Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Параметры элементов с непрерывной характеристикой управления
1. Коэффициент преобразования (Кп).
Непрерывная характеристика (рис. 2.18) независимо от того, проходит она через «0» или нет, может быть представлена в виде простого уравнения
y = Кп x, (2.7)
где x, y – входной и выходной сигналы.
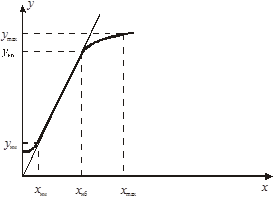
Рис. 2.18. Непрерывная характеристика
управления:
x нм, x нб – наименьшее и наибольшее значения входной
величины, соответствующие линейной части характери-
стики; y нм, y нб – значения выходной величины соответст-
вующие x нм и x нб
Значение Кп меняется в зависимости от величины x, т.е. Кп = f (x). Следовательно, уравнение (2.7) будет иметь вид
y = Кп(x) x. (2.8)
Обычно пользуются дифференциальным коэффициентом преобразования
Кп = lim  , при Δ x→ 0; Кп =
, при Δ x→ 0; Кп =  , (2.9)
, (2.9)
Физически Кп представляет собой тангенс угла наклона касательной к функции управления (рис. 2.19).
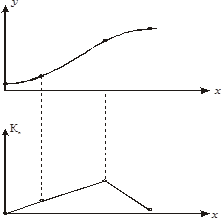
Рис. 2.19. Физический смысл Кп
Линейная характеристика имеет Кп = const. Для конкретных видов элементов Кп может называться по-другому, например: для усилителя – коэффициент усиления, для датчика – коэффициент чувствительности и т.д.
2. Коэффициент динамического диапазона Кд.
Кд =  , (2.9)
, (2.9)
где  ,
,  – наибольшее и наименьшее значения выходного сигнала (рис. 2.18).
– наибольшее и наименьшее значения выходного сигнала (рис. 2.18).
3. Коэффициент передачи мощности (К P).
К P =  , (2.10)
, (2.10)
где Δ Ру – изменение мощности выходного сигнала в ответ на изменения мощности входного Δ Рх.
4. Входное z вх и выходное z вых сопротивления (рис. 2.20).
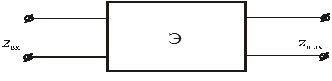
Рис. 2.20. Входное и выходное сопротивления элемента
5. Линейность или нелинейность характеристики управления.
6. Ширина зоны нечувствительности.
7. Ширина зоны (петли) неоднозначности.
8. Область (зона) насыщения.
9. Порог чувствительности (разрешающая способность).
10. Погрешность (ошибка) для характеристик с неоднозначностью (рис. 2.21).
Δ y п = 0,5 ( –
–  ). (2.11)
). (2.11)
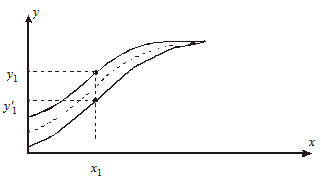
Рис. 2.21. Непрерывная характеристика управления
с петлей неоднозначности
На любой элемент могут действовать различные внешние факторы – возмущающие воздействия. В связи с этим выходной сигнал для элемента с непрерывной характеристикой управления может быть записан с учетом возмущающих воздействий:
y = f (x, f 1, f 2, …, fn), (2.12)
где f 1, f 2,…, fn – возмущающие воздействия; x – входной сигнал.
Изменения выходного сигнала под действием входного сигнала и возмущений можно записать, используя приращения:
 . (2.13)
. (2.13)
Введя обозначения парциальных коэффициентов преобразования
можно записать
 . (2.14)
. (2.14)
Вынося за скобки коэффициент преобразования входного сигнала К х получим
 (2.15)
(2.15)
Из (2.15) видно, что чем меньше значения парциальных коэффициентов: К f 1,…, К fn, тем меньше влияние на y соответствующих возмущающих воздействий.
2.3.2. Параметры элементов с релейной характеристикой
управления
1. Параметр срабатывания элемента (x ср).
Это есть величина входного сигнала, при достижении которой происходит резкое изменение выходного сигнала от y н до y к (рис. 2.22). Параметром может быть напряжение, ток, сопротивление и т.д.
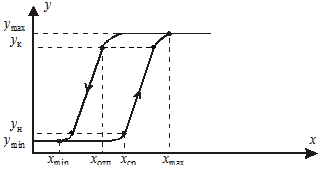
Рис. 2.22. Релейная характеристика управления:
y н, y к – начальное и конечное значения выходного сигнала; y min, y max – минимальное и максимальное возможные значения выходного сигнала; x отп и x ср – параметры
отпускания и срабатывания; x max и x min – максимальное
и минимальное допустимые значения входного сигнала
2. Параметр отпускания (x отп).
Это есть величина входного сигнала, при достижении которой происходит резкое изменение выходной величины от y к до y н (рис. 2.22).
3. Коэффициент возврата элемента (Кв).
 (2.16)
(2.16)
Кв определяет ширину зоны (петли) неоднозначности релейной характеристики.
4. Коэффициент запаса срабатывания (Кз).
 (2.17)
(2.17)
5. Кратность релейной характеристики (Кк).
 . (2.18)
. (2.18)
6. Коэффициент управления (Ку).
 . (2.19)
. (2.19)
Этот коэффициент характеризует управляемость элемента.
На величины  и
и  оказывают существенное влияние возмущающие воздействия (
оказывают существенное влияние возмущающие воздействия ( ), т.е.:
), т.е.:
 , (2.20)
, (2.20)
 .
.
Аналогично непрерывной характеристике управления для этих параметров можно записать (рис. 2.23):
 ; (2.21)
; (2.21)
 . (2.22)
. (2.22)
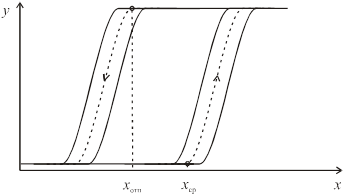
Рис. 2.23. Влияние возмущающих воздействий на параметры
релейной характеристики
Значения Кз и Кв с учетом возмущающих воздействий будут равны:
 , (2.23)
, (2.23)
 . (2.24)
. (2.24)
Date: 2015-09-20; view: 429; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |