Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ШИМ в качестве ВИЭП
Рассмотренные выше вторичные источники питания для электромеханических систем, энергию торможения исполнительного двигателя рассеивают в активных сопротивлениях. Кроме того, такие источники питания потребляют из сети реактивную мощность. В системах маломощных (приблизительно до 500 Вт) отмеченные особенности обычно не приводят к существенным ухудшениям энергетических характеристик. В случае систем большей мощности с этими особенностями приходиться считаться. Универсальное решение для обеспечения всех режимов работы исполнительной машины и улучшения энергетических характеристик систем реализуется путем использования сетевого инвертора. Основным достоинством сетевого инвертора в системе мехатроники является способность рекуперировать механическую энергию в сеть переменного тока.
Функциональная схема сетевого инвертора с синусоидальной ШИМпоказана на рис.4.6.. Сам инвертор представляется преобразователем, который по отношению к сети переменного тока генерирует эдс, первая гармоника этой эдс равна
 ,
,
где  -коэффициент модуляции,
-коэффициент модуляции,  -фаза напряжения модуляции по отношению к напряжению сети.
-фаза напряжения модуляции по отношению к напряжению сети.
Уравнение, составленное по второму закону Кирхгоффа для схемы (рис.4.6) запишется в виде
 ,
,
где  ,
,  ,
,  - результирующие векторы эдс на выходе инвертора, напряжения сети и тока.
- результирующие векторы эдс на выходе инвертора, напряжения сети и тока.

Рис.4.6. Функциональная схема сетевого инвертора
Для подключения сетевого инверторана сеть необходимо соблюсти ряд условий:
· частота модуляции инвертора должна в точности совпадать с частотой сети f1,
· очередность фаз управления инвертором должна совпадать с очередностью фаз сети,
· в каждой фазе инвертора со стороны сети должна быть включена значительная индуктивность, такая, чтобы реактивное сопротивление этой индуктивности на порядок и более превышало сумму внутренних сопротивлений сети и инвертора.
По отношению к сети переменного тока сетевой инвертор может работать и как генератор (инвертор ведомый сетью), и как потребитель активной мощности (активный управляемый выпрямитель). При этом активная мощность определяется уравнением
 ,
,
где  , L-индуктивность на входе инвертора, m1 –число фаз.
, L-индуктивность на входе инвертора, m1 –число фаз.
Из уравнения для мощности следует, что при  инвертор генерирует в сеть активную мощность. При
инвертор генерирует в сеть активную мощность. При  инвертор потребляет из сети активную мощность. При
инвертор потребляет из сети активную мощность. При  вся система работает в режиме холостого хода.
вся система работает в режиме холостого хода.
Реактивная мощность, потребляемая инвертором, определяется уравнением

В зависимости от знака инвертор может потреблять реактивную (индуктивную), или реактивную (емкостную) мощность. Рассмотрим этот вопрос подробнее.
В режиме холостого хода инвертор не генерирует и не потребляет активной мощности. Реактивная мощность в режиме холостого хода равна

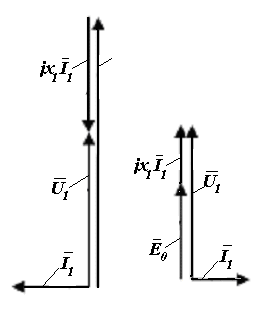
Рис.4.7 Векторная диаграмма системы инвертор-сеть в режиме холостого хода
Любое изменение коэффициента модуляции и, связанной с ним эдс  , приводит к появлению тока в источнике. Физику процессов рассмотрим с использованием векторных диаграмм (рис.4.7).
, приводит к появлению тока в источнике. Физику процессов рассмотрим с использованием векторных диаграмм (рис.4.7).
Поскольку в сети напряжение  постоянно, то увеличение по сравнению с приводит к появлению емкостного тока в сети (рис.4.7). Уменьшение по сравнению с приводит к появлению индуктивного тока в цепи. Поскольку в обоих случаях угол между
постоянно, то увеличение по сравнению с приводит к появлению емкостного тока в сети (рис.4.7). Уменьшение по сравнению с приводит к появлению индуктивного тока в цепи. Поскольку в обоих случаях угол между  и
и  равен 0, то инвертор не отдает и не потребляет активной мощности. Таким образом, изменяя коэффициент модуляции, можно генерировать (или потреблять) реактивную мощность. Рассмотрим векторную диаграмму для общего случая, показанную на рис.4.8.
равен 0, то инвертор не отдает и не потребляет активной мощности. Таким образом, изменяя коэффициент модуляции, можно генерировать (или потреблять) реактивную мощность. Рассмотрим векторную диаграмму для общего случая, показанную на рис.4.8.
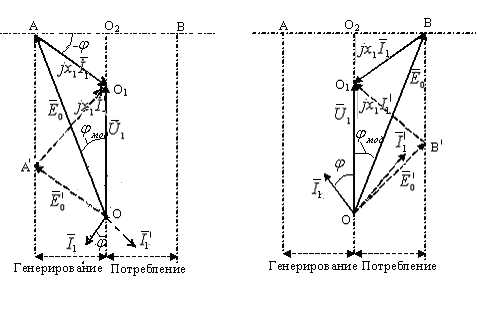
Рис.4.8 Векторная диаграмма системы инвертор-сеть в режиме нагрузки
Из векторной диаграммы следует
АO2 =  ,
,  =
=  .
.
Активная и реактивная мощность в системе определяются уравнениями
 ,
,  .
.
Сравнение уравнений, приведенных выше показывают, что при постоянном напряжении сети ( ), отрезок АO2 в определенном масштабе – есть активная мощность, а отрезок O1O2 – реактивная мощность.
), отрезок АO2 в определенном масштабе – есть активная мощность, а отрезок O1O2 – реактивная мощность.
Поэтому для изменения активной мощности при (Q1 =const) конец вектора  должен скользить по горизонтальной прямой (AB). Для изменения реактивной мощности при (Р1=const) конец вектора (
должен скользить по горизонтальной прямой (AB). Для изменения реактивной мощности при (Р1=const) конец вектора ( ) должен скользить по вертикальной прямой (AA1 или ВВ1). Положение вектора (ОО2) соответствует холостому ходу. Если вектор () находится слева от прямой (ОО2), то инвертор генерирует активную мощность в сеть. Если вектор () находится справа от прямой, то инвертор потребляет активную мощность из сети. В режиме генерирования (
) должен скользить по вертикальной прямой (AA1 или ВВ1). Положение вектора (ОО2) соответствует холостому ходу. Если вектор () находится слева от прямой (ОО2), то инвертор генерирует активную мощность в сеть. Если вектор () находится справа от прямой, то инвертор потребляет активную мощность из сети. В режиме генерирования ( ) при скольжении вектора вниз по вертикали, инвертор потребляет из сети реактивную (емкостную) мощность до тех пор, пока (
) при скольжении вектора вниз по вертикали, инвертор потребляет из сети реактивную (емкостную) мощность до тех пор, пока ( ). При (
). При ( пунктир, рис.4.8) инвертор потребляет из сети реактивную (индуктивную) мощность.
пунктир, рис.4.8) инвертор потребляет из сети реактивную (индуктивную) мощность.
В режиме потребления мощности ( ) из сети инвертор потребляет реактивную (емкостную) мощность до тех пор, пока (
) из сети инвертор потребляет реактивную (емкостную) мощность до тех пор, пока ( ) и реактивную (индуктивную) мощность при (
) и реактивную (индуктивную) мощность при ( ).
).
Все эти свойства инвертора при работе на сеть чрезвычайно полезны и часто используются (например, активные фильтры). Особенно важны эти свойства при построении электроприводов переменного тока с использованием синхронных и асинхронных машин, когда требуется рекуперация механической энергии в питающую сеть переменного тока. Перспективно также использование сетевых инверторов при построении асинхронных генераторов с короткозамкнутым и фазным ротором.
Преобразование координат.
Для описания электромагнитных процессов в системах переменного тока используются различные системы координат:
1. Неподвижные координаты, которые обозначаются через  , причем ось
, причем ось  совмещается с действительной осью комплексной плоскости, а ось
совмещается с действительной осью комплексной плоскости, а ось  - с мнимой.
- с мнимой.
2. Вращающиеся с произвольной скоростью координаты x, y (x - вещественная ось, y-мнимая ось).
При составлении математического описания и синтезе электромеханическх систем переменного тока преобразования координат реализуется аппаратным или программным способом в системе управления.
Рассмотрим это преобразование относительно координат, вращающихся с произвольной скоростью  относительно неподвижных координат.
относительно неподвижных координат.
Математическая основа преобразования координат поясняется на рис. 4.9.
В неподвижной системе координат 
 вектор тока может быть представлен в алгебраической и показательной форме
вектор тока может быть представлен в алгебраической и показательной форме
 .
.
Аналогично в системе вращающихся координат (x,y) тот же самый вектор может быть представлен в виде
 .
.
Откуда легко получить уравнения перехода от неподвижной системы координат к вращающейся  и наоборот:
и наоборот:




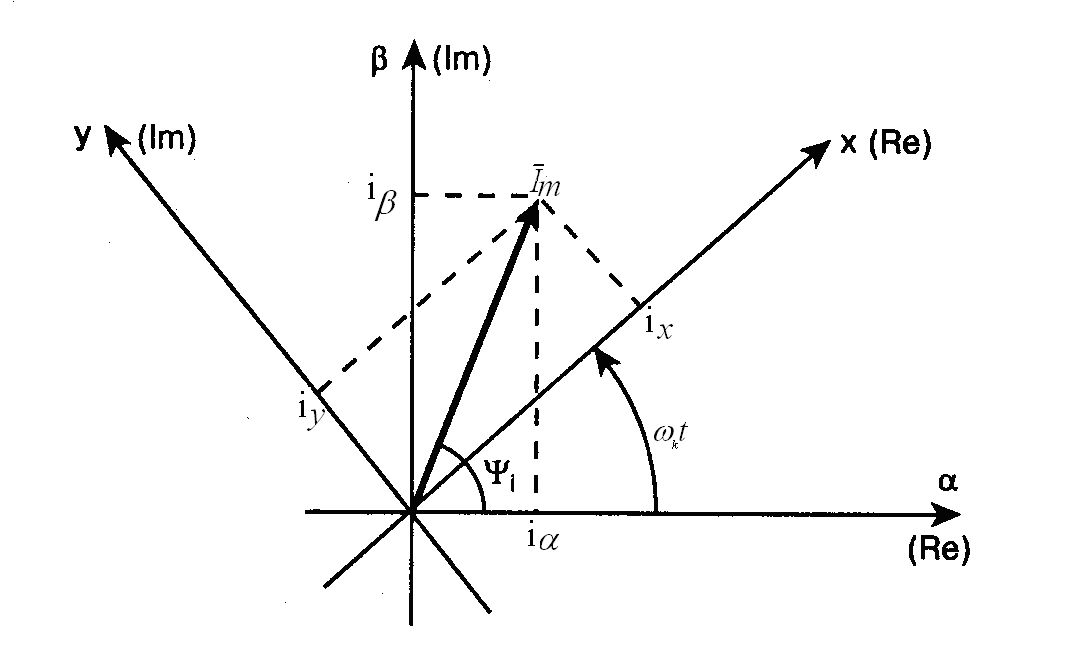 Рис.4.9. Преобразование координат в векторной системе управления.
Рис.4.9. Преобразование координат в векторной системе управления.
|
Преобразование двухфазной неподвижной системы координат к трехфазной осуществляется в соответствии с выражениями:

Литература
1. Горбачев Г.Н., Чаплыгин Е.Е. Промышленная электроника: Учебник для вузов. – М: Энергоатомиздат, 1988.-320 с.
1.
2.Забродин Ю.С. Промышленная электроника: Учебник для вузов - М:
Высшая школа, 1982. – 496
3.Шиллинг В. Тиристорная техника: Ленинград, Энергия, 1971 – 263 с.
4. Колонтаєвский Ю.П., Сосков А.Г. Промислова електроніка та схемотехніка:
теорія і практикум: Навч. посіб./ За ред. А.Г.Соскова 2-е вид. – К.:
Каравела, 2004. 432c
Date: 2015-09-22; view: 471; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |