Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
асинхронныЕ двигатели
Методические указания к лабораторным работам
Омск 2002
Данный курс лабораторных работ проводится на ЭВМ в программах "Rejim" и "Model". Перед началом работы студенты должны изучить возможности программ и основные принципы работы с ними. Необходимые сведения приведены в приложении.
ЛАБОРАТОРНАЯ РАБОТА № 1
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ
В НОМИНАЛЬНОМ РЕЖИМЕ РАБОТЫ
Цель работы. Исследование основных характеристик короткозамкнутого асинхронного двигателя (АД) в номинальном режиме.
1. Домашнее задание
1.1. Повторить принцип действия короткозамкнутого АД [1].
1.2. Определить следующие параметры для асинхронного двигателя (тип и мощность двигателя задаются преподавателем): номинальный ток статора  , А, параметры схемы замещения
, А, параметры схемы замещения  , Ом, а также номинальную частоту вращения вала двигателя, используя соотношения (1.1) - (1.4).
, Ом, а также номинальную частоту вращения вала двигателя, используя соотношения (1.1) - (1.4).
Номинальный ток статора
 , (1.1)
, (1.1)
где  – номинальная мощность двигателя, Вт;
– номинальная мощность двигателя, Вт;
 – номинальное фазное напряжение двигателя, В;
– номинальное фазное напряжение двигателя, В;
 – коэффициент полезного действия двигателя в номинальном режиме;
– коэффициент полезного действия двигателя в номинальном режиме;
 – коэффициент мощности двигателя в номинальном режиме.
– коэффициент мощности двигателя в номинальном режиме.
Параметры схемы замещения выражаются следующим образом:
 ; (1.2)
; (1.2)
 , (1.3)
, (1.3)
где  ,
,  – справочные значения параметров схемы замещения, о. е.
– справочные значения параметров схемы замещения, о. е.
Номинальная частота вращения вала двигателя
 , (1.4)
, (1.4)
где  – номинальное скольжение.
– номинальное скольжение.
При определении параметров схемы замещения использовать справочные данные [2, 3].
2. Порядок работы
2.1. Ввести параметры схемы замещения в окне задания параметров двигателя программы Rejim (см. прил.).
2.2. Выполнить расчет номинального режима в программе.
2.3. Снять графики зависимостей  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
2.4. Определить значение напряжения, которое необходимо подать на статор, чтобы увеличить максимальный момент двигателя на 20 %. Проверить полученный результат в программе Rejim, изменив значение напряжения в окне задания параметров.
2.5. Увеличить  в 2 раза, снять и проанализировать графики зависимостей , .
в 2 раза, снять и проанализировать графики зависимостей , .
3. Контрольные вопросы
3.1. Принцип действия асинхронного двигателя.
3.2. Способы изменения пускового момента асинхронного двигателя (с короткозамкнутым и фазным ротором).
3.3. Чем определяются максимальный момент и критическое скольжение асинхронного двигателя?
3.4. Объяснить характер механической характеристики АД.
3.5. Объяснить характер зависимости  и рабочих характеристик двигателя.
и рабочих характеристик двигателя.
3.6. Способы изменения частоты вращения АД.
3.7. Схема замещения и уравнения АД.
4. Содержание отчета
4.1. Цель работы
4.2. Т-образная схема замещения АД.
4.3. Расчетная часть.
4.4. Графики зависимостей, полученные в ходе работы.
4.5. Анализ полученных в п. 2.5 зависимостей.
ЛАБОРАТОРНАЯ РАБОТА № 2
ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В СИСТЕМЕ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ ДВИГАТЕЛЬ
Цель работы. Изучение принципа действия преобразователя частоты с углом управления α =1800 и с ШИМ; исследование электромагнитных процессов в системе трехфазный автономный инвертор напряжения (АИН) - АД.
Лабораторная работа проводится в два этапа. На первом этапе рассматриваются электромагнитные процессы в исследуемой системе с углом управления α = 1800, на втором этапе – в системе с ШИМ.
1. Теоретические сведения
При частотном управлении асинхронный двигатель представлен Т-образной схемой замещения при переменной частоте (рис. 1).
Рис.1. Схема замещения фазы АД при частотном регулировании
 – относительная частота статора;
– относительная частота статора;
 – частота первой гармоники подаваемого на статор напряжения;
– частота первой гармоники подаваемого на статор напряжения;
 – номинальная частота напряжения (50 Гц);
– номинальная частота напряжения (50 Гц);
 – абсолютное скольжение;
– абсолютное скольжение;
 – э.д.с., учитывающая действие магнитного потока статора;
– э.д.с., учитывающая действие магнитного потока статора;
 – э.д.с., учитывающая действие магнитного потока ротора;
– э.д.с., учитывающая действие магнитного потока ротора;
 – э.д.с., учитывающая действие основного (рабочего) магнитного потока
– э.д.с., учитывающая действие основного (рабочего) магнитного потока
Преобразователь частоты выполнен на основе транзисторного автономного инвертора напряжения (АИН) со звеном постоянного тока (ЗПТ). Функциональная схема преобразователя приведена на рис. 2. Звено постоянного тока выполнено по схеме трехфазного мостового неуправляемого выпрямителя с L-C фильтром, система управления инвертором (СУИ) обеспечивает необходимое напряжение на выходе в соответствии с выбранным алгоритмом управления.
Напряжение на нагрузке при алгоритме управления с a = 180o (рис. 3) формируется следующим образом. В любой момент времени одна фаза нагрузки через соответствующую пару силовой транзистор – обратный диод подключена к шине «минус», а две другие – к шине «плюс» или наоборот: одна фаза подключена к шине «плюс», а две другие – к шине «минус». Соответственно фазное напряжение на последовательно включенной фазе равно ± 2/3Е, а на параллельно включенной ±1/3Е. Знак напряжения зависит от того, к какой шине подключается фаза нагрузки. Структура силовой части АИН изменяется через каждую треть периода, в результате фазное напряжение имеет прямоугольно-ступенчатую форму, а линейное напряжение – форму импульса длительностью 2p/3 и паузой на нуле p/3. Фазный ток нагрузки является реакцией на фазное напряжение.
Ток в звене постоянного тока id равен току в последовательно включенной фазе. Если фазный ток меняет знак при q < p/3, реактивный ток данной фазы замыкается через две другие фазы. В этом режиме имеют место интервалы, когда проводят два транзистора и один диод, и интервалы, когда проводят три транзистора. При этом ток id всегда имеет положительное направление. Если q > p/3, то чередуются интервалы, когда проводят два транзистора и один диод или два диода и один транзистор. В этом режиме реактивный ток фазы нагрузки не может полностью скомпенсироваться в двух других фазах и ток id имеет интервалы с отрицательным направлением тока. Для компенсации этого тока при питании АИН от выпрямителя на входе АИН устанавливают конденсатор.
Недостаток данного способа управления инвертором – невозможность изменения напряжения на двигателе без изменения напряжения в звене постоянного тока.
Для регулирования амплитуды напряжения на выходе инвертора при питании от неуправляемого выпрямителя основным методом стала широтно-импульсная модуляция (ШИМ). Применение широтно-импульсной модуляции обеспечивает близкую к синусоидальной форму фазного тока двигателя в широком диапазоне регулирования. Соответственно уменьшаются потери и дополнительные паразитные моменты от высших гармоник.
Для обеспечения паузы на нуле в кривой выходного напряжения АИН с ШИМ все три фазы нагрузки одновременно подключаются к положительной либо к отрицательной шине звена постоянного тока.
Рис. 2. Функциональная схема преобразователя
Рис. 3
Рис.4. Алгоритм управления, реализующий однополярную синусоидальную ШИМ
Формирование алгоритма переключения силовыми элементами инвертора и реализация заданного закона частотного управления обеспечиваются системой управления инвертором (СУИ). Современные СУИ выполняются на основе микропроцессорной техники.
На рис. 4 показан алгоритм управления силовой частью инвертора, реализующий однополярную ШИМ по синусоидальному закону. Здесь же приведены кривые выходного (линейного) напряжения АИН. Импульсы управления, подчиняющиеся закону модуляции, показаны на рисунке заштрихованными. Данный метод ШИМ реализован в программе Model.
2. Домашнее задание
2.1. Повторить принцип действия автономного инвертора напряжения при работе на активно-индуктивную нагрузку.
2.2. Изучить особенности работы АИН с ШИМ.
2.3. Изучить основные принципы частотного управления асинхронным двигателем.
3. Порядок работы
Первое занятие
3.1. Ввести параметры схемы преобразователя и схемы замещения в окне задания параметров двигателя программы Model (см. руководство пользователя программы). Тип двигателя задается преподавателем.
3.2. Выполнить пункт меню расчеты – моделирование системы ПЧ с ШИМ – АД (алгоритм управления альфа = 180) для номинального режима работы двигателя:
– частота f1 = 50 Гц;
– абсолютное скольжение β* = βном.
Снять графики зависимостей фазного и линейного напряжений Uфаз(wt), Uлин(wt).
3.3. Рассмотреть следующие режимы работы системы:
1. f1 = 5 Гц, β* = βном;
2. f1 = 5 Гц, β* = 0,05∙βном;
3. f1 = 40 Гц, β* = βном;
4. f1 = 40 Гц, β* = 0,05∙βном.
Снять временные диаграммы:
– фазного тока Iф(wt) во всех четырех случаях;
– токов через транзистор Ivt(wt) и через диод Ivd(wt) в 1м режиме;
– тока в звене постоянного тока Id(wt) в 1м и 2м режимах работы.
Объяснить форму кривой тока Id(wt). Проанализировать и объяснить различия в формах кривых фазного тока двигателя в рассмотренных случаях.
Второе занятие
Повторить действия п. 3.1.
3.4. В меню пункта расчеты – моделирование системы ПЧ с ШИМ – АД выполнить моделирование алгоритма управления Пси 1 =const. В окне задания режима работы двигателя рассмотреть следующий случай:
– частота f1 = 50 Гц;
– абсолютное скольжение β* = 0,9∙βном. (если значение 0,9 отсутствует, следует ввести его в меню "Списки значений", см. руководство пользователя).
Снять временные диаграммы фазного и линейного напряжений Uфаз(wt), Uлин(wt), фазного тока Iф(wt). Посмотреть и проанализировать диаграммы токов Ivt(wt), Ivd(wt), Id(wt).
3.5. Выполнить пункт меню расчеты – построение зависимостей. Пси 1 =const. В этом режиме программа выполнит четыре расчета, каждый раз запрашивая новые значения частоты и абсолютного скольжения. Частота f1 принимается постоянной и равной 50 Гц. Значения абсолютного скольжения вводятся по согласованию с преподавателем.
Требуется снять зависимости глубины модуляции от относительной частоты (Мю(альфа)) для заданных значений β. Объясните, почему полученные характеристики параллельны.
3.6. Повторите п. 3.4 для следующих значений:
– частота f1 = 20 Гц;
– абсолютное скольжение β* = 0.5∙βном.
Зарисуйте временную диаграмму фазного тока Iф(wt). Посмотрите и сравните диаграммы токов Ivt(wt), Ivd(wt), Id(wt) с полученными в п. 3.4.
4. Контрольные вопросы
4.1. Принцип действия АИН, назначение элементов схемы инвертора.
4.2. Как обеспечивается независимость формы напряжения АИН от параметров нагрузки?
4.3. Объясните зависимость формы кривой фазного тока от величины нагрузки на валу двигателя и значения частоты f1.
4.4. При каких условиях ток в звене постоянного тока принимает отрицательные значения?
4.5. Каким образом обеспечивается компенсация реактивной мощности в системе ПЧ – АД?
5. Содержание отчета
5.1. Цель работы.
5.2. Функциональная схема преобразователя.
5.3. Схема замещения двигателя при переменной частоте.
5.4. Графики зависимостей, полученные в ходе работы.
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ
ПРИ РАЗЛИЧНЫХ ЗАКОНАХ ЧАСТОТНОГО УПРАВЛЕНИЯ
Цель работы. Изучение основных законов частотного управления и их особенностей; получение электромеханических характеристик двигателя для различных законов управления.
1. Теоретические сведения
Основные законы частотного регулирования
1.1. Основной закон М. П. Костенко
В работе, положившей начало частотному управлению, академик М. П. Костенко установил следующий закон управления амплитудой и действующим значением напряжения в зависимости от частоты: чтобы обеспечить оптимальный режим работы асинхронного двигателя при всех значениях частоты и нагрузки, относительное напряжение двигателя необходимо изменять пропорционально произведению относительной частоты на корень квадратный из относительного момента двигателя. Этот закон частотного управления можно записать уравнением:
 . (1.1)
. (1.1)
Закон был получен в пренебрежении падением напряжения в активных сопротивлениях статора и насыщением магнитной цепи.
Основополагающим в законе является то, что напряжение необходимо регулировать так, чтобы коэффициент статической перегружаемости
 (1.2)
(1.2)
оставался одинаковым при разных частотах. Так как максимальный момент изменяется пропорционально квадрату потока в воздушном зазоре Ф, то для этого необходимо, чтобы
 . (1.3)
. (1.3)
Но в первом приближении
 , (1.4)
, (1.4)
откуда и следует основное уравнение (1.1).
Закон учитывает свойства нагрузки. Если она с уменьшением частоты также уменьшается из-за сопутствующего почти пропорционально частоте уменьшения угловой скорости, то нет смысла сохранять поток двигателя на том же уровне. Его можно уменьшить настолько, чтобы только сохранить старый номинальный коэффициент статической перегружаемости, т. е. запас статической устойчивости.
Уменьшение потока с уменьшением нагрузки при том же запасе устойчивости дает уменьшение потерь в стали двигателя и повышает экономичность привода с частотным управлением и часто меняющейся нагрузкой по сравнению с асинхронным двигателем при постоянной частоте [4].
Практическое применение основного закона ограничивают трудности непосредственного измерения момента на валу двигателя.
1.2. З акон частотного управления U / f1 = const
Нетрудно видеть, что этот закон получается из закона Костенко при постоянном номинальном моменте. Его называли номинальным потому, что паспортные данные специальных серий короткозамкнутых асинхронных двигателей, выпускаемых промышленностью, указывались применительно к закону U = U номa. При a = 1¸0,5 двигатель работает в условиях, мало отличающихся от номинальных. Но при дальнейшем уменьшении частоты момент АД значительно уменьшается. Это происходит из-за возрастающего влияния падения напряжения в активных сопротивлениях статора I1×r, что приводит к уменьшению ЭДС
 (1.5)
(1.5)
и магнитного потока двигателя.
При уменьшении частоты статора поток снижается за счет падения I1×r тем больше, чем больше частота ротора f2 (т. е. абсолютное скольжение).
Можно сформулировать следующее общее условие работы АД: при управлении по номинальному закону U = U номa и при пониженных частотах двигатель имеет такие же значения токов, потоков, абсолютного скольжения и момента, какие он имел бы при номинальной частоте, но с увеличенными обратно пропорционально частоте активными сопротивлениями статора. Все мощности уменьшаются пропорционально частоте, а относительное скольжение увеличивается обратно пропорционально частоте.
Таким образом, можно сделать вывод: закон U / f1 = const применим для электроприводов с небольшим диапазоном регулирования (» 1 ¸2).
Положительной особенностью данного закона является простота реализации в системах с широтно-импульсной модуляцией.
1.3. Закон постоянства полного потока статора (закон I×r-компенсации)
Органический недостаток номинального закона управления напряжением заключается в уменьшении потока с понижением частоты из-за падения напряжения в первичных активных сопротивлениях фаз двигателя. Отсюда возникла идея обеспечения такого закона регулирования напряжения, при котором устранялось бы влияние этих сопротивлений на поток двигателя.
Для решения этой задачи предложено регулировать напряжение U1 при изменении нагрузки так, чтобы скомпенсировать влияние на величину E1 падения напряжения на активном сопротивлении статора [4]:
.
При этом выполняется условие
 или Y1 = const.
или Y1 = const.
Свойства данного закона:
1) максимальный момент не зависит от частоты и остается неизменным;
2) увеличивается перегрузочная способность двигателя по сравнению с естественным режимом;
3) абсолютное скольжение b при любом значении момента не зависит от частоты;
4) рабочий поток Y0 не зависит от частоты, а от нагрузки он зависит так же, как при номинальной частоте;
Основным достоинством режима Y1 = const является то, что при всех частотах сохраняются такие же условия работы двигателя, как при номинальной частоте.
1.4. Закон постоянства рабочего потока (Y0 = const)
Компенсация падения напряжения в активных сопротивлениях статора обеспечивает постоянство полного потока статора при всех частотах, но не устраняет снижения рабочего потока (т. е. потока в воздушном зазоре) с увеличением нагрузки из-за падения напряжения в индуктивных сопротивлениях, учитывающих потоки рассеяния статора. Это снижение рабочего потока сказывается в равной мере при всех частотах [5].
Режим постоянного рабочего потока может быть получен аналогично режиму постоянного полного потока статора компенсацией падения напряжения в полных первичных сопротивлениях схемы замещения соответствующим повышением напряжения на зажимах двигателя в функции частоты и нагрузки.
Если эти условия выполнены, то максимальные значения момента и скольжения еще более возрастают. Максимальный момент увеличивается по сравнению с режимом I×r-компенсации более чем в 2 раза. Перегрузочная способность по сравнению с естественным режимом возрастает приблизительно в 5 раз. Поэтому в электроприводах, где требуется обеспечить широкую статическую и динамическую устойчивость, закон Y0 = const наиболее эффективен.
Но существуют ограничения по применению данного закона. Компенсация падения напряжения в полных сопротивлениях статора требует повышения U1 с возрастанием нагрузки. Поэтому в верхнем диапазоне частот при больших моментах требуемое напряжение может оказаться нереализуемым посредством преобразователя частоты.
1.5. Закон постоянства полного потока ротора (Y2 = const)
Если путем регулирования напряжения компенсировать падение напряжения в полных первичных сопротивлениях схемы замещения и вторичном сопротивлении рассеяния ротора по условию
 ,
,
то получим режим частотного управления, при котором момент двигателя не имеет максимума и растет неограниченно с ростом скольжения b [5].
Но есть существенные ограничения по этому закону:
1) при больших a близких к aном закон Y2 = const может оказаться нереализуемым из-за большой величины напряжения U1.
2) При больших b из-за роста Y0 неизбежно наступает насыщение (режим Y2 = const осуществим при b < 3×bном).
На рис. 1 приведен пример механических характеристик асинхронного двигателя при различных законах управления.
Рис. 1. Механические характеристики двигателя при частотном управлении
2. Домашнее задание
Повторить основные принципы частотного управления асинхронным двигателем. Изучить законы частотного регулирования:
– "номинальный" закон;
– законы частотного регулирования с постоянством максимального момента;
– закон постоянства полного потока ротора.
3. Порядок работы
3.1. Введите параметры схемы замещения в окне задания параметров двигателя программы Rejim. Тип двигателя задается преподавателем.
3.2. Выполните расчет режима частотного регулирования U/f = const ("номинальный" закон). Значения частоты и абсолютного скольжения задаются преподавателем.
Снимите механические характеристики двигателя М(β) и зависимость тока статора I1(α) для заданных частот f1. Посмотрите и проанализируйте зависимость потоков двигателя от относительной частоты (Пси1отн.(α), Пси2отн.(α), Пси0отн.(α)).
Путем подбора частоты f1 определить диапазон регулирования, полагая момент сопротивления нагрузки постоянным. Величина момента сопротивления нагрузки задается преподавателем.
3.3. Рассмотрите закон частотного регулирования W1 = const (закон I∙r-компенсации). Значения частоты и абсолютного скольжения принять из п. 3.2.
Снимите механические характеристики двигателя М(β), n2(М), зависимость тока статора I1(α). Сравните данные характеристики с полученными в п. 3.2.
3.4. Повторите действия п. 3.3 для остальных законов частотного регулирования, представленных в программе.
4. Контрольные вопросы
4.1. Причины уменьшения максимального момента при использовании закона частотного управления U/f = const.
4.2. Основные особенности законов Ψ1 = const, Ψ0 = const.
4.3. Основные особенности закона Ψ2 = const.
4.4. Области практического применения закона U/f = const.
4.5. Области практического применения законов Ψ1 = const, Ψ0 = const.
5. Содержание отчета
5.1. Цель работы.
5.2. Схема замещения двигателя при переменной частоте.
5.3. Графики зависимостей, полученные в ходе работы.
Приложение
Руководство пользователя программы "Rejim"
1. Назначение программы
Приложение "Rejim" предназначено для расчета механических, электромеханических и рабочих характеристик номинального режима работы асинхронного двигателя (АД) и исследования законов частотного регулирования:
Y1= const;
Y2= const;
Y0= const;
U/f = const.
2. Функциональные и технические возможности
Для решения целевой задачи программа предоставляет пользователю следующие функциональные возможности:
- ввод исходных данных;
- просмотр введенных данных;
- сохранение введенных данных;
- расчет номинального режима;
- расчет режима частотного регулирования Y1= const;
- расчет режима частотного регулирования Y2= const;
- расчет режима частотного регулирования Y0= const;
- расчет режима частотного регулирования U/f = const;
- просмотр и печать результатов расчетов;
- вызов помощи.
3. Принципы работы с программой
3.1 Общие принципы. Начало работы
Рабочее поле программы Rejim представлено на рис. п. 1.1. Для того чтобы начать необходимые вам вычисления, нужно ввести входные параметры. Это можно сделать следующими способами:
- загрузить из файла;
- ввести новые параметры.
После того, как входные параметры введены, меню "Расчеты" становится доступным и можно вести расчеты режимов. Для этого достаточно выбрать соответствующий пункт в меню "Расчеты".
В заголовке главной формы приложения указывается файл параметров, с которым вы сейчас работаете. Ряд действий (к примеру, сохранить, загрузить файл) можно осуществлять, используя панель инструментов, нажимая соответствующую кнопку (обращайте внимание на всплывающие подсказки).
На графиках вверху указано имя функции, и от какой переменной зависимость нарисована. Вертикальная ось соответствует значению функции, а горизонтальная – значению переменной. Справа от графика помечено, какое значение параметра (к примеру, частота f1) соответствует цвету линии графика ("легенда"). На некоторых графиках имеется красная пунктирная линия, она показывает номинальные значения функции и переменной, что и отмечено в "легенде".
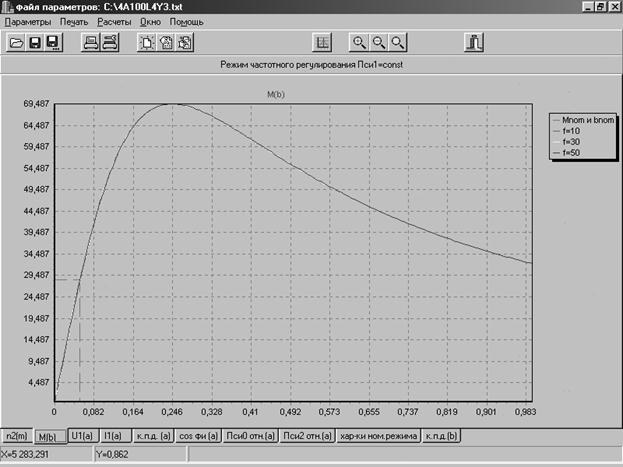
Рис. п. 1.1. Рабочее поле программы "Rejim"
3.2 Меню "Параметры"
Меню "Параметры" содержит следующие команды для работы с входными параметрами:
- Посмотреть – обзор текущих входных параметров;
- Изменить – изменение текущих параметров;
- Ввести новые – создается и заполняется новый файл параметров;
- Загрузить – загрузка ранее сохраненного файла параметров;
- Сохранить – сохранение текущих параметров в файл с текущим именем;
- Сохранить Как – сохранение текущих параметров в файл с указанным именем;
- Выход – завершение работы с приложением и выход в Windows.
3.3 Меню "Печать"
Данное меню содержит следующие команды для работы с принтером:
- Установки принтера – задание параметров принтера;
- Печать графика – вывод на печать активного графика, график печатается на весь лист.
3.4 Меню "Расчеты"
Выбор любого пункта в меню "Расчеты" приводит к началу выполнения указанного типа вычислений. Результаты расчетов выводятся в виде графиков и возможно текстовой информации. Рассмотрим команды меню подробнее.
- Номинальный режим – расчет характеристик номинального режима и вывод графиков. После выбора этого пункта вам дополнительно будет предложено указать те зависимости (функции), которые вы бы хотели увидеть, кроме стандартных графиков. Определившись и отметив интересующие функции, нажимайте кнопку "продолжить>>" для вывода результатов расчетов, которые располагаются на нескольких страницах. Переключение между страницами осуществляется при помощи мыши.
- Режим частотного регулирования W1=const – расчет режима частотного регулирования Y1=const. После выбора этого пункта вам дополнительно будет предложено указать значения частот f1 (рис. п. 1.2) и значения абсолютного скольжения b, каждый раз сделав свой выбор, нажимайте кнопку "продолжить расчет>>". Если нужного значения нет в предложенном списке, то его можно будет добавить (см. пункт 3.7). Для быстрого выбора всех значений, нажимайте кнопку "выделить все".
- Режим частотного регулирования W0=const – расчет режима частотного регулирования Y0=const. Действия, аналогичные предыдущему пункту.
- Режим частотного регулирования W2=const – расчет режима частотного регулирования Y2=const. Действия, аналогичные предыдущему пункту.
- Режим частотного регулирования U/f=const – расчет режима частотного регулирования U/f=const. Действия, аналогичные предыдущему пункту.
Рис. п. 1.2. Окно выбора значений частоты
3.5 Меню "Окно"
Меню "Окно" содержит команды, связанные с изображением графиков:
- Показывать координаты – когда эта опция отмечена галочкой, то в левом нижнем углу формы выводятся координаты точки на графике, на которую указывает курсор.
- Увеличить масштаб – увеличение масштаба активного графика. Если вы хотите увеличить часть графика, то это можно сделать, выделив прямоугольником интересующую вас область на графике мышью, для этого надо установить курсор в левый верхний угол прямоугольника, нажать левую кнопку мыши и удерживая её перевести курсор в нижний правый угол области.
- Уменьшить масштаб – уменьшение масштаба активного графика.
- Восстановить исходный вид графика – восстановление исходного масштаба активного графика. Это же происходит, когда выделяется прямоугольник на графике, начиная с нижнего правого угла.
3.6 Меню "Помощь"
Меню "Помощь" содержит команды связанные с изображением графиков:
- Команда "Содержание" (горячая клавиша "F1") служит для вызова помощи.
- Команда "О программе" служит для просмотра информации о данной версии приложения.
3.7 Изменение и добавление новых значений в диалогах выбора
Если вы хотите изменить или добавить новые значения в диалоге выбора, нажмите кнопку "Изменить значения", тогда появится диалоговая форма. В левой части формы находится список старых значений, а в правой – новый, который вы будете создавать. Выделение значения в списке производится подведением курсора к этому значению и нажатием левой кнопки мыши, при этом выбранная строка меняет цвет (рис. п. 1.3).
Кнопки ">" и "<" перемещают выделенное значение из старого списка в новый и наоборот, соответственно.
Кнопки ">>" и "<<" перемещают все значения из старого списка в новый и наоборот, соответственно.
Кнопка "New" добавляет новое значение к новому списку.
Кнопка "Ok" – завершение формирования нового списка и сохранения его.
Кнопка "Cancel" – отмена изменений старого списка и возвращение к его исходному виду.
Количество вводимых значений не должно превышать 8 – 10 в связи с ограниченным размером окна выбора значений (см. рис. п. 1.2).
Рис. п. 1.3. Окно изменения списка значений частоты
Руководство пользователя программы "Model"
1. Назначение программы
Приложение “Model” предназначено для расчета электромагнитных процессов в системе Преобразователь частоты (ПЧ) с широтно-импульсной модуляцией (ШИМ) – асинхронный двигатель (АД) для следующих режимов частотного регулирования:
Y1= const;
Y2= const;
Y0= const;
Мю заданное;
альфа = 180.
В первых четырех режимах напряжение на выходе АИН представляет собой однополярную ШИМ по синусоидальному закону.
2. Функциональные и технические возможности
Программа предоставляет пользователю следующие функциональные возможности:
- ввод исходных данных;
- просмотр введенных данных;
- сохранение введенных данных;
- расчет режимов приведенных в п.1;
- просмотр и печать результатов расчетов;
- вызов помощи.
Рабочее поле программы "Model" представлено на рис. п. 1.4.
3. Принципы работы с программой
3.1. Общие принципы. Начало работы (см. Руководство пользователя программы Rejim);
3.2. Меню "Параметры" (см. Руководство пользователя программы Rejim);
3.3. Меню "Печать" (см. Руководство пользователя программы Rejim).
3.4 Меню "Расчеты"
Меню содержит следующие пункты:
1. Моделирование системы ПЧ с ШИМ – АД. После выбора этого пункта появится окно списка режимов частотного регулирования, для которых можно выполнить расчет:
Y1= const;
Y2= const;
Y0= const;
Мю заданное;
альфа = 180.
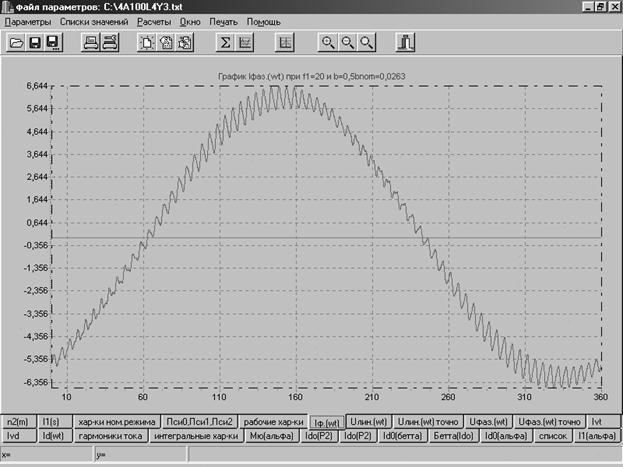
Рис. п. 1.4. Рабочее поле программы "Model"
Отметив интересующий режим, нажмите кнопку "Далее>>". Далее вам будет предложено указать значения частот f1 и значения абсолютного скольжения b, каждый раз сделав свой выбор, нажимайте кнопку "продолжить расчет>>". Если нужного значения нет в предложенном списке, то его можно будет добавить, используя меню "Списки значений" (см. ниже). В данном пункте производятся расчеты и вывод графиков следующих зависимостей:
Iфаз(wt) – зависимость фазного тока двигателя от времени;
Uлин(wt) – зависимость линейного напряжения от времени (построенная по гармоникам);
Uлин(wt)точно – зависимость линейного напряжения от времени;
Uфаз(wt) – зависимость фазного напряжения от времени (построенная по гармоникам);
Uфаз(wt)точно – зависимость фазного напряжения от времени;
Ivt – зависимость тока, протекающего через транзистор инвертора от времени;
Ivd – зависимость тока, протекающего через диод инвертора от времени;
Id(wt) – зависимость тока в звене постоянного тока от времени;
Гармоники тока – график относительных значений гармоник фазного тока;
Характеристики номинального режима (аналогично программе Rejim) и интегральные характеристики.
2. Построение зависимостей. В этом пункте производится расчет и вывод графиков следующих зависимостей:
Мю(альфа) – зависимость скважности от относительной частоты при различных b (бетта);
Ido(P2) – зависимость постоянной составляющей тока Id в зависимости от мощности на валу двигателя при различных b (бетта);
Ido(P2) – зависимость постоянной составляющей тока Id в зависимости от мощности на валу двигателя при различных a (альфа);
Ido(бетта) – зависимость постоянной составляющей тока Id от абсолютного скольжения b при различных a (альфа);
Бетта(Ido) – зависимость абсолютного скольжения b от постоянной составляющей тока Id при различных a (альфа);
Ido(альфа) – зависимость постоянной составляющей тока Id от относительной частоты a (альфа) при различных b (бетта);
I1(альфа) – зависимость действующего значения фазного тока Iфаз от относительной частоты a (альфа) при различных b (бетта);
Характеристики номинального режима.
После выбора данного пункта появится окно списка режимов частотного регулирования:
Y1= const;
Y2= const;
Y0= const;
Мю заданное;
альфа = 180.
Выполнить расчет можно для законов Y1= const, Y2= const, Y0= const. После выбора интересующего закона (действия, аналогичные предыдущему пункту) программа производит расчет характеристик в четырех режимах работы двигателя, предлагая пользователю каждый раз выбрать значения частоты f1 и абсолютного скольжения b (выполняйте действия, аналогичные предыдущему пункту).
3.5 Меню "Окно" (см. Руководство пользователя программы Rejim)
3.6 Меню "Помощь" (см. Руководство пользователя программы Rejim)
3.7 Меню "Списки значений"
Данное меню содержит два пункта изменения списков значений:
- частоты f1;
- абсолютного скольжения b.
См. п. 3.7 руководства пользователя программы Rejim.
СПИСОК ЛИТЕРАТУРЫ
1. Брускин Д. Э., Зорохович А. Е., Хвостов В. С. Электрические машины:– М.: Высш. шк., 1987. Ч. 1: Учеб. для электротехн. спец. вузов. – 319 с.
2. Справочник по электрическим машинам: / Под общ. ред. И. П. Копылова и Б. К. Клокова.– М.: Энергоатомиздат, 1988. Т 1. – 456 с.
3. Асинхронные двигатели серии 4А: Справочник. – М., 1982. – 504 с.
4. Булгаков А. А. Частотное управление асинхронными двигателями. – 3-е перераб. изд. – М.: Энергоиздат, 1982. – 216 с.
5. Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. – 654 с.
СОДЕРЖАНИЕ
Лабораторная работа № 1 "Исследование характеристик асинхронного двигателя в номинальном режиме работы" ……………………………………………………. 3
Лабораторная работа № 2 " Исследование электромагнитных процессов в системе преобразователь частоты – асинхронный двигатель" …………………………. 5
Лабораторная работа № 3 " Исследование характеристик асинхронного двигателя при различных законах частотного управления" ……………………………... 12
Приложение. Руководство пользователя программы "Rejim" …………………... 17
Руководство пользователя программы "Model" ………………….. 22
Список литературы …….. …………… ………………………………………….... 25
Редактор В. А. Маркалева
ИД № 06039 от 12. 10. 2001 г.
Подписано в печать 28. 08. 02. Формат 60х84/16. Отпечатано на дупликаторе. Бумага офсетная. Усл. печ. л. 1,75. Уч.-изд. л. 1,75. Тираж экз. Заказ
Издательство ОмГТУ. 644050, г. Омск, пр. Мира, 11
Типография ОмГТУ
| <== предыдущая | | | следующая ==> |
| | | Основные характеристики электростатического поля и его графическое изображение |
Date: 2015-05-08; view: 433; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |