Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Кинематика механизмов
Основная функция любого механизма заключается в преобразовании движения ведущего звена (звеньев) в определенное движение ведомого вена (звеньев). Процедура определения параметров этих движений называется кинематическим анализом механизма.
Задание 2
Выполнить кинематический анализ рычажного механизма, показанного на рисунке 3, графическим методом. Параметры механизма выбрать по таблице 2.
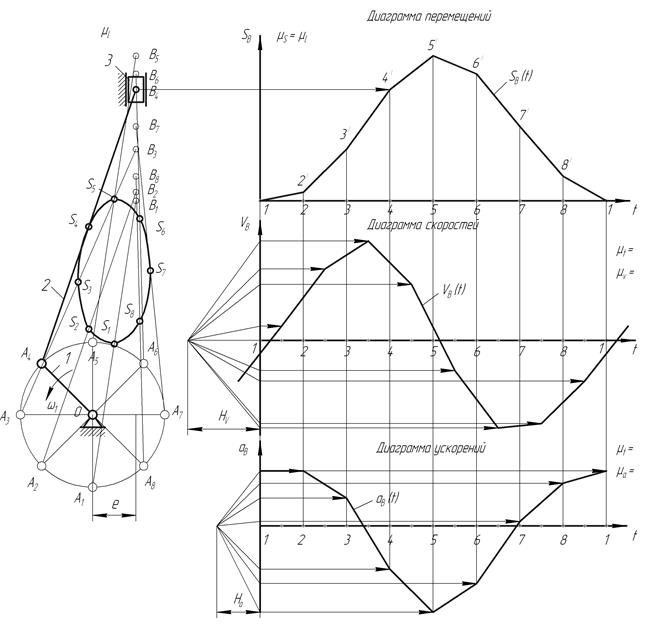
Рисунок 3 – Схема механизма и графические построения к заданию 2
Таблица 2 – Варианты параметров механизма к заданию 2
| Переменные параметры | |||||||||

| Последняя цифра шифра | ||||||||
| 1,5 | 1,7 | 2.0 | 2,2 | 2,5 | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 |

| Предпоследняя цифра шифра | ||||||||
| 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0.8 | 0,9 | |
| Постоянные параметры | |||||||||
| ω =1 мc–1; LOA=0,025 м; LAS=0,5 LAB |
Порядок работы:
1) вычертить кинематическую схему механизма в 8 совмещенных положениях, как показано на рисунке 3. Масштаб построения определить по формуле:
µl = LOA / [OA], м/мм,
где lOA – длина звена ОА, м;
[ОА], мм – отрезок, изображающий это звено на схеме.
2) вычертить шатунную кривую – траекторию точки S, принадлежащей звену 2;
3) построить диаграмму перемещений точки В, отложив по оси ординат линейное перемещение этой точки, а по оси абсцисс – время одного оборота кривошипа (звена 1). Масштаб по оси ординат µS принять равным µl. Масштаб по оси абсцисс:
µt = 2π/ωL, c–1/ мм,
где L – выбирается произвольно (например, 120 мм);
ω – угловая скорость кривошипа, c–1.
4) построить диаграмму скоростей точки В способом графического дифференцирования. Для этого на продолжении оси абсцисс диаграммы скоростей на расстоянии Hv (например, 20 мм) от ее начала выбрать точку Рv. Через эту точку провести прямую, параллельную хорде 1-21 (диаграммы перемещений). Пересечение проведенной прямой с осью ординат соответствует значению скорости точки В на середине отрезка 1-2 оси абсцисс диаграммы скоростей. Далее алогичным образом сносят хорды 21-31, 31-41, 41-51…
Масштаб скорости определить по формуле:
µv = µS/ Hv µt, м c–1 /мм.
5) аналогичным образом построить диаграмму ускорения точки В, дифференцируя по времени диаграмму скоростей. Масштаб ускорения:
µа = µS/ Hv µt, м c–1 /мм.
6) определить численные значения скорости и ускорения точки В для восьми положений механизма, умножив ординаты точек на диаграммах (в мм) на соответствующий масштаб (µv или µа). Так например скорость точки В в положении 2: vВ = 2–21∙µv, а ускорение аВ = 2–22∙ µа. Результаты занести в таблицу.
Задание 3
Обеспечить заданное (таблица 3) передаточное число редуктора, схема которого показана на рисунке 4.

а – коническо-цилиндрический (imax = 25); б – двухступенчатый цилиндрический (imax = 40); в – цилиндро-червячный ((imax = 150); г – двухступенчатый червячный ((imax = 2000); д – трёхступенчатый цилиндрический (imax = 125)
Рисунок 4 – Типы редукторов
Таблица 3 – Варианты задания 3 (две последние цифры шифра)
| Передаточное число | Схема редуктора | ||||
| а | б | в | г | д | |
| 01; 02 | 17; 18 | ||||
| 03; 04 | 19; 20 | ||||
| 12,5 | 05; 06 | 21; 22 | |||
| 07; 08 | 23; 24 | 38; 39; 40 | |||
| 09; 10 | 25; 26 | 41; 42; 43 | |||
| 11; 12 | 27; 28 | 44; 45; 46 | |||
| 31,5 | 13; 14 | 29; 30; 31 | 47; 48; 49 | ||
| 15; 16 | 32; 33; 34 | 50; 51; 52 | |||
| 35; 36; 37 | 53; 54; 55 | 68; 69; 70 | |||
| 56; 57; 58 | 71; 72; 73 | ||||
| 59; 60; 61 | 74; 75; 76 | ||||
| 62; 63; 64 | 77; 78; 79 | 89; 90; 91 | |||
| 65; 66; 67 | 80; 81; 82 | 92; 93; 94 | |||
| 83; 84; 85 | 95; 96; 97 | ||||
| 86; 87; 88 | 98; 99; 100 |
Все представленные механизмы (редукторы) состоят из простейших зубчатых передач (ступеней), последовательно соединенных в кинематическую цепь. Передаточное отношение I12 простейшего зубчатого механизма (отдельной ступени) равно отношению числа зубьев Z2 ведомого колеса к числу зубьев Z1 ведущего колеса этой ступени. Общее передаточное число ступенчатого зубчатого механизма I1П, т.е. отношение угловой скорости ω1 ведущего звена к угловой скорости ωП ведомого звена, равно произведению передаточных отношений отдельных ступеней. Так например, общее передаточное число механизма, показанного на рисунке 4 а, определится по формуле:
I1П = I12 ∙ I34 = (Z2/Z1) ∙(Z4/Z3).
Рациональные диапазоны значений передаточных отношений:
цилиндрической ступени 2 – 8;
конической ступени 1 – 6;
червячной ступени 8 – 80.
Для выполнения задания необходимо:
1) подобрать передаточные отношения ступеней так, чтобы их значения находились в рациональном диапазоне, а произведение соответствовало заданному передаточному числу редуктора;
2) выбрать числа зубьев зубчатых колес так, чтобы сумма чисел зубьев двух колес цилиндрической ступени находилась в диапазоне 100 – 200; конической – 50 – 150, а число зубьев (заходов червяка) было от 1 до 4.
Допускается отклонение полученного общего передаточного числа I1П редуктора от заданного до 5 процентов.
Date: 2016-07-25; view: 372; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |