Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Обзор существующих работ по групповой робототехнике
В настоящее время существует ряд систем, реализующих коллективное поведение:
- I-SWARM
Фундаментальным результатом проекта является рой микророботов (Рис. 1), который способен к выполнять задачи, которые не могут быть выполнены единственным микророботом, ни их небольшой группой. Результат - реализация заметного эффекта самоорганизации роботов, подобному такому, который замечен в таких экологических системах, как как муравей, колонии пчел, или других общественных насекомых. Есть много потенциальных выгод такой системы включая большую гибкость и адаптируемость системы к окружающей среде, надежности к неудачам, и т.д. Кроме того их коллективное поведение открывает новые прикладные области, которые не могут быть решены, используя сегодняшние инструменты. Отдельные агенты в состоянии общаться друг с другом, и таким образом, это позволяет им создавать эффект роя. [4]

Рис. 1. Робот проекта I-Swarm
- SwarmBot
Главная научная цель проекта состоит в том, чтобы изучить новый подход к разработке и реализации самоорганизации и самосборки роботов (Рис. 2). Этот подход берет свои теоретические корни в недавних исследованиях способностей самоорганизации, наблюдаемые у некоторых общественных насекомых.
Задача самоорганизации и самосборки является классической задачей “поиска и спасения” в сложной окружающей среде. Группа до 35 роботов должна транспортировать тяжелый объект от своей начальной локации до места назначения. Есть несколько возможных путей движения до цели, и эти пути могут иметь различные длины и могут потребовать ухода от возникающих препятствий. Вес объекта таков, что его транспортировка требует координационного усилия, по крайней мере нескольких роботов. Полный сценарий может быть расколот на две главных задачи: нахождение объекта или местоположения цели, и совместного транспортирования. [5]

Рис. 2.Сборка двух роботов проекта SwarmBot
.
· Centibots
Данный проект нацелен на развитие новой технологии, которая способна поддерживать скоординированные действия 100 роботов (Рис. 3) для таких миссий, как городское наблюдение. Первая команда роботов изучает область, строя ее карту. Затем вторая команда роботов старается найти интересующий предмет, осуществляет наблюдение и передает информацию друг другу. Если один робот терпит неудачу, другой начинает выполнять его задачу. [8]

Рис. 3.Группа роботов проекта Centibots
· SwarmRobot
Главная цель этого проекта состоит в том, чтобы создать дешевый, надежный и способный к самоорганизации микроробот (Рис. 4), который может быть легко воспроизведен даже дома. Этот робот может позволить строить крупномасштабную систему в 100 и более роботов, чтобы исследовать искусственную самоорганизацию, явления на стадии становления, контроль в многочисленных автоматизированных группах и так далее. Данный проект исследует основные принципы обработки информации и знаний, и проектирования и разработки очень ограниченных автономных систем. [7]

Рис. 4.Роботы проекта SmarmRobot
· Swarmanoid
Данный проект является преемником проекта SwarmBot и основывается на его результатах.
Главная научная цель этой работы - создание, внедрение и контроль распределенной автоматизированной системы. Данная система составлена из гетерогенных, динамически связанных, маленьких автономных роботов (Рис. 5). Коллективно, формируют коллектив, приблизительно из 60 роботов, которые делятся на три разных типа: роботы-разведчики, роботы-эффекторы и роботы-транспортировщики. Данная система, с помощью коллективных действий роботов, способна найти необходимый предмет, произвести с ним некоторые манипуляции (например, достать с полки) и доставить предмет в необходимое место. [9]

Рис. 5.Роботы транспортировщики и робот-рука
.
· IRobotSwarm
Проект представляет собой группу роботов (Рис. 6), способных координироваться для выполнения некоторых задач. Ожидается, что в перспективе небольшие роботы SwarmBot смогут объединяться в группы численностью до десяти тысяч и выполнять такие задачи, как, например, поиск мин, исследование неизвестных территорий (в том числе на других планетах), обнаружение вредных веществ и пр. Существующий в настоящее время образец SwarmBot имеет форму куба с длиной ребра около 12,5 см и построен на базе 32-разрядного микропроцессора. Для навигации в пространстве и взаимодействия с другими роботами применяются инфракрасные датчики. В качестве программной платформы используется специализированная операционная система SwarmOS. [6]

Рис. 6.Группа роботов проекта IRobotSwarm
.
· GraspLab
Проект создан Пенсильванским Университетом и представляет собой группу в 20 квадрокоптеров (Рис. 7), которые способны создавать заложенные формации в полете (например, спираль или квадрат). Кроме того, роботы способны совместно облетать препятствия и передавать друг другу данные. Самым интересным моментов в работе является то, что большой коллектив квадрокоптеров способен разделяться на более мелкие группы и выполнять различные задачи, обмениваясь при этом данными между коллективами. [2]

Рис. 7.Полет квадрокоптеров в формации “квадрат”
· Eporo
Разработка компании Nissan представляет собой роботизированный автомобиль EPORO или тестовый робот (Рис. 8) с применением технологии, которая позволяет ему двигаться в потоке, имитируя поведенческую модель косяка рыб, огибающей препятствия и избегающей столкновений друг с другом. Обмениваясь информацией об окружающей обстановке с другими участниками движения, несколько EPORO могут безопасно перемещаться вместе, при необходимости изменяя конфигурацию группы. [10]

Рис. 8.Разновидность роботов Eporo, имитирующих движение в стае рыб
· Робофутбол
В настоящий момент одно из самых популярных направлений в спортивной робототехнике, как в России, так и за рубежом, реализующее некоторые принципы группового поведения роботов. [11] Действительно, футбол – это командная игра, что предусматривает некоторые коллективные действия. На данный момент в робофутболе (Рис. 9), существует два подхода к созданию коллективов, но задача согласованного движения в них решается одинаково:
1. Виртуальная имитация. Существует программный агент, позволяющий имитировать согласование действий коллектива.
2. Реальный коллектив. Агенты получают команды с единого управляющего центра (сервера).
Исходя из этого становится понятно, что не смотря на наличие коллектива роботов, задача реализации их взаимодействия в робофутболе не подходит под определение коллективного взаимодействия, так как действия всех роботов определяет одна общая программа.
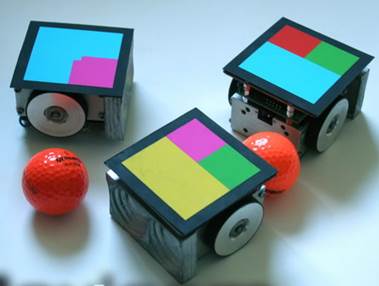
Рис. 9.Роботы-футболисты
Таким образом, можно сказать, что групповая робототехника и роевой интеллект представляют большой интерес для исследований по всему миру. Однако, для создания сложной системы, состоящей из простых составляющих необходимо решить целый ряд специфических проблем, характерных для коллективной работы роботов. Среди них можно отметить такие, как [1]:
1. Непредсказуемая динамика внешней среды вплоть до сознательного противодействия.
2. Неполнота и противоречивость знаний роботов (агентов) о состоянии внешней среды и о других участниках.
3. Многообразие вариантов путей достижения цели, структур коллектива, распределения ролей и т.д.
4. Распределенный и динамический характер планирования действий коллектива.
5. Проблемы, связанные с тем, что коллектив представляет собой совокупность физических объектов, действующих в реальной сложной среде (проблемы надежной коммуникации, распределенность коллектива в пространстве и т.д.).
6. Прочие технические проблемы (архитектура сети, протоколы, операционные средства и т.д.).
Как указано в [1], решение данных проблем позволит создать такие системы, которые будут обладать рядом особенностей, например, такими как:
· Высокая надежность системы (утрата части членов коллектива не влияет на работоспособность всей системы в целом).
· Гибкость системы (способность системы к реконфигурации).
· Потенциальная возможность развития и усложнения решаемых задач путем наращивания мощности коллектива.
· Относительная простота конструкции рядового члена коллектива.
Появление систем с такими особенностями позволит решать большой круг задач [1]:
· Командная работа роботов, совместно выполняющих диагностику труднодоступных объектов,
· Мониторинг окружающей среды,
· Коллективное решение задач роботами–спасателями,
· Разведка и рекогносцировка (для беспилотных летательных аппаратов, роботов военного назначения),
· Охранные функции, патрулирование,
· И т.д.
В данной работе рассматриваются механизмы группового поведения роботов в рамках такого направления в робоспорте, как групповая борьба, которая берет свои основы из робосумо, и предлагается алгоритм, позволяющий каждому роботу выбирать наиболее оптимальную цель для атаки, учитывая дальнейшие действия роботов-союзников. Таким образом, достигается минимальный уровень кооперации команды и появляется возможность примитивных коллективных действий.
Важной особенностью является то, что единого центра принятия решений для всей команды не существует: каждый член коллектива самостоятельно оценивает обстановку и выбирает цель, после чего, при необходимости, производит коррекцию своих действий относительно действий других членов команды или выбирает более подходящую цель.
Очевидно, что существует целый ряд специфических проблем, характерных для коллективной работы роботов. Среди них можно отметить такие, как:
Таблица 1. Проблематика коллективного поведения роботов
| Проблема | Ее решение в работе |
| Непредсказуемая динамика внешней среды вплоть до сознательного противодействия | Внешняя среда (полигон) статична. |
| Неполнота и противоречивость знаний роботов (агентов) о состоянии внешней среды и о других участниках | Внешняя среда заранее известна агентам. Состояние других участников либо известно, либо оценивается по их поведению. |
| Многообразие вариантов путей достижения цели, структур коллектива, распределения ролей и т.д. | Агент выбирает наиболее подходящий путь решения задачи исходя из его оценки ситуации. |
| Распределенный и динамический характер планирования действий коллектива. | Решение данной проблемы – основная задача работы. |
| Проблемы, связанные с тем, что коллектив представляет собой совокупность физических объектов, действующих в реальной сложной среде (проблемы надежной коммуникации, распределенность коллектива в пространстве и проч.). | Внешняя среда ограничена размерами полигона, проблемами коммуникации на малом расстоянии можно с некоторыми допущениями пренебречь. |
| Прочие технические проблемы (архитектура сети, протоколы, операционные средства и т.д.). | Технические средства созданы с помощью хорошо известных комплектующих и программных комплексов. |
Кроме того, необходимо отметить, что на сегодняшний день существуют ряд подходов к созданию коллективов роботов:
1. Формальные модели коллективного поведения.
2. Технологии многоагентных систем.
3. Имитационное моделирование.
4. Роевые, пчелиные и муравьиные алгоритмы.
5. Эволюционные методы.
Все они подробно рассмотрены в работе [1].
Date: 2015-11-14; view: 1604; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |