Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Принципиальная схема установки и принцип работы. Ротор I, подлежащий балансировке устанавливается на опорные места 2 маятниковой рамы 3, которая шарниром 0 связана с неподвижным основанием
Ротор I, подлежащий балансировке устанавливается на опорные места 2 маятниковой рамы 3, которая шарниром 0 связана с неподвижным основанием. Рама поддерживается пружиной 5. На оси ротора с каждой его стороны установлены два статически отбалансированных диска 4 и 6 с прорезями для установки грузов. Диски имеют возможность поворачиваться вокруг оси вращения ротора, при этом угол поворота определяется по лимбу диска.
Разгон ротора осуществляется электродвигателем 9 через фрикционную передачу 8. Если ротор не отбалансирован, маятниковая рама будет совершать вращательные колебания, относительно шарнира 0. Амплитуда колебаний измеряется индикатором 7.
Задача балансировки - сделать эта колебания возможно меньшими.
При вращении ротора с постоянной угловой скоростью на каждую элементарную массу dm действует центробежная сила
инерции dPu= rω 2dm.
Если распределение масс равномерное, то каждой элементарной массе dm соответствует масса dm1, расположенная в той же плоскости, но по другую сторону от оси вращения 0 (рис. 4.3). Поэтому геометрическая сумма всех центробежных сил инерции равна 0.
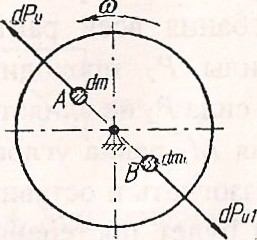
Рнс.4.3. Ротор с равномерным распределением масс
В случае неравномерного распределения масс dPu≠dPu1. Так как любая пространственная система векторов может быть сведена к эквивалентной системе двух сил, лежащих в произвольно выбранных плоскостях, то все элементарные силы инерции приводят к двум суммарным скрещивающим силам P1 и Р2, плоскости действия которых можно принять перпендикулярными оси вращения (например, плоскости 4 и 6) (рис. 4.2.).
 (4.1)
(4.1)
где mi, - приведенная к данной плоскости неуравновешенная масса;
ri -расстояние от центра массы до оси вращения ротора;
miri - статический дисбаланс массы.
Чтобы уравновесить силы P1 и Р2, необходимо в плоскостях 4 и 6 установить такие грузы (противовесы), силы инерции Pyi которых были бы равны соответственно Р1 и Р2 и направлены противоположно силам, т.е.

 (4.3)
(4.3)
где myi -масса противовеса, установленного в плоскости 4 и 6.
Вертикальная составляющая Picosωt силы Р1 создаст относительно оси 0 (рис.4.2) переменный момент Mi, Этот момент вызывает колебания всей рамы с ротором. Так как плоскость действия силы Р2 проходит через ось поворота системы рама-ротор, то сила Р2 не влияет на колебания системы.
Частота воздействия M1 равна угловой скорости вращения ротора ω. Если ротор разогнать и оставить свободно вращаться, то угловая скорость ω будет постепенно уменьшаться. Когда величина ω будет равна собственной частоте колеблющейся системы рама-ротор, наступит резонанс. Из теории колебаний известно, что амплитуда А вынужденных колебаний при резонансе пропорциональна амплитуде возмущающей силы, т.е. дисбалансу ротора в плоскости 4
тr = µА, (4.4)
где µ - коэффициент пропорциональности, зависящий от постоянных параметров данной установки.
Если определить постоянную µ данного станка, то по амплитуде колебаний А1, зафиксированной на индикаторе, можно определить величину дисбаланса.
Для определения коэффициента пропорциональности и направлений, в которых необходимо установить противовесы, воспользуемся методом корректирующих масс.
Замерим амплитуду колебаний ротора А1 от собственного дисбаланса ротора. Затем плоскость (4) (не проходящую через ось шарнира 0) устанавливаем по лимбу в нулевое положение и в одну из прорезей диска ставим произвольно взятую корректирующую массу тд на расстоянии rд от оси вращения.
Дополнительный тдrд и исходный m1r1 дисбалансы дают в сумме дисбаланс (тr)∑1 (рис.4.4 а).
тдrд + m1r1=(тr)∑1 (4.5)
Если величине Аi придать направление соответствующего вектора miri, то можно записать:
Ad + A1 =A∑1 = A2, (4.6)
где A∑1 = А2 - амплитуда колебаний рамы при резонансе после установки добавочного груза;
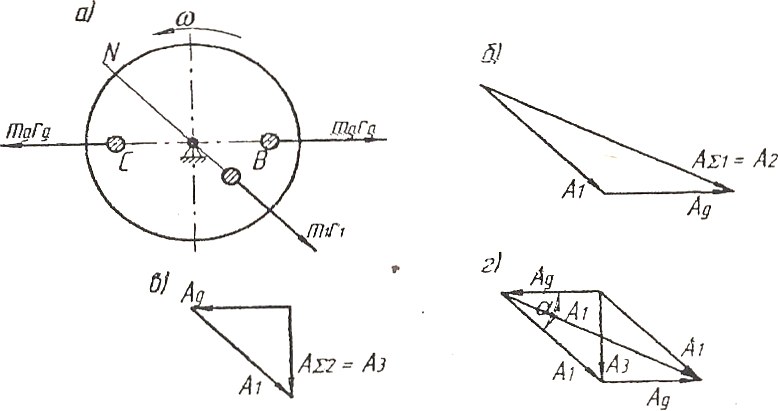
Рис. 4.4. Метод корректирующих масс
Ад - амплитуда колебаний, которая бы имела место при наличии лишь дисбаланса тдrд. В соответствии с уравнением (4.6) можно построить векторный треугольник (рис. 4.4 б).
Поворачиваем плоскость (4) вместе с корректирующей массой на 180° и делаем третий замер амплитуды, она будет равна A∑1 = А3. Соответствующий векторный треугольник изображен на рис. 4.4 в.
Совмещая векторные треугольники (рис.4.4 г) получим параллелограмм, для которого известны стороны A1 и диагонали А2 и A3. По этим данным строим параллелограмм и находим величину Ад, что дает возможность определить коэффициент пропорциональности µ:
µ = тдrд/Ад (4,7)
Величина дисбаланса в плоскости 4 определяется по формуле (4.4). Выбрав массу m1,получаем расстояние от оси вращения до центра массы m1 (радиус rj)
r1 = µA1/m1 (4.8)
Положение вектора определяется углом а, который можно определить из полученного параллелограмма.
Кроме графоаналитического решения возможно и аналитическое решение этой задачи. Амплитуда от дисбаланса, создаваемого корректирующей массой, может быть вычислена из теоремы, устанавливающей связь между сторонами и диагоналями параллелограмма.
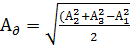 (4.9)
(4.9)
Величину cosα можно определить из треугольника амплитуд по теореме косинусов:
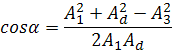 (4.10)
(4.10)
Поскольку cosα. соответствуют углы ±α и 180° ±α, то необходимо проверить все положения плоскости. Правильным является то положение плоскости, при котором вибрация отсутствует или имеет минимальную величину.
Чтобы определить все параметры противовеса во второй плоскости, ротор необходимо повернуть на 180°, чтобы плоскости 4 и 6 поменялись местами.
Date: 2015-07-24; view: 351; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |