Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Событийно-управляемые (гибридные) системы
Термин динамическая система первоначально отождествлялся с автономной системой обыкновенных дифференциальных уравнений. Позже он стал использоваться для обозначения все большего числа моделей, поведение которых зависит от времени. Среди динамических систем особое место занимают гибридные системы.
Рассмотрим несколько примеров.
Пример 1. Рассмотрим движение шарика массы m, брошенного с начальной скоростью V 0 под углом a к горизонтальной плоскости в плоско-параллельном поле тяготения. После броска шарик взлетит вверх, затем станет падать вниз, ударится о плоскость, отскочит, и снова полетит вверх. При отсутствии воздуха и абсолютно упругом ударе траектория шарика будет выглядеть следующим образом:
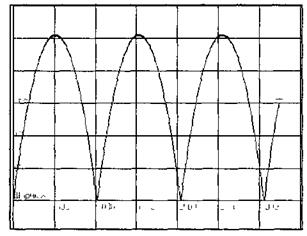
По вертикальной оси отложена высота полета, по горизонтальной – дальность. На рисунке видны две фазы: полет и отскок. В фазе полета поведение шарика описывается следующей системой уравнений:
 (4.2)
(4.2)
Здесь [x, y] – дальность и высота полета, [ Vx, Vy ] – вертикальная и горизонтальная составляющие скорости; g – ускорение силы тяжести.
Длительностью фазы отскока при достаточно больших значениях начальной скорости можно пренебречь по сравнению с длительностью фазы полета, и рассматривать отскок как мгновенное дискретное действие, результатом которого является изменение знака вертикальной составляющей скорости на противоположный. Момент отскока можно определить, если следить за выполнением неравенств y £ 0 и Vy < 0.
Таким образом, в некоторый момент времени t *, который определяется логическим предикатом (y £ 0) and (Vy < 0), полет заканчивается, шарик мгновенно меняет направление движения (Vy:= – Vy), и полет продолжается, но уже с новыми условиями.
Этот пример иллюстрирует самый простой вид гибридной системы, когда существует единый закон непрерывного поведения, но в некоторые моменты времени, в общем случае зависящие от значений времени и координат, часть фазовых переменных скачком меняет свои значения. Описание поведения таких систем включает в себя не только описание непрерывного действия, но и описание дискретных действий, указывающих когда наступают изменения и какие мгновенные действия следует выполнить.
Поведение гибридной системы можно рассматривать как “склейку” непрерывных поведений в виде кусочно-непрерывной функции.
Пример 2. Обрыв нити качающегося маятника. Рассмотрим маятник в виде шарика, подвешенного на нити длиной L. Предположим, что мы по команде Обрезать мгновенно перерезаем нить качающегося маятника. Колебательное движение маятника описывается следующей системой уравнений
где a – угол отклонения нити от вертикального положения; w – угловая скорость; g – ускорение силы тяжести; x – горизонтальная координата шарика; y – вертикальная координата шарика в прямоугольной системе координат, начальная точка которой совмещена с точкой подвеса.
Свободный полет шарика после перерезания нити описывается системой уравнений из примера 1. В данном примере в различных областях меняются правые части уравнений, описывающих движение, размерность и состав фазового вектора, и количество решаемых уравнений.
Гибридные или событийно-управляемые системы являются обобщением классических динамических систем, у которых в различных областях фазового пространства меняются уравнения, размерность и состав фазового вектора. Частные случаи таких систем достаточно хорошо изучены, однако даже они вызывают трудности при практическом моделировании.
Термин “гибридные системы” появился за рубежом и постепенно вытесняет ранее используемые в отечественной литературе названия “непрерывно-дискретные системы”, “агрегативные системы”. При описании гибридных систем приходится использовать как непрерывные модели, так и конечные автоматы, описывающие моменты наступления событий.
Обычно выделяют три типа гибридных систем:
· сохраняющие единое описание во всем пространстве и меняющие только начальные условия при переходе из области в область;
· меняющие значения параметров в правых частях уравнений в зависимости от наступающих событий;
· меняющие правые части и число уравнений в зависимости от наступающих событий.
Date: 2015-09-05; view: 528; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |