Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Указание мер безопасности
МАГНУС-21
Інструкція З ЕКСПЛУАТАЦІЇ
2100.00.000РЭ
Зміст
- Призначення 4
- Технічні характеристики 4
- Будова приводу 5
- Режими роботи 8
- Параметри налаштування 12
- Заходи безпеки 14
- Підготовка до роботи 15
- Нормальна робота приводу 15
- Характерні неполадки та засоби їх усунення 17
- Транспортування та зберігання 18
Ця Інструкція з експлуатації призначена для вивчення та правильної експлуатації приводу регульованого Магнус-21
- ПРИЗНАЧЕННЯ
Привід регульований Магнус-21 (у подальшому «привід») призначений для застосування у механізмах відкривання та закривання автоматичних телескопічних та центрального відкривання дверей ліфтів.
- ТЕХНІЧНІ ХАРАКТЕРИСТИКИ
2.1. Блок управління
Живильна мережа
Рід струму мережі змінний
Кількість фаз 1
Напруга, В 220
Частота мережі, Hz 50; 60
Струм, що споживається, не більше, А 4,0
Вихідна мережа з Блоку
Рід струму мережі змінний
Кількість фаз 3
Напруга, В 0…220
Частота мережі, Hz 0…50
Струм, що споживається, не більше, А 2,3
Ступінь захисту згідно ГОСТ 14254 IP 20
Напруга на входах «відкрити», «закрити», В сухий контакт/±24
Напруга на ключах «реверс», «двері відкриті»,
«двері закриті», не більше (пік), В 100
Струм через ключі «реверс», «двері відкриті»,
«двері закриті», не більше, А 0,15
Граничні робочі значення температури повітря, оС -5…+55
Габаритні розміри, не більше, мм 200х210х75
Маса, не більше, кг 0,06
2.2. Енкодер
Рід струму мережі постійний
Струм, А 0,01
Кількість каналів 2
Кількість зубців переривника, шт. 16; 60
Маса, не більше, кг 0,06
2.3. Електродвигун
Модель (рекомендована) АИР 63В4; АИР 71В8;
- БУДОВА ПРИВОДУ
3.1. Привід містить блок управління із вбудованим сервісним пристроєм, енкодер та асинхронний електродвигун.
Привід є складовою частиною балки дверей кабіни ліфту, яка, зазвичай, має зубчату пасову передачу з повідним та веденим шківами та зубчастим пасом, зв’язаним з каретками дверей. Зв’язок валу електродвигуна з повідним шківом може здійснюватися через редуктор.
Сумісність приводу в роботі з різними варіантами конструктивного виконання балок забезпечується налаштуванням параметрів, що наведені у подальшому у цій Інструкції у вигляді таблиць.
3.2. Блок управління (у подальшому Блок) призначений для керування електродвигуном згідно сигналів від станції ліфту та енкодеру, забезпечуючи безпечну та зручну роботу дверей кабіни.
Блок управління містить плату, розташовану у корпусі. Корпус має відсік із зйомною кришкою для підключення через роз'єми до плати кабелів, які йдуть від двигуна, енкодеру, станції ліфту та живлячої мережі. Зовнішній вигляд Блоку наведено на малюнку 1, схема зовнішніх підключень – на малюнку 2.
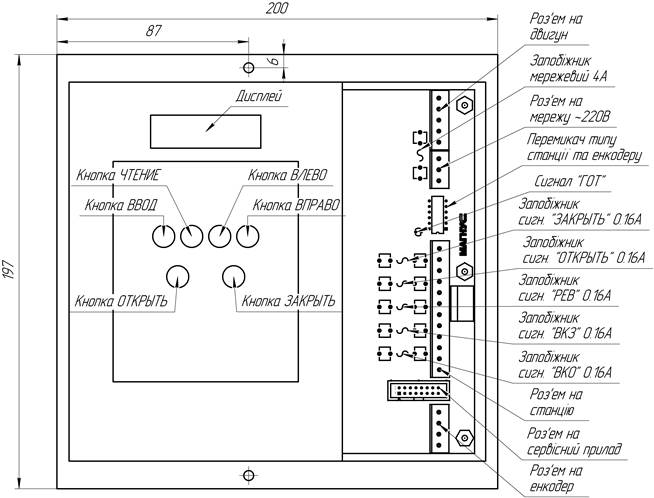
Мал. 1. Зовнішній вигляд Блоку
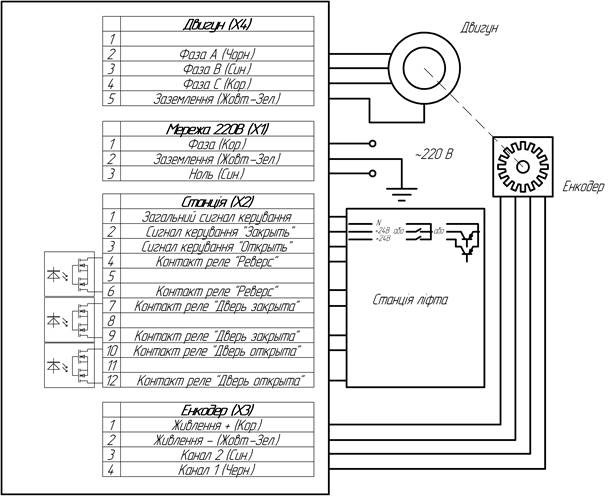
Мал. 2 Схема зовнішніх підключень
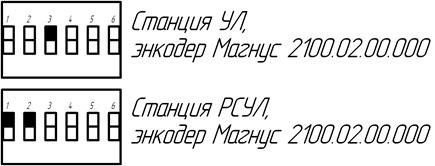
На платі встановлено мікроперемикачі для вибору типу сигналу від станції та рівня живлення енкодера. Схему станів мікроперемикачів наведено на малюнку 3.
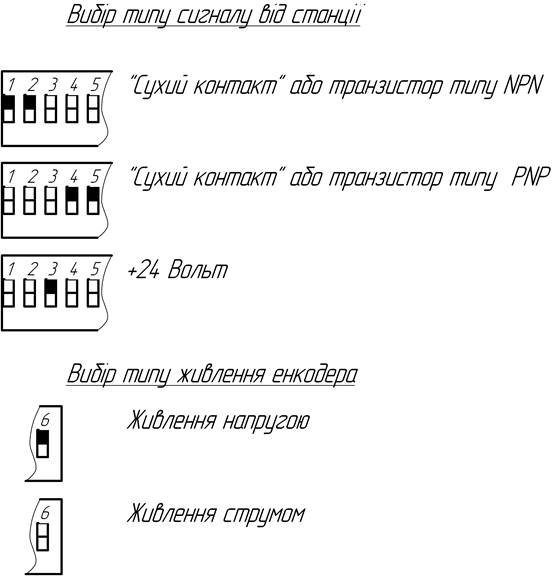
Мал. 4. Схема станів мікроперемикачів
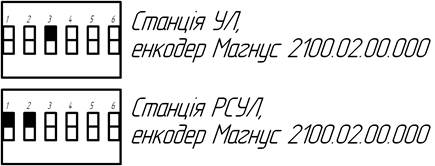
Приклад:
3.3. Сервісний пристрій (далі «пристрій») містить плату, закріплену всередині корпусу Блоку, а також дисплей і клавіатуру, що розташовані на лицевій панелі корпусу блока (мал.1)
3.4. Клавіатура пристрою має 6 кнопок:
- «Ввід/Читання»;
- «Відміна/Запис»;
- «<»;
- «>»;
- «Відкрити»;
- «Закрити».
3.4.1. Кнопка «Ввід/Читання» призначена для:
- входу в обраний режим роботи приладу;
- введення номера таблиці;
- введення номера параметра налагодження;
- введення значення параметра налагодження;
- запису таблиці із пам’яті {Lift} в пам'ять {ProGr}.
3.4.2. Кнопка «Відміна / Запис» призначена для:
- виходу на попередній рівень меню;
- запису таблиці із пам’яті {ProGr} в пам'ять {Lift}.
3.4.3. Кнопка «<» призначена для:
- вибору режиму роботи;
- зменшення номера параметра налагодження;
- зменшення значення параметра налагодження;
- зменшення номера таблиці.
3.4.4. Кнопка «>» призначена для:
- вибору режиму роботи;
- збільшення номеру параметра налагодження;
- збільшення значення параметра налагодження;
- збільшення номера таблиці.
3.4.5. Кнопки «Відкрити» та «Закрити» призначені для подання команд у режимі {StAte} у процесі налагодження приводу. Для переходу у керування зі вказаних кнопок необхідно натиснути кнопку «Ввід/Читання» до появи у лівої частини дисплею крапки. У цьому режимі Блок ігнорує сигнали станції. Перехід на керування від станції виконується кнопкою «Відміна/Запис» або автоматично у сплячому режимі Прибору.
- РЕЖИМИ РОБОТИ
Робота приладу здійснюється у наступних режимах:
- {StAte} – стан;
- {Lift} – ліфт;
- {ProGr} – програматор;
- {Encod} – енкодер;
- {diSt } – довжина ходу пасу;
- {Err } – помилка.
В режим {StAte} привід потрапляє автоматично при поданні живлення. При цьому здійснюється нормальна робота приводу і дисплей показує стан приводу:
- { ─ ─ Θ ─ ─ } – закрито;
- { ─ ─I─I─ ─ } – рух;
- {Θ ─ ─ ─ Θ} – відкрито;
- { ─ ] ─ [ ─ } – реверс;
- { ─ [ ─ ] ─ } – утримання;
- { ЕX } – помилка.
При натисненні кнопки «>» на дисплеї пристрою з’являється один з параметрів роботи приводу:
- Е- позиція в імпульсах енкодеру;
- L – позиція у мм;
- S – встановлена швидкість, мм/с;
- U – випрямлена напруга в Блоці, В;
- P – відносна напруга, що подається на двигун у відсотках від напруги мережі;
- t – час руху після подання команди ВД чи ЗД, с;
- F – задане зусилля, Н.
4.3. Режим {Lift} дозволяє виконувати програмування, перегляд та редагування значень параметрів налаштування в таблиці пам’яті {Lift}.
4.4. Порядок роботи в режимі {Lift}
4.4.1. Вибір режиму {Lift}.
Встановити режим {Lift} за допомогою кнопок «>» та «<». Натисніть кнопку «Ввід». На дисплеї з’явиться напис {PASS}, що пропонує ввести пароль. Натисніть кнопку «Ввід». На дисплеї з’явиться напис {0000}, при цьому крайня ліва цифра буде миготіти. Введіть її значення за допомогою кнопок «>» та «<» та натисніть кнопку «Ввід». Першу цифру паролю встановлено, почне миготіти друга цифра. Необхідно ввести всі чотири цифри паролю аналогічним способом. Пароль користувача за замовчуванням – {0285}. Після цього на дисплеї з’являться п’ять цифр. Двозначне число у лівій частині дисплею вказує на номер параметра налаштування. Тризначне число у правій частині дисплею показує значення цього параметра.
4.4.2. Вибір номера параметру налаштування.
Встановіть за допомогою кнопок «>» та «<» необхідний номер параметру налаштування (дві цифри ліворуч) та натисніть кнопку «Ввід». Три цифри праворуч перейдуть у режим миготіння.
4.4.3. Встановлення значення параметру налаштування.
Встановіть за допомогою кнопок «>» та «<» необхідне значення параметру налаштування (три цифри праворуч) та натисніть кнопку «Ввід». Для повернення до раніше встановленого значення параметру натисніть кнопку «Відміна».
4.4.4. Встановити необхідні значення усіх параметрів налаштування у таблиці, повторюючи дії за пп. 4.4.2. та 4.4.3.
4.4.5. Натисніть кнопку «Відміна/Запис». Привід перейде у режим {StAte} та є готовим до роботи.
4.5. Режим {ProGr} дозволяє виконувати функції:
- перегляд 8 заводських та 8 таблиць користувача параметрів налаштування у пам’яті {ProGr};
- запис 8 заводських та 8 таблиць користувача параметрів налаштування з пам’яті {ProGr} у пам’ять {Lift};
- читання таблиці параметрів налаштування з пам’яті {Lift} і запис в одну з 8 таблиць пам’яті користувача {ProGr}.
4.6. Порядок роботи у режимі {ProGr}.
4.6.1. Вибір режиму {ProGr}.
Встановити режим {ProGr} за допомогою кнопок «>» та «<». Натисніть кнопку «Ввід». У лівій частині дисплею з’явиться позначка останньої переглянутої таблиці параметрів:
- tX – заводська таблиця параметрів налаштування;
- FX – вільна таблиця параметрів налаштування користувача;
- bX – заповнена таблиця параметрів налаштування користувача.
Права частина дисплею при цьому не світиться.
4.6.2. Вибір типу та номеру таблиці параметрів.
За допомогою кнопок «>» та «<» тип та номер таблиці параметрів. Для запису обраної заводської заповненої таблиці параметрів чи аналогічної таблиці користувача з пам’яті {ProGr} у пам’ять {Lift} натисніть кнопку «Відміна/Запис» і утримуйте більше 1 секунди. Запис вільної таблиці параметрів налаштування користувача є неможливим.
Для запису параметрів налаштування з пам’яті {Lift } в обрану таблицю пам’яті користувача {ProGr} натисніть кнопку «Ввід/Читання» і утримуйте більше 1 секунди. Запис у заводські таблиці параметрів налаштування неможливий.
Для виходу зі стану «Номер таблиці» без запису або читання натисніть кнопку «Відміна/Запис» і утримуйте більше 1 секунди.
4.6.3. Перегляд таблиць параметрів налаштування.
Після вибору таблиці параметрів налаштування натисніть клавішу «Ввід». На дисплеї з’являться п’ять цифр. Двозначне число у лівій частині дисплею вказує номер параметру налаштування. Тризначне число у правій частині дисплею вказує значення даного параметру. За допомогою кнопок «>» та «<» здійснюється перегляд параметрів.
4.7. Режим {Encod } дозволяє здійснювати діагностику енкодеру.
Для діагностики енкодеру встановіть за допомогою кнопок «>» та «<» режим {Encod }. Натисніть кнопку «Ввід». На дисплеї з’явиться індикація {- - - - -}. Необхідно вручну перемістити двері кабіни на відстань не меншу 200 мм. Якщо енкодер працює нормально, на дисплеї з’явиться індикація {GOOD } і привід перейде у нормальну роботу. Якщо зберігається індикація {- - - - -} – енкодер є несправним.
4.8. Режим {diSt }дозволяє провести вимір та запис у таблицю параметрів пам’яті {Lift }довжину ходу пасу. Встановіть за допомогою кнопок «>» та «<» режим {diSt }. Натисніть кнопку «Ввід». Привід виконає автоматичний вимір довжини ходу пасу, на короткий час висвітить його значення, здійснить запис у таблиці параметрів пам’яті {Lift } параметру 01 та перейде до нормальної роботи.
Якщо після закінчення виміру на дисплеї з’явиться повідомлення про помилку Е5 – недоїзд чи Е8 – переїзд, необхідно провести повторний вимір.
4.9. При помилці у роботі приводу на дисплеї з’являється позначка помилки. Привід визначає наступні види помилок:
- Е0 – помилка зв’язку пристрою з Блоком. Помилку буде скинуто автоматично при відновленні сталого зв’язку Пристрою з Блоком;
- Е1 – перевантаження по струму, тобто струм вихідних ключів перевищив порогове значення, задане апаратно. Помилка знімається при виключенні та повторному включенні Блоку;
- Е2 – напруга живильної мережі поза допустимих меж, тобто напруга на вихідних ключах перевищує 410В абонижче 225В. При зниженні напруги до 350В або підвищенні до 240В Блок запускається автоматично;
- Е3 – перегрів радіатору Блоку управління. При зниженні температури до допускного значення Блок буде запущений автоматично;
- Е4 – перегорів один із запобіжників по входах ВД чи ЗД або виходам ВКО, ВКЗ, РЕВ. Необхідно усунути причину перегорання та замінити запобіжник. Причиною перегорання запобіжників зазвичай є помилкова подача високої напруги на входи;
- Е5 – ширина отвору, яка виміряна енкодером при виконанні команди ВД чи ЗД виявилася більшою допускного значення. Помилка скидається при зміні коду напрямку руху. При повторній появі цієї помилки необхідно провести вимір отвору та перевірити механіку приводу;
- Е6 – таймаут руху, перевищено максимальний час відкриття чи зачинення, які задано у таблиці параметрів. Помилка скидається при зміні коду напряму руху;
- Е7 – помилка напрямку, одночасно подано команди ВД та ЗД. Помилка скидається при поданні вірного коду напрямку;
- Е8 – ширина отвору, яка виміряна енкодером при виконанні команди ВД виявилася меншою допускного значення. Помилка скидається при зміні коду напрямку руху. При повторній появі цієї помилки необхідно провести вимір отвору та перевірити механіку приводу.
4.10. Перегляд помилок можна здійснити, зайшовши у режим {Err }. При натисканні кнопки «Ввід» у цьому пункті меню здійснюється перехід у меню другого рівня, яке складається з наступних пунктів:
- Err
↓
Cntr ↔ Hist ↔ Clr
Cntr – лічильник кількості помилок кожного типу окремо;
Hist – послідовність виникнення помилок;
Clr – скидання лічильника кількості помилок.
- ПАРАМЕТРИ НАЛАШТУВАННЯ
5.1. Параметри налаштування приводу для роботи з ліфтами різних модифікацій наведено у таблиці 1.
Таблиця 1
| № | Найменування параметру | Таблиця параметрів | ||||
| t1 | t2 | t3 | t4 | t8 | ||
| П00 | Напрямок обертання валу при відкриванні: - проти часової стрілки - за часовою стрілкою | |||||
| П01 | Довжина ходу пасу, мм | п5.8 | ||||
| П02 | Зупинна відстань відкривання, мм | |||||
| П03 | Відстань відкривання замку, мм | |||||
| П04 | Зусилля відкривання, крім прискорення, Н | |||||
| П05 | Зусилля закривання, крім прискорення, Н | |||||
| П06 | Швидкість відкривання маршова, мм/с | |||||
| П07 | Швидкість закривання маршова, мм/с | |||||
| П08 | Відстань прискорення відкривання, % | |||||
| П09 | Відстань прискорення закривання, % | |||||
| П10 | Відстань уповільнення відкривання, % | |||||
| П11 | Відстань уповільнення закривання, % | |||||
| П12 | Стартова швидкість відкривання, мм/с | |||||
| П13 | Кінцева швидкість відкривання, мм/с | |||||
| П14 | Стартова швидкість закривання, мм/с | |||||
| П15 | Кінцева швидкість закривання, мм/с | |||||
| П16 | Зусилля прискорення відкривання, Н | |||||
| П17 | Відстань розмикання стулок, мм | |||||
| П18 | Зусилля утримування у відкритому стані, Н | |||||
| П19 | Зусилля прискорення закривання, Н | |||||
| П20 | Відстань змикання стулок, мм | |||||
| П21 | Зусилля утримування у закритому стані, Н | |||||
| П22 | Зона прив’язування «Відкрито», мм | |||||
| П23 | Зона прив’язування «Закрито», мм | |||||
| П24 | Швидкість замка при відкриванні, мм/с | |||||
| П25 | Швидкість замка при закриванні, мм/с | |||||
| П26 | Відстань закривання замків, мм | |||||
| П27 | Відстань старту закривання, мм | |||||
| П28 | Час реакції на упирання | |||||
| П29 | Передатне число приводу (/10) | - | ||||
| П30 | Стан виходів ВКО, ВКЗ, РВМ | |||||
| П31 | Зусилля утримування у проміжному положенні, Н | |||||
| П32 | Швидкість тестового руху, мм/с | |||||
| П33 | Відстань від’їзду під час реверсу, мм | |||||
| П34 | Максимально допустимий час відкривання, с | |||||
| П35 | Максимально допустимий час закривання, с | |||||
| П36 | Коефіцієнт корекції часу реакції на упирання | |||||
| П37 | Кінцеве зусилля відкривання | |||||
| П63 | Номер таблиці |
t1 – безредукторна балка, см. п. 5.3
t2 – балка с редуктором, см. п. 5.4
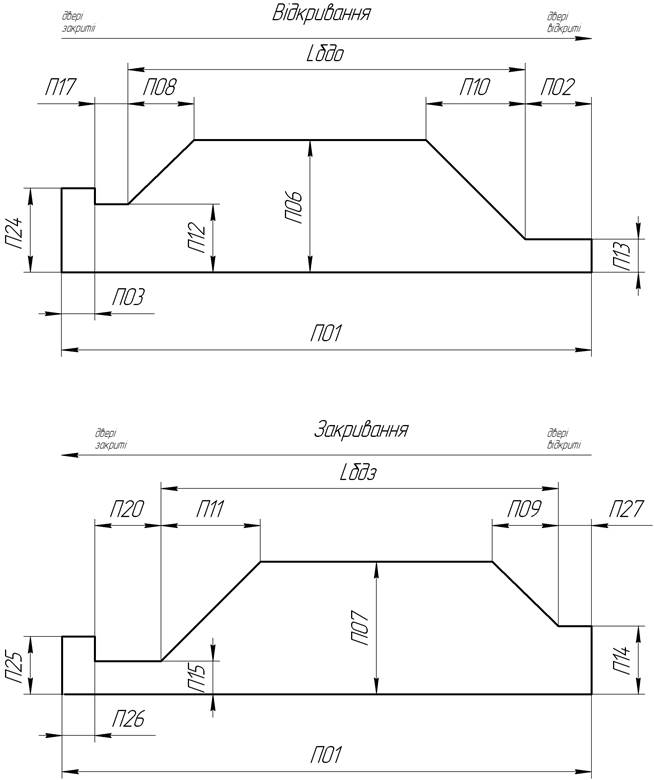
5.2. Діаграму руху відкривання дверей зображено на малюнку 4, діаграма руху закривання – на малюнку 5.
|
|
5.3. Таблиця параметрів t1 призначена для ліфтів з безредукторними балками дверей кабіни, у яких застосовано електродвигун АИР71В8, на валу якого насаджено шестірню з кількістю зубів Z=18 під зубчастий пас з кроком 5мм.
5.4. Таблиця параметрів t2 призначена для ліфтів з балками дверей кабіни, у яких застосовано електродвигун АИР71В8 і редуктор з передатним числом і=3,2, на вихідному валу якого насаджено шестірню з кількістю зубів Z=18 під зубчастий пас з кроком 5мм.
5.5. Таблиці t3- t7 є резервними (таблиці t5 і t6 не зображено)
5.6. У таблиці t8 наведені обмежувальні значення параметрів, вище яких значення параметру встановити неможливо.
5.7. Довжина ходу пасу П01 складається з довжини ходу ведучої стулки плюс хід відкривання/закривання замку.
5.8. Параметр П01 має наступні значення для дверей центрального відкривання залежно від ширини отвору:
| Ширина отвору, мм | |||||
| ПО1 |
5.9. Параметр П01 може бути встановлений наступними способами:
5.9.1. Встановити вручну згідно пп. 4.4.2 та 4.4.3., використовуючи дані п. 5.8.
5.9.2. Встановити значення П01, яке дорівнює 0. у цьому випадку привід на початку роботи при виконанні корекційного ходу виміряє та автоматично виконає запис параметру П01.
5.9.3. Виконати замір та запис параметру П01 у режимі {diSt }згідно п. 4.8.
5.10. Відстань прискорення П08 та уповільнення відкривання П10 встановлюються у відсотках від довжини швидкого ходу відкривання Lбдо, зображеного на малюнку 5.
5.11. Відстань прискорення П09 та уповільнення відкривання П11 встановлюються у відсотках від довжини швидкого ходу закривання Lбдз, зображеного на малюнку 6.
5.12. У параметрі П30 перша цифра ліворуч позначає стану виходу ВКО, друга – виходу ВКЗ, третя – виходу РВМ.
Нормально відкритому стану виходу (сигнал відсутній) відповідає цифра 0, нормально закритому стану виходу відповідає цифра 1.
- ЗАХОДИ БЕЗПЕКИ
6.1. Експлуатація приводів повинна здійснюватися відповідно до ДНАОП 0.00-1.21-98 «Правила безпечної експлуатації електроустановок споживачів» і інструкції з експлуатації до привода 2100.00.000 РЭ.
6.2. Персонал, який зайнятий обслуговуванням, налагодженням та ремонтом зобов’язаний:
- мати допуск до обслуговування електроустановок напругою до 1000 В і кваліфікаційну групу не нижче ІІІ;
- вивчити даний технічний опис та інструкцію з експлуатації;
6.3. Привід під час встановлення на кабіну ліфта повинен бути заземлений.
6.4. На платі блока управління існує небезпечна для життя напруга. Забороняється подавати напругу, якщо знята кришка корпусу блоку управління.
Після зняття напруги забороняється протягом 1 хвилини знімати кришку корпусу, що є необхідним для розряду конденсатора силового ланцюга.
- ПІДГОТОВКА ДО РОБОТИ
7.1. Установити привод на кабіну ліфта згідно технічної документації.
7.2. Виконати підключення блоку управління до електродвигуна, енкодера, станції ліфта і до мережі живлення згідно схеми зовнішніх підключень (мал. 2) і технічної документації на ліфт.
7.3. Подати напругу на блок управління приводу. Прилад автоматично переходить у режим «StAtE» і показує на дисплеї стан приводу.
7.4. Виконати запис необхідної заводської таблиці параметрів з пам’яті { ProGr } у пам’ять { Lift } згідно пп. 4.6.1. та 4.6.2. та рекомендаціям у пп. 5.3. та 5.4. У стані постачання з підприємства-виробника у приводі встановлено таблицю t1.
7.5. Встановити необхідну довжину ходу пасу параметр П01 одним із способів, вказаних у п. 5.9.
7.6. Увійти у режим «StAtE». Привід готовий до роботи.
7.7. У разі необхідності виконати індивідуальне додаткове налаштування параметрів приводу згідно п. 4.4.
- НОРМАЛЬНА РОБОТА ПРИВОДУ
8.1. Нормальна робота приводу здійснюється у режимі «StAtE» та складається з наступних тактів:
- «Синхронізація»;
- «Вимір довжини ходу»;
- «Утримання»;
- «Відкривання»;
- «Закривання»;
- «Механічна перешкода» (реверс).
8.2. Такт «Синхронізація»
8.2.1. Такт «Синхронізація» виконується при переході приводу в режим «StAtE»після подання живлення на Блок.
8.2.2. Привід штатно виконує усі команди, крім реверсу. Двері пересуваються на повільній швидкості тестового руху П32 о досягнення упору при відкриванні. При цьому лічильник положення синхронізується на нуль.
8.2.3. Якщо довжина ходу П01 у таблиці параметрів налаштування є заданою, після синхронізації на нуль двері починають рухатися згідно діаграм, що показані на мал. 4 та мал. 5.
8.3. Такт «Вимір довжини ходу»
8.3.1. Такт «Вимір довжини ходу» виконується після синхронізації у випадку початкового встановлення параметру П01, що дорівнює нулю.
8.3.2. Після синхронізації та віддання команди ЗД двері переміщуються на повільній швидкості тестового руху П32 до досягнення упору при закриванні. При цьому відбудеться вимір та запис довжини ходу П01 у таблицю параметрів налаштування.
8.4. Такт «Утримання»
8.4.1. Одностороннє утримання дверей здійснюється при закритому та відкритому положеннях дверей.
При закритому положенні зусилля утримання задається параметром П21. При цьому включено сигнал ВК3 і на дисплеї з’являється зображення { ─ ─ Θ ─ ─ }
При закритому положенні зусилля утримання задається параметром П18. При цьому включено сигнал ВКО і на дисплеї з’являється зображення {Θ ─ ─ ─ Θ}.
8.4.2. Двостороннє утримання дверей здійснюється у проміжних положеннях дверей за відсутності команд ВД та ЗД.
У проміжних положеннях зусилля утримання задається параметром П31. при цьому сигналі ВКЗ та ВКО відсутні, на дисплеї з’являється зображення { ─ [ ─ ] ─ }.
8.5. Такт «Відкривання»
8.5.1. Такт «Відкривання» виконується при призначенні команди ВД. При цьому виключається сигнал ВКЗ.
8.5.2. Рух дверей здійснюється за діаграмою на мал. 4, на дисплеї висвічується { ─ ─I─I─ ─ }.
8.5.3. У випадку, коли привід визначив наявність упору в зоні прив’язки П22 включається ВКО та відбувається синхронізація на нуль. Після цього привід переходить у режим одностороннього утримання, на дисплеї відображається позначка {Θ ─ ─ ─ Θ}.
8.5.4. У випадку, якщо привід визначив наявність упору до зони прив’язки П22, включається ВКО, але синхронізація на нуль не виконується. Після цього привід також переходить у режим одностороннього утримання.
На дисплеї з’являється помилка Е8 – ширина отвору, яка виміряна енкодером при виконанні команди ВД виявилася меншою допустимого значення. Помилка скидається при зміні коду напрямку руху.
У випадку повторення помилки Е8 вісім разів поспіль ВКО не включається.
8.5.5. Якщо привід визначив наявність упору після зони прив’язки П22, включається ВКО, відбувається синхронізація на нуль. Після цього привід також переходить у режим одностороннього утримання.
На дисплеї висвічується помилка Е5 – ширина отвору, яка виміряна енкодером при виконанні команди ВД виявилася більшою допустимого значення. Помилка скидається при зміні коду напрямку руху.
8.6. Такт «Закривання»
8.6.1. Такт «Закривання» виконується при призначенні команди ЗД. При цьому виключається сигнал ВКО.
8.6.2. Рух дверей здійснюється за діаграмою на мал. 5, на дисплеї відображається позначка { ─ ─I─I─ ─ }.
8.6.3. У випадку, якщо привід визначив наявність упору у зоні прив’язки П23, включається ВКЗ та виконується синхронізація на довжину ходу П01. Після цього привід переходить у режим одностороннього утримання, на дисплеї відображається позначка { ─ ─ Θ ─ ─ }.
8.6.4. Якщо привід визначив наявність упору до зони прив’язки П23, привід переходить у такт «Механічна перешкода» (реверс).
8.6.5. Якщо привід визначив наявність упору після зони прив’язки П23, включається ВКЗ, відбувається синхронізація на довжину ходу П01. після цього привід також переходить у режим одностороннього утримання.
На дисплеї висвічується помилка Е5 – ширина отвору, яка виміряна енкодером при виконанні команди ВД, виявилася більшою допустимого значення. Помилка скидається при зміні коду напрямку руху.
8.7. Такт «Механічна перешкода».
8.7.1. Привід здійснює перехід у такт «Механічна перешкода» із такту «Закривання» у разі наявності перешкоди у отворі до зони прив’язки П23 (див. п. 8.5.4.)
8.7.2. Після цілковитої зупинки дверей привід перейде у такт «Утримання», включається команда «РВМ», на дисплеї відображається позначка { ─ ] ─ [ ─ }.
8.7.3. Після подання станцією команди ВД привід зніме сигнал РВМ та перейде у режим «Відкривання».
- ХАРАКТЕРНІ НЕСПРАВНОСТІ І МЕТОДИ ЇХ УСУНЕННЯ
Таблиця 2.
| Ознаки несправності | Вірогідна причина | Метод усунення |
| 1. Не світиться дисплей сервісного пристрою | Перегорів мережний запобіжник на платі блоку управління | Замінити запобіжник У випадку повторного перегорання запобіжника замінити блок |
| 2. На дисплеї зафіксовано помилку Е1 – перевантаження по струму, привід не реагує на команди | Коротке замикання на виході з блоку | Усунути коротке замикання |
| 3. Привід не виконує команди «Відкрити» або «Закрити». Індикація положення дверей при призначенні команд не переключається | На входи «Відкрити» та «Закрити» помилково подано високу напругу, перегоріли запобіжники по входах «Відкрити» та «Закрити» | Усунути помилку у підключенні входів «Відкрити» та «Закрити», замінити запобіжники на платі блоку управління |
| 3. Привід не виконує команди «Відкрити» або «Закрити». Індикація положення дверей при призначенні команди ВД змінюється зі стану {─ ─ Θ ─ ─} у стан {Θ ─ ─ ─ Θ}, при призначенні команди ЗД – зі стану {Θ ─ ─ ─ Θ} у стан {─ ─ Θ ─ ─} | Енкодер несправний Недостатньо зусилля для переміщування дверей, невірно встановлені налаштування, несправна механіка | Перевірити енкодер за п. 4.7., замінити несправний енкодер. Встановити зусилля, необхідне для надійної роботи, перевірити справність механіки |
| 4. Із блоку не видаються сигнали ВКО, ВКЗ, РВМ | На входи ВКО, ВКЗ, РВМ помилково подано високу напругу, перегоріли запобіжники. | Усунути помилку у підключення входів ВКО, ВКЗ, РВМ, замінити запобіжники на платі блоку управління |
- ТРАНСПОРТУВАННЯ І ЗБЕРІГАННЯ
10.1. Привід необхідно транспортувати у закритому транспорті будь-якого виду. Умови транспортування приводів стосовно механічних чинників – Ж за ГОСТ 23216.
Граничні значення кліматичних чинників при транспортуванні:
- температура оточуючого повітря від -50о до +50оС;
- відносна вологість повітря 100% при температурі 25оС.
10.2. Привід необхідно зберігати у закритих приміщеннях при температурі оточуючого повітря від -50о до +40оС і відносній вологості повітря не більше 98 % при температурі 25оС.
10.3. Термін зберігання приводів в упаковці і з консервацією підприємства-виробника до введення в експлуатацію становить 1 рік.
Научно-производственное предприятие «Магнус»
ПРИВОД РЕГУЛИРУЕМЫЙ
МАГНУС-21
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
2100.00.000РЭ
Содержание
Лист
1. Назначение 22
2. Технические данные 22
3. Устройство привода 23
4. Режимы работы 26
5. Параметры настройки 30
6. Указание мер безопасности 32
7. Подготовка к работе 33
8. Нормальная работа привода 33
9. Характерные неисправности и методы их устранения 35
10. Транспортирование и хранение 36



|
|
|
|
|
|
НАЗНАЧЕНИЕ
Привод регулируемый Магнус-21 (далее именуемый «Привод») предназначен для применения в механизмах открывания и закрывания автоматических телескопических и центрального открывания дверей лифтов.
ТЕХНИЧЕСКИЕ ДАННЫЕ
2.1 Блок управления
Питающая сеть
Род тока сети переменный
Число фаз 1
Напряжение, В 220
Частота сети, Hz 50; 60
Потребляемый ток, не более, А 4,0
Выходная сеть из Блока
Род тока сети переменный
Число фаз 3
Напряжение, В 0…220
Частота сети, Hz 0…50
Потребляемый ток по фазе, не более, А 2,3
Степень защиты по ГОСТ 14254 IP 20
Напряжение на входах «открыть»,
«закрыть» сухой контакт/+24
Напряжение на ключах «реверс»,
«дверь открыта», «дверь закрыта»,
не более (пик), В 100
Ток через ключи «реверс», «дверь открыта»,
«дверь закрыта», не более, А 0,15
Предельные рабочие значения
температуры воздуха, оС -5…+55
Габаритные размеры, не более, мм 200х210х75
Масса, не более, кг 2
2.2 Энкодер
Род тока питания постоянный
Ток, А 0,01
Число каналов 2
Число зубцов прерывателя, шт 16; 60
Масса, не более, кг 0,06
2.4 Электродвигатель
Модель (рекомендуемая) АИР 63В4; АИР 71В8;
УСТРОЙСТВО ПРИВОДА
3.1 Привод содержит блок управления со встроенным сервисным прибором, энкодер и асинхронный электродвигатель.
Привод является составной частью балки двери кабины лифта, которая, как правило, имеет зубчатую ременную передачу с ведущим и ведомым шкивами и зубчатым ремнем, связанным с каретками дверей. Связь вала электродвигателя с ведущим шкивом может осуществляться через редуктор.
Совместимость Привода в работе с различными вариантами конструктивного исполнения балок обеспечивается настройками параметров, которые приведены далее в данном Руководстве в виде таблиц.
3.2 Блок управления (далее «Блок») предназначен для управления электродвигателем согласно сигналам от станции лифта и энкодера, обеспечивая безопасную и комфортную работу дверей кабины.
Блок содержит плату, расположенную в корпусе. Корпус имеет отсек со съемной крышкой для подключения через разъемы к плате кабелей, идущих от двигателя, энкодера, станции лифта и питающей сети. Внешний вид Блока приведен на рисунке 1, схема внешних подключений - на рисунке 2.
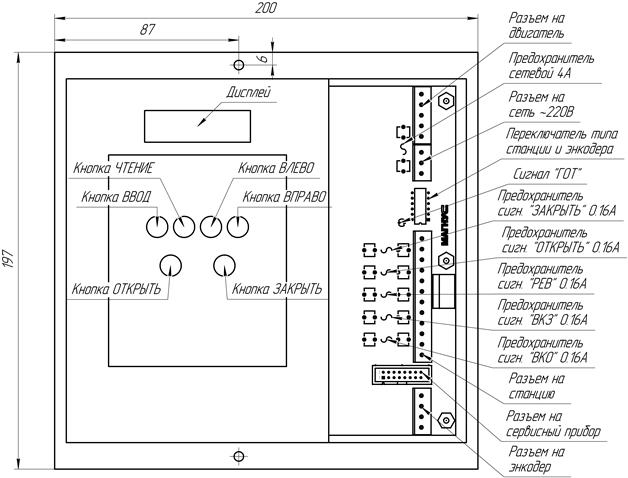
Рис.1 Внешний вид Блока
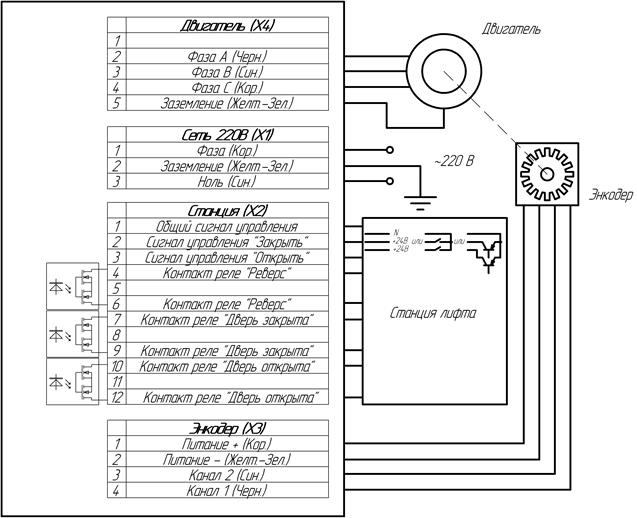
Рис.2 Схема внешних подключений
На плате установлены микропереключатели для выбора типа сигнала от станции, типа и уровня питания энкодера. Схема их состояний приведена на рисунке 3.
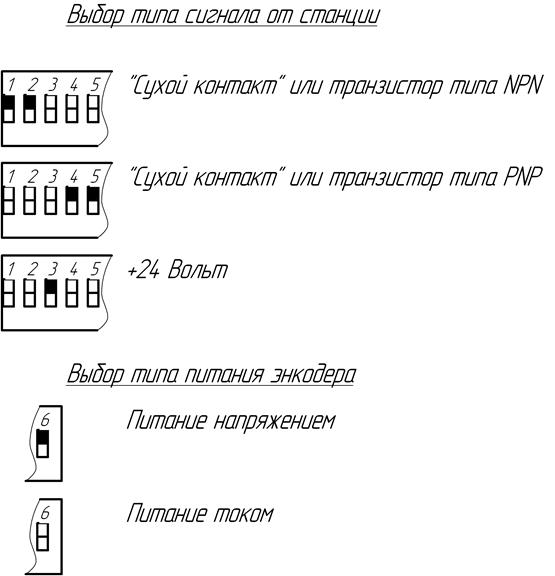
Рис.3 Схема состояний микропереключателей
Пример:
3.3 Сервисный прибор (далее «Прибор») содержит плату, закрепленную внутри корпуса Блока, а также дисплей и клавиатуру, расположенные на лицевой панели корпуса Блока (рис 1.)
3.4 Клавиатура прибора имеет шесть кнопок:
- «Ввод/Чтение»;
- «Отмена/Запись»;
- «<»;
- «>»
- «Открыть»;
- «Закрыть».
3.4.1 Кнопка «Ввод/Чтение» предназначена для:
- входа в выбранный режим работы;
- ввода номера таблицы;
- ввода номера параметра настройки;
- ввода значения параметра настройки.
- записи таблицы из памяти { Lift } в память { ProGr }.
3.4.2 Кнопка «Отмена/Запись» предназначена для:
- выхода на предыдущий уровень меню;
- записи таблицы из памяти { ProGr } в память { Lift }.
3.4.3 Кнопка «<» предназначена для:
- выбора режима работы;
- уменьшения номера параметра настройки;
- уменьшения значения параметра настройки;
- уменьшения номера таблицы.
3.4.4 Кнопка «>» предназначена для:
- выбора режима работы;
- увеличения номера параметра настройки;
- увеличения значения параметра настройки;
- увеличения номера таблицы.
3.4.5 Кнопки «Открыть» и «Закрыть» предназначены для подачи команд в режиме { StAtE } в процессе отладки привода. Для перехода в управление с указанных кнопок необходимо нажать кнопку «Ввод/Чтение» до появления левой части дисплея точки. В этом режиме Блок игнорирует сигналы станции. Переход на управление от станции выполняется кнопкой «Отмена/Запись» или автоматически в спящем режиме Прибора.
РЕЖИМЫ РАБОТЫ
4.1 Работа привода осуществляется в следующих режимах:
- { StAtE } – состояние;
- { Lift } – лифт;
- { ProGr }– программатор;
- { Encod } – энкодер;
- { diSt } – длина хода ремня;
- { Err } – ошибка.
4.2 В режим { StAtE } привод попадает автоматически при подаче питания. При этом осуществляется нормальная работа привода и на дисплее индицируется состояние привода:
- { ─ ─ Θ ─ ─ } – закрыто;
- { ─ ─I─I─ ─ } – движение;
- {Θ ─ ─ ─ Θ} – открыто;
- { ─ ] ─ [ ─ } – реверс;
- { ─ [ ─ ] ─ } – удержание;
- { ЕX } – ошибка.
При нажатии на кнопку «>» на дисплееприбора высвечивается один из параметров работы привода:
- E – положение в импульсах энкодера;
- L – положение в мм;
- S – установленная скорость, мм/с;
- U – выпрямленное напряжение в Блоке, В;
- P – относительное напряжение, подаваемое на двигатель в процентах от напряжения сети;
- t – время движения после подачи команды ОД или ЗД, с;
- F – заданное усилие, Н.
4.3 Режим { Lift }позволяет выполнять программирование, просмотр и редактирование значений параметров настройки в таблице в памяти { Lift }.
4.4 Порядок работы в режиме { Lift }.
4.4.1 Выбор режима { Lift }.
Установите с помощью кнопок «>» и «<» режим { Lift }. Нажмите кнопку «Ввод». На дисплее появится надпись { PASS }, предлагающая ввести пароль. Нажмите кнопку «Ввод». На дисплее появится надпись {0000}, при этомкрайняя левая цифра будет мигать. Установите с помощью кнопок «>» и «<» ее значение и нажмите кнопку «Ввод». Первая цифра пароля будет установлена, замигает вторая цифра. Аналогично необходимо ввести все четыре цифры пароля. Пароль пользователя по умолчанию – {0285}. После этого на дисплее появятся пять цифр. Двухзначное число в левой части дисплея показывает номер параметра настройки. Трехзначное число в правой части дисплея показывает значение данного параметра.
4.4.2 Выбор номера параметра настройки.
Установите с помощью кнопок «>» и «<» требуемый номер параметра настройки (две цифры слева) и нажмите кнопку «Ввод». Правые три цифры переходят в режим мигания.
4.4.3 Установка значения параметра настройки.
Установите с помощью кнопок «>» и «<» требуемое значение параметра настройки (три цифры справа) и нажмите кнопку «Ввод». Для возврата к ранее установленному значению параметра нажмите кнопку «Отмена».
4.4.4 Установите необходимые значения всех параметров настройки в таблице, повторяя действия по пп.4.4.2 и 4.4.3.
4.4.5 Нажмите кнопку «Отмена/Запись». Привод перейдет в режим { StAtE } и готов к работе.
4.5 Режим { ProGr } позволяет выполнять функции:
- просмотр 8 заводских и 8 пользовательских таблиц параметров настройки в памяти { ProGr };
- запись 8 заводских и 8 пользовательских таблиц параметров настройки из памяти { ProGr } в память{ Lift };
- чтение таблицы параметров настройки из памяти { Lift } и запись в одну из 8 пользовательских таблиц памяти { ProGr }.
4.6 Порядок работы в режиме { ProGr }.
4.6.1 Выбор режима { ProGr }.
Установите с помощью кнопок«>» и «<» режим { ProGr }. Нажмите кнопку «Ввод». В левой части дисплея появится обозначение последней просматриваемой таблицы параметров:
- tX – заводская таблица параметров настройки;
- FX – пользовательская свободная таблица параметров настройки;
- bX – пользовательская заполненная таблица параметров настройки.
Правая часть дисплея при этом погашена.
4.6.2 Выбор типа и номера таблицы параметров.
Выберите с помощью кнопок «>» и «<» тип и номер таблицы параметров. Для записи выбранной заводской или пользовательской заполненной таблицы параметров из памяти { ProGr } в память{ Lift } нажмите кнопку «Отмена/Запись» на время более 1 секунды. Запись пользовательской свободной таблицы параметров настройки невозможна.
Для записи таблицы параметров настройки из памяти { Lift } в выбранную пользовательскую таблицу памяти { ProGr } нажмите кнопку «Ввод/Чтение» на время более 1 секунды. Запись в заводские таблицы параметров настройки невозможна.
Для выхода из состояния «Номер таблицы» без записи или чтения нажмите кнопку «Отмена/Запись» на время менее 1 секунды.
4.6.3 Просмотр таблиц параметров настройки.
После выбора таблицы параметров настройки нажмите клавишу «Ввод». На дисплее появятся пять цифр. Двухзначное число в левой части дисплея показывает номер параметра настройки. Трехзначное число в правой части дисплея показывает значение данного параметра. С помощью кнопок «>» и «<» осуществляется просмотр параметров.
4.7 Режим { Encod } позволяет осуществлять диагностику энкодера.
Для диагностики энкодера установите с помощью кнопок «>» и «<» режим { Encod }. Нажмите кнопку «Ввод». На дисплее появится индикация { ― ― ― ― ― }. Вручную переместите двери кабины на расстояние не менее 200 мм. При исправном энкодере на дисплее появится индикация { Good } и привод перейдет в нормальную работу.Если сохранилась индикация { ― ― ― ― ― } – энкодер неисправен.
4.8 Режим { diSt } позволяет произвести замер и запись в таблицу параметров памяти { Lift } длину хода ремня. Установите с помощью кнопок«>» и «<» режим
{ diSt }. Нажмите кнопку «Ввод». Привод произведет автоматический замер длины хода ремня, кратковременно высветит его значение, запишет в таблице параметров памяти { Lift }параметр 01 и перейдет в нормальную работу.
Если после окончания замера на дисплее появится сообщение об ошибке Е5 – недоезд или Е8 - переезд, необходимо произвести повторный замер.
4.9 При появлении ошибки в работе привода на дисплее высвечивается обозначение ошибки. Привод определяет следующие виды ошибок:
-Е0 – ошибка связиприбора с блоком. Ошибка сбрасывается автоматически при восстановлении устойчивой связи Приборас Блоком;
-E1 –перегрузка по току,т. е.ток выходных ключей превысил пороговое значение,заданное аппаратно. Ошибка снимается при выключении и повторном включении Блока;
-E2 –напряжение питающей сети вне допустимых пределов, т. е.напряжение на выходных ключах превышает 410В или ниже 225В. При снижении напряжения до 350В или повышения до 240В Блок запускается автоматически;
-Е3 – перегрев радиатора Блока управления. При снижении температуры до допустимого значения Блок запускается автоматически;
-Е4 – сгорел один из предохранителей по входам ОД, ЗД или выходам ВКО, ВКЗ, РВМ. Необходимо устранить причинусгорания и заменить предохранитель. Причиной сгорания предохранителей, как правило, является ошибочная подача высокого напряжения на входы;
- Е5 – ширина проема, измеренная энкодером при выполнении команды ОД или ЗД оказалась больше допустимого значения.Ошибка сбрасывается при смене коданаправления движения. При повторном возникновении данной ошибки нужно провести измерение проема и проверить механику привода;
- Е6 – таймаут движения,превышено максимальное время открытия или закрытия,которые задаются в таблице параметров. Ошибка сбрасывается при смене кода направления движения;
- E7 –ошибка направления,одновременно поданы команды ОД и ЗД. Ошибкасбрасывается при подаче верного кода направления;
- E8 –ширина проема, измеренная энкодером при выполнении команды ОД оказалась меньше допустимого значения.Ошибка сбрасывается при смене коданаправления движения. При повторном возникновении данной ошибки нужно провести измерение проема и проверить механику привода.
4.10 Просмотр ошибок можно осуществить войдя в Режим { Err }. При нажатии на кнопку «Ввод» в данном пункте меню осуществляется переход в менювторого уровня, состоящее из пунктов:
- Err
↓
Cntr ↔ HiSt ↔ CLr
Cntr –счетчик количества ошибокпо каждому типу отдельно;
HiSt – последовательность возникновения ошибок;
CLr – сброс счетчика количества ошибок.
ПАРАМЕТРЫ НАСТРОЙКИ
5.1 Параметры настройки привода для работы с лифтами различных модификаций приведены в таблице 1.
Таблица 1
| № | Наименование параметра | Таблица параметров | ||||
| t1 | t2 | t3 | t4 | t8 | ||
| П00 | Направление вращения вала при открывании: - против часовой стрелки - по часовой стрелке | |||||
| П01 | Длина хода ремня, мм | п5.8 | ||||
| П02 | Остановочное расстояние открывания, мм | |||||
| П 03 | Расстояние открывания замков, мм | |||||
| П 04 | Усилие открывания, кроме ускорения, Н | |||||
| П 05 | Усилие закрывания, кроме ускорения, Н | |||||
| П 06 | Скорость открывания маршевая, мм/с | |||||
| П 07 | Скорость закрывания маршевая, мм/с | |||||
| П 08 | Расстояние ускорения открывания, % | |||||
| П 09 | Расстояние ускорения закрывания, % | |||||
| П 10 | Расстояние замедления открывания, % | |||||
| П 11 | Расстояние замедления закрывания, % | |||||
| П 12 | Стартовая скорость открывания, мм/с | |||||
| П 13 | Конечная скорость открывания, мм/с | |||||
| П 14 | Стартовая скорость закрывания, мм/с | |||||
| П 15 | Конечная скорость закрывания, мм/с | |||||
| П 16 | Усилие ускорения открывания, Н | |||||
| П 17 | Расстояние размыкания створок, мм | |||||
| П 18 | Усилие удержания в открытом состоянии, Н | |||||
| П 19 | Усилие ускорения закрывания, Н | |||||
| П 20 | Расстояние смыкания створок, мм | |||||
| П 21 | Усилие удержания в закрытом состоянии, Н | |||||
| П 22 | Зона привязки «Открыто», мм | |||||
| П 23 | Зона привязки «Закрыто», мм | |||||
| П 24 | Скорость замка при открывании, мм/с | |||||
| П 25 | Скорость замка при закрывании, мм/с | |||||
| П 26 | Расстояние закрывания замков, мм | |||||
| П 27 | Расстояние старта закрывания, мм | |||||
| П 28 | Время реакции на упор | |||||
| П 29 | Передаточное число привода (/10) | - | ||||
| П 30 | Состояние выходов ВКО, ВКЗ, РВМ | |||||
| П 31 | Усилие удержания в промежуточном положении, Н | |||||
| П 32 | Скорость тестового движения, мм/с | |||||
| П 33 | Расстояние отъезда при реверсе, мм | |||||
| П 34 | Максимальное допустимое время открывания, с | |||||
| П 35 | Максимальное допустимое время закрывания, с | |||||
| П 36 | Коэффициент коррекции времени реакции на упор | |||||
| П 37 | Конечное усилие открывания | |||||
| П 63 | Номер таблицы |
t1 – безредукторная балка, см. п. 5.3
t2 – балка с редуктором, см. п. 5.4
5.2 Диаграмма движения открывания двери изображена на рисунке 4, диаграмма движения закрывания - на рисунке 5.
|

|
|
Date: 2016-08-30; view: 330; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |