Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Механические и скоростные характеристики двигателя постоянного тока независимого возбуждения. Естественные и искусственные характеристики
|
|
Механическая характеристика двигателя при неизменных параметрах U, R и Ф представляется прямой линией 1 (рис. 4.2).
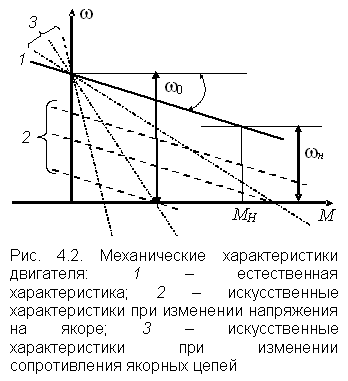 На холостом ходу (М = 0) двигатель вращается с частотой вращения w0. По мере увеличения момента нагрузки частота вращения снижается, номинальному моменту нагрузки МН соответствует номинальная частота вращения w0. Изменение величины питающего напряжения вызывает пропорциональное уменьшение частот вращения во всех режимах работы. При этом жесткость механической характеристики b сохраняется, так как его величина, согласно (4.5б), определяется сопротивлением якорной цепи, конструктивным коэффициентом и магнитным потоком машины.
На холостом ходу (М = 0) двигатель вращается с частотой вращения w0. По мере увеличения момента нагрузки частота вращения снижается, номинальному моменту нагрузки МН соответствует номинальная частота вращения w0. Изменение величины питающего напряжения вызывает пропорциональное уменьшение частот вращения во всех режимах работы. При этом жесткость механической характеристики b сохраняется, так как его величина, согласно (4.5б), определяется сопротивлением якорной цепи, конструктивным коэффициентом и магнитным потоком машины.
Согласно (4.5), путем изменения величины питающего напряжения U от нуля до номинального значения (например, при помощи управляемого тиристорного выпрямителя), можно изменять частоту вращения вала в широких пределах, что подтверждается рис. 4.2 (характеристиками 2). При этом диапазон плавного и экономичного регулирования частоты вращения – глубина регулирования – находится по формуле D= wmax/ wmin
где wmax, wmin – максимально и минимально возможные частоты вращения при данном способе регулирования.
Практически значение глубины регулирования достигает 10…100 тыс. Столь большой диапазон регулирования позволяет исключить или значительно упростить механическую трансмиссию.
Вторым способом регулирования частоты вращения двигателя является изменение сопротивления якорных цепей – путём включения последовательно в цепь якоря регулировочного резистора RР1 (рис. 4.1). В этом случае, согласно (4.5), при увеличении сопротивления жесткость характеристики машины уменьшается (рис. 4.2, линии 3). Как видно из рис. 4.2, частота вращения машины при идеальном холостом ходе: М = 0 не изменяется, а с ростом момента нагрузки частота вращения снижается значительно (β уменьшается). Данный способ регулирования позволяет изменять частоту вращения в значительном диапазоне, однако вследствие значительных потерь мощности в регулировочном резисторе резко снижается кпд привода:
Скоростная характеристика двигателей с независимым и параллельным возбуждением – это зависимость n = f (Iя) при U = const и Iе = const, где
n - скорость
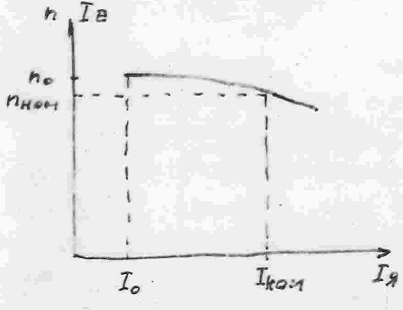
Iя - ток якоря
Iе - ток возбуждения.
Рис.8.5.4. Скоростная характеристика.
Изменение скорости вращения может происходить за счёт изменения нагрузки и магнитного потока. Увеличение тока нагрузки незначительно изменяет внутреннее падение напряжения из-за малого сопротивления цепи якоря и поэтому лишь незначительно уменьшает скорость вращения двигателя. Что же касается магнитного потока, то вследствие реакции якоря при увеличении тока нагрузки он несколько уменьшается, что приводит к незначительному увеличению скорости двигателя. Таким образом, скорость вращения двигателя с параллельным возбуждением изменяется очень мало. Скорость вращения двигателя определяется формулой:
n = (U – IяRя) / c∙Φ, где
c – коэффициент, зависящий от устройства машины.
Скорость вращения двигателя с независимым возбуждением можно регулировать либо изменением сопротивления в цепи якоря, либо изменением магнитного потока. Следует отметить, что чрезмерное уменьшение тока возбуждения и, особенно, случайный обрыв этой цепи очень опасны для двигателей с параллельным и независимым возбуждением, т.к. ток в якоре может возрасти до недопустимо больших значений. При небольшой нагрузке (или на холостом ходу) скорость может настолько возрасти, что станет опасной для целостности двигателя.
Date: 2015-07-24; view: 5450; Нарушение авторских прав