Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Определение степени подвижности пространственного и плоского механизма
Основные виды механизмов:
- плоские механизмы – все звенья располагаются в одной плоскости или в параллельных плоскостях;
- пространственные механизмы – звенья лежат в разных плоскостях.
пространственный механизм
- механизмы с гибкими связями (ременные и цепные передачи);

ременная передача цепная передача
-
- механизмы с высшими и низшимикинематическими парами
кулачковые, зубчатые, шарнирно-рычажные
фрикционные, храповые, механизмы
мальтийские механизмы
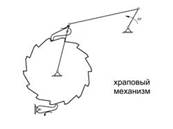
храповый механизм шестизвенный шарнирный механизм
зубчатая передача кривошипно-ползунный механизм
- гидравлические и пневматические механизмы.
Для пространственного механизма степень подвижности определяется по формуле Сомова – Малышева:
 , (1)
, (1)
где n – число звеньев (подвижных и неподвижных) пространственного механизма;
 - число кинематических пар 5-го, 4-го, …, 1-го класса.
- число кинематических пар 5-го, 4-го, …, 1-го класса.
Степень подвижности плоского механизма определяется по формуле Чебышева:
 , (2)
, (2)
где n – число подвижных звеньев; 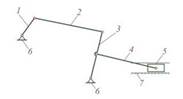
 - число кинематических пар 5-го класса;
- число кинематических пар 5-го класса;
 - число кинематических пар 4-го класса.
- число кинематических пар 4-го класса.
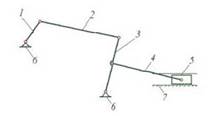
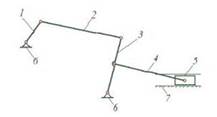
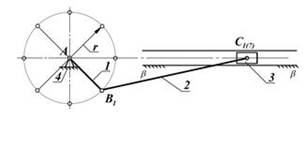
1 – кривошип, 2, 4 – шатуны, 3 – коромысло, 5 – ползун, 6 – стойка, 7 - направляющая.
Рисунок 1.8 – Шестизвенный механизм
- число подвижных звеньев равно 5;
- число кинематических пар 5-го класса = 7 (стойка 6 – кривошип 1; кривошип 1 – шатун 2; шатун 2 – коромысло 3; коромысло 3 – стойка 6; коромысло 3 – шатун 4; шатун 4
– ползун 5; ползун 5 – направляющая 7);
- число кинематических пар 4-го класса = 0.
Рассчитываем степень подвижности шестизвенного механизма:  . Степень подвижности механизма равна числу ведущих звеньев или числу двигателей.
. Степень подвижности механизма равна числу ведущих звеньев или числу двигателей.
План положений механизма. План скоростей и ускорений механизма. Теорема подобия планов скоростей и ускорений.
План положений механизма.
Изображение кинематической схемы механизма, соответствующее определённому положению начального звена, называется планом механизма. Планы строятся в заданном масштабе. При этом различают понятия "масштаб" и "масштабный коэффициент".
Масштабом физической величины называют длину отрезка в миллиметрах, изображающую единицу измерения этой величины.
Масштабным коэффициентом физической величины называют отношение численного значения физической величины к длине отрезка в миллиметрах, изображающего эту величину.
Масштаб и масштабный коэффициент являются взаимно обратными величинами. Масштабные коэффициенты обозначают буквой с индексом, указывающим, к какой величине они относятся.
Например, масштабный коэффициент длин для плана механизма есть отношение какой-либо длины в метрах к отрезку АВ, изображающему эту длину на чертеже в миллиметрах:
Или
План положений механизма – это масштабное графическое изображение кинематической схемы механизма для заданного положения ведущего звена.
План положений механизма вычерчивается в определенном масштабе
 ,
,
где  - фактическая длина шатуна;
- фактическая длина шатуна;
 - длина отрезка, изображающего шатун на чертеже.
- длина отрезка, изображающего шатун на чертеже.
Date: 2015-07-24; view: 4635; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |