан на выполнение той или иной работы, которая и определяет его конструкцию, размеры, степень подвижности, число рук и пальцев на руке, грузоподъёмность, точность движения и т.д. Независимо от того, стоит ли робот возле станков, передвигается между ними или ползает под потолком, у него всегда есть мощная механическая рука с двумя или четырьмя пальцами. Роботы отличаются один от другого общим видом, габаритами и техническими характеристиками, но у них есть и общие признаки. На рис. 4 изображена структурная схема такого робота. Рукой управляет либо оператор с пульта, либо мозг робота – его ЦВМ (цифровая вычислительная машина). В блоке памяти находится программа действий робота, которую вводят в него или которую он приобретает во время обучения.
Общий блок управления электрическими, гидравлическими или пневматическими двигателями, расположенными в плече руки, предплечье, в кисти, состоит из цепей управления движением руки по каждой из координатных осей. Сколько степеней свободы у руки, столько и цепей управления.
Робот – манипулятор, встав на рабочее место, согласовывает свою работу с обслуживаемым технологическим оборудованием. Движения руки точные, повороты строго рассчитаны во времени. Робот с оборудованием образует автоматизированную ячейку. Из таких ячеек составляют робототехнологические комплексы или линии. Одно из наиболее распространённых занятий роботов – манипуляторов – окраска изделий.
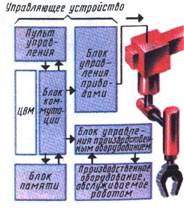
Рис. 4. Структурная схема робота.
Окрашивают обычно способом набрызгивания. Чтобы защититься от вредного действия распыляемой краски, приходится работать в специальной маске, а рабочую зону оборудовать специальными защитными устройствами. Это сложно, дорого и все равно небезвредно для человека. Если же окраску изделий поручить манипулятору, а управление им человеку, это оздоровит условия работы и повысит производительность труда.
Процессы формовки кирпича обычно высокомеханизированы. За формовкой следуют операции пропаривания, обжига, требующие перекладывания кирпича и складывания его в пирамиды определённой конфигурации. Эти операции также можно механизировать и автоматизировать, используя манипуляторы. Механическая рука может брать одновременно 5-6 и более кирпичей, каждый из которых весит до 4 кг, и не боится обжечься, даже если они только что из печи.
Стеклянные заготовки для телевизионного кинескопа могут весить 10-15 кг. Сложный технологический процесс их изготовления требует многократной установки, съёма, погрузки. Сотни людей были заняты этой малопроизводительной работой, но им на смену пришли механические руки.
Эти несколько скупых примеров ясно свидетельствуют о том, как широко поле деятельности, открывающееся перед автоматическими манипуляторами в самых различных областях производства.
Date: 2015-07-27; view: 559; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |