Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Структурные схемы с замкнутой цепью воздействия
 Управление с замкнутой цепью воздействия характеризуется тем, что значения требуемых показателей управляемого процесса(У) поддерживается с помощью обратной связи за счет подачи на УУ сигналов, определяемых действительным ходом процесса управления. Такие структурные схемы имеют следующие виды управления.
Управление с замкнутой цепью воздействия характеризуется тем, что значения требуемых показателей управляемого процесса(У) поддерживается с помощью обратной связи за счет подачи на УУ сигналов, определяемых действительным ходом процесса управления. Такие структурные схемы имеют следующие виды управления.
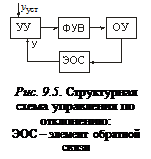
1. Управление по отклонению (рис. 9.5, 9.6).
Сигнал с ЭОС, характеризующий текущее состояние ОУ (У), подается на устройство управления, которое сравнивает его с параметром уставки УУ (Ууст.). На основании этого сравнения вырабатывается сигнал, пропорциональный разности (У – Ууст.). Далее этот сигнал преобразуется в формирователе управляющего воздействия (ФУВ) и передается на объект управления (ОУ) через исполнительное устройство, входящее в состав ФУВ. В такой системе управления влияние возмущающих воздействий не исключается, но ослабляется. Конечной целью такого вида управления является достижение равенства У = y уст.
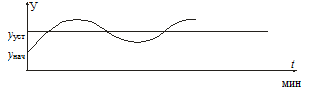
Рис. 9.6. Процесс управления по отклонению
2. Комбинированное управление (рис. 9.7, 9.8).
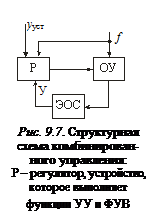 Эта система управления сочетает в себе преимущества управления по отклонению и по возмущению. Объединив функции устройства управления (УУ) и ФУВ в устройстве, которое называется «Регулятор», структурную схему комбинированного управления можно представить в виде, изображенном на рис. 9.7.
Эта система управления сочетает в себе преимущества управления по отклонению и по возмущению. Объединив функции устройства управления (УУ) и ФУВ в устройстве, которое называется «Регулятор», структурную схему комбинированного управления можно представить в виде, изображенном на рис. 9.7.
Эта система позволяет увеличить точность управления в сравнении с ранее рассмотренными системами управления.
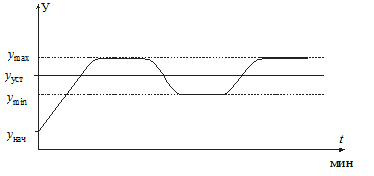
Рис. 9.8. Процесс комбинированного управления
3. Система следящего управления (следящая система) (рис. 9.9, 9.10).
Такие системы служат для «отслеживания» состояния объекта или контролируемой величины, например, механических перемещений. Целью такого управления является сведение к минимуму разности между входной и выходной величинами. Характерной особенностью таких систем является наличие исполнительных устройств непрерывного действия, что отличает этот вид управления от управления по отклонению при дискретных ИУ. Входным сигналом является разность между выходной и входной величинами. Этот сигнал называется сигналом рассогласования и формируется сумматором (рис.9.9)
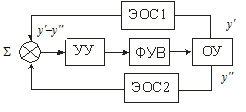
Рис. 9.9. Структурная схема следящей системы:
∑ – суммирующее устройство, УУ – устройство
управления, ФУВ – формирование управляющего
воздействия, ОУ – объект управления, ЭОС1,
ЭОС2 – элементы обратной связи
Сигнал рассогласования (y' – y") подается на УУ, где он преобразуется, усиливается и используется для формирования управляющего воздействия.
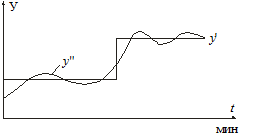
Рис. 9.10. Процесс работы следящей системы
Date: 2015-09-20; view: 444; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |