Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Управление пневмодвигателями
В структуре управления пневмоприводом (рис. 4.17) устройство управления пневмодвигателем играет роль преобразователя сигналов управления, посылаемых человеком, каким-либо внешним устройством, или управляющим автоматом, в пневматический сигнал, необходимый для работы пневмодвигателя.
Сигналы управления могут быть разными по форме: в форме механического перемещения, в форме электрического тока, в форме импульса давления воздуха и т. д.
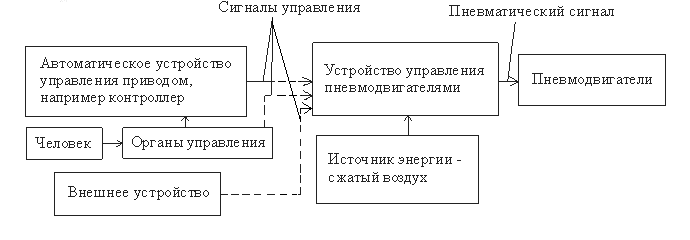
Рис. 4.17. Структура управления пневмоприводом
Сигналы управления также могут иметь разную энергию и мощность. Как правило, это сигналы малой энергии и мощности. Устройство управления двигателями может иметь разную логику управления. Эта логика реализуется электропневмоавтоматикой – сочетанием пневматических, механических, электрических и электронных устройств, соединенных определенным образом. Все вышеперечисленное определяет большое разнообразие схем и конструкций устройств управления пневмодвигателями, однако в подавляющем большинстве из них в качестве основных элементов присутствуют распределители воздуха и дроссели. Распределители, в соответствии с сигналами управления, перераспределяют (коммутируют) потоки воздуха в каналах пневмопривода. С помощью дросселей регулируют пропускную способность каналов.
Рассмотрим, в качестве примера фрагмент типового устройства управления двухсторонним пневматическим цилиндром (рис. 4.18). Устройство изображено в двух состояниях: состояние I – управляющий сигнал F выключен, состояние II – управляющий сигнал включен.
Распределитель 4 имеет на корпусе пять присоединительных отверстий (5 портов, ходов, линий). Отверстие P – входное для сжатого воздуха. Отверстие A – выходное, нормально открытое. В исходном состоянии, когда нет управляющего сигнала, оно открыто для входящего в распределитель сжатого воздуха. Отверстие В – выходное, нормально закрытое для входящего воздуха. Отверстие R 1 – отверстие выхлопа, нормально открытое для выходящего воздуха. Отверстие R 2 – отверстие выхлопа, нормально закрытое для выходящего воздуха.
Отверстиями А и В распределитель через устройства 2 и 3 соединяется с пневмоцилиндром. Через отверстие Р в распределитель поступает сжатый воздух от источника сжатого воздуха. Отверстия R 1 и R 2 соединяются с атмосферой.
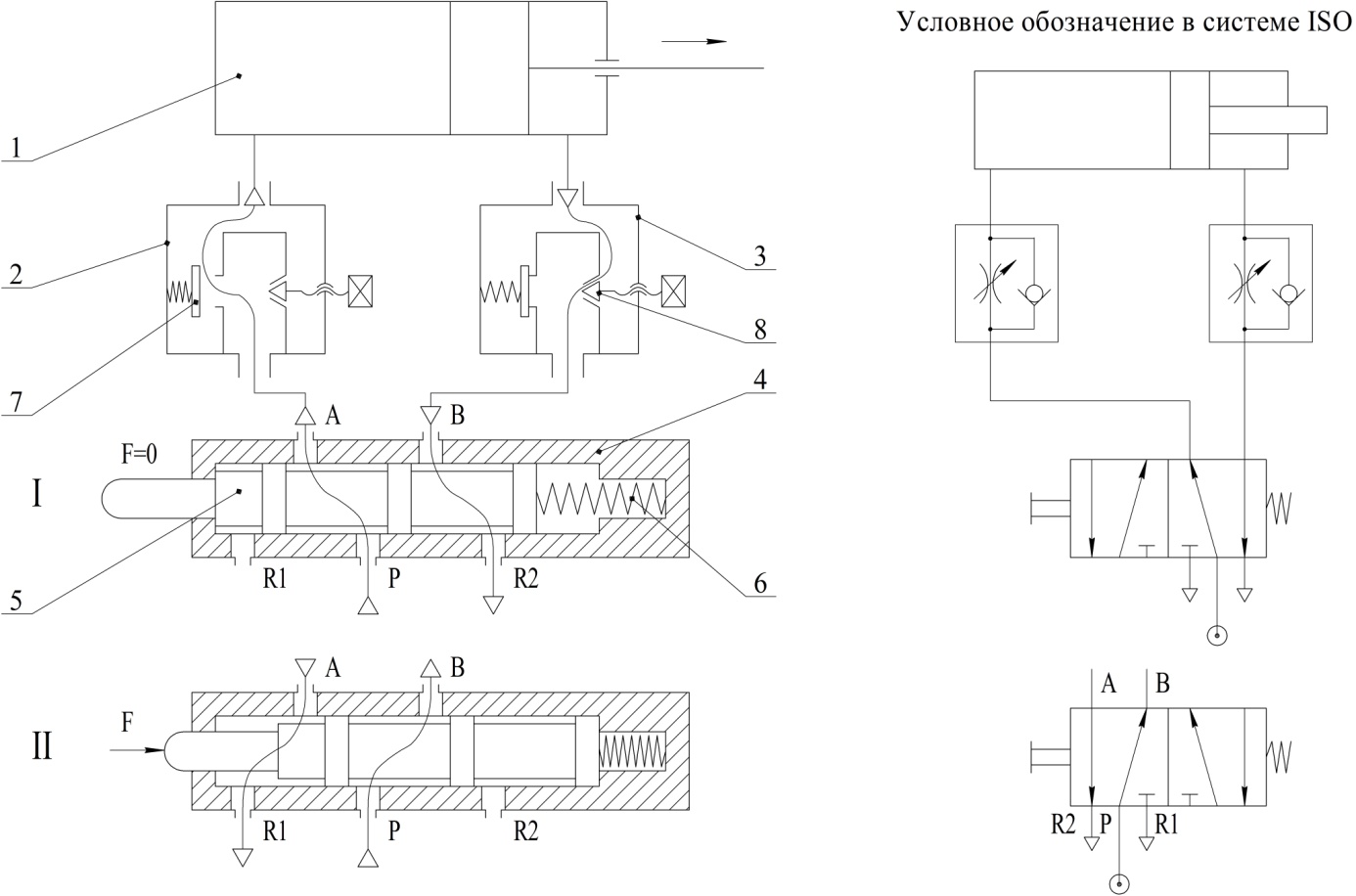
Рис. 4.18. Устройство управления двухсторонним
пневматическим цилиндром:
1 – двухсторонний пневматический цилиндр; 2, 3 – дроссели с обратным клапаном - добавить поток; 4 – распределитель золотникового типа; 5,6,7
Внутри корпуса находится золотник (переключатель) 5. Золотник представляет из себя цилиндр с канавками и элементами уплотнений (на рисунке не показаны). В исходном состоянии I золотник пружиной 6 переведен в крайнее левое положение. Воздух через отверстие Р и канавку в золотнике проходит в отверстие А, затем входит в устройство 2 – дроссель с обратным клапаном. Здесь сжатый воздух, преодолевая усилие пружины, открывает клапан 7 и свободно проходит в левую полость цилиндра 1, поршень цилиндра движется вправо. При этом воздух из правой полости цилиндра вытесняется поршнем в устройство 3. Здесь воздух вынужден проходить через узкую щель между иглой и седлом дросселя 8. Регулируя величину щели, можно изменять пропускную способность дросселя и расход воздуха через него. Пропорционально расходу будет меняться скорость движения поршня цилиндра, т. е. фактически дроссель выполняет функцию регулятора скорости пневмоцилиндра. Пройдя дроссель, воздух попадает в отверстие В распределителя и далее через канавку в золотнике и отверстие R 1 свободно выходит в атмосферу. Для уменьшения шума на выходе воздуха из распределителя часто ставят глушитель (на рис. не показан).
В состоянии II с помощью управляющей силы F преодолевается усилие пружины 6, и золотник переводится в крайнее правое положение. Золотник переключает (коммутирует) потоки воздуха, как изображено на рисунке, в результате чего поршень цилиндра движется влево, а скорость движения регулируется дросселем устройства 2.
На пневматических схемах рассмотренное устройство управления изображается так, как показано на рисунке справа. Распределитель пятиходовой двухпозиционный (обозначается как распределитель 5/2 – 5 ходов-портов, 2 положения).
При выключении сигнала управления золотник всегда занимает определенное положение, в данном случае – крайнее левое положение; такой распределитель называют моностабильным. Управляющий сигнал в виде силы F прикладывается непосредственно к золотнику, т. е. данный распределитель имеет так называемое «прямое» управление. Сила F может создаваться рукой человека или каким-нибудь приводом – рычагом, толкателем, кулачком, штоком другого пневмоцилиндра и т. д. Часто в качестве привода используют электромагнит (рис. 4.19).

Рис. 4.19. Электромагнит, управляющий золотником:
1 – сердечник электромагнита; 2 – катушка; 3 – магнитопровод;
4 – распределитель
В этом случае управляющий сигнал, в виде импульса постоянного тока, поступает на катушку электромагнита. Электромагнит срабатывает и перемещает золотник. Для перемещения золотника требуется относительно большой ток. Поэтому, если управляющий сигнал вырабатывает контролер, то между контролером и электромагнитом включают усилитель постоянного тока.
В современной пневмоавтоматике усилитель управляющего сигнала в виде малогабаритного пилотного распределителя клапанного типа и управляющего пневмоцилиндра встраивают в основной распределитель (рис. 4.20). На рисунке распределитель изображен в состоянии, когда нет управляющего сигнала.

| 
|
Рис. 4.20. Распределитель с пилотным управлением:
1 – электромагнит малой мощности; 2 – шток электромагнита; 3 – клапан;
4 – канал подачи сжатого воздуха; 5 – канал питания управляющего пневмоцилиндра; 6 – поршень управляющего пневмоцилиндра;
7 – золотник основного распределителя
На катушку малогабаритного электромагнита 1 непосредственно от контроллера подается управляющий импульс тока. Шток 2 электромагнита, перемещаясь вправо, открывает клапан 3, и воздух под давлением от порта Р по каналам 4 и 5 поступает в левую полость пневмоцилиндра управления. Поршень 6 перемещается вправо и перемещает золотник 7 основного распределителя. Таким образом, сила F определяется давлением сжатого воздуха и площадью поршня 6 и многократно превосходит силу, развиваемую электромагнитом. Так реализуется так называемое пилотное «непрямое» управление.
Date: 2015-09-24; view: 957; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |