Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Классификация систем автоматического регулирования
Основные понятия и определения
ТАУ – это научная и техническая дисциплина, она изучает общие принципы системной организации на основе построения математических моделей объектов и систем управления. Это позволяет оценивать характеристики и свойства проектируемых систем, создавать системы, отвечающие заданным требованиям качества.
Анализ - исследование системы управления, путем построения ее математической модели и изучения свойств этой модели. Анализ проводится с целью выяснения вопроса о том, способна ли в принципе модель САР решать задачу управления, и если нет, то какими методами и средствами ее можно сделать работоспособной.
Синтез – (теоретическое конструирование) – это построение модели системы управления, обеспечивающей требуемое поведение объекта управления.
ТАУ (теория автоматического управления) – это научно-техническая дисциплина, изучающая и развивающая методы анализа и синтеза моделей систем управления.
Кибернетика – наука об управлении. Основывается на изучении процессов протекающих в объектах управления, на изучении того, как эти объекты реагируют на внешние воздействия и определении способов воздействия на объект с тем, чтобы оптимизировать его состояние и поведение. Объектами управления в кибернетике могут быть устройства, машины, живые организмы, их органы, коллективы людей, популяции животных и т.п.
Автоматическое управление – это осуществление совокупности воздействий, выбранных из множества возможных, на объект управления, с целью оптимизировать в определенном заданном смысле его состояние и поведение.
Автоматическое регулирование – это поддержание постоянной или меняющейся по некоторому закону во времени какой-то величины, характеризующей объект управления. Величина должна меняться требуемым образом вопреки препятствующим этому факторам
Объект управления (ОУ) в ТАУ – это устройство, машина или процесс и др., которые характеризуются некоторыми физическими величинами. Эти величины могут быть измерены. Объект управления способен воспринимать внешние воздействия и реагировать на них изменением значений выходных величин.
Состояние любого ОУ, которые можно характеризовать одной или несколькими физическими величинами. Физические величины, характеризующие состояние объекта управления называются выходными переменными объекта.
Задающая величина – величина, в соответствии с которой должна изменяться управляемая величина объекта. Эта величина подается на вход САР.
Возмущающая величина характеризует совокупность факторов, причин, воздействующих на объект управления и препятствующих его требуемому поведению. Эта величина моделирует неизбежные помехи, влияющие на поведение объекта управления.
Объектами управления в технике могут быть машины, механизмы, электромеханические устройства, более простые САР и др.

Рис. Обозначение объекта управления (ОУ) на функциональной схеме. x(t) - воздействие на объект, y(t) – реакция объекта, отклик на воздействие
Примеры ОУ:
Рис. Двигатель постоянного тока (ДПТ). Управляющая величина - напряжение якоря, управляемая величина – частота вращения вала, возмущение – момент сопротивления на валу.
Функциональная схема состоит из блоков соответствующих функциональным, физически существующим элементам объектов, а стрелки указывают на направление передачи энергии между ними.
Пример:
Рис. Пример функциональной схемы. Г – генератор; ТП – тиристорный преобразователь; ДПТ – двигатель постоянного тока
Структурная (структурно-алгоритмическая) схема – состоит из звеньев, соответствующих математическим операциям преобразования сигналов; стрелки между блоками указывают направление передачи информации (сигналов).
Несмотря на многообразие технических устройств можно выделить 3 базовых алгоритма их функционирования. К ним относятся:
Алгоритм стабилизации, который требует постоянства вектора выходного состояния ОУ  и равенство его заданному значению
и равенство его заданному значению  .
.
 .
.
При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования.
Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть
 .
.
Примером использования такого алгоритма являются системы числового программного управления.
Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением:
 ,
,
где  – неопределенная функция времени.
– неопределенная функция времени.
Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону.
Для формирования требуемого алгоритма работы ОУ, на него подается одно или несколько управляющих воздействий.
На практике вектор выходных состояний в процессе работы ОУ отклоняется от требуемого значения. Это вызывается взаимодействием объекта с внешней средой и изменением параметров объекта управления. Взаимодействие ОУ с внешней средой характеризуется различного рода возмущающими факторами. Их совокупность называется вектором возмущающих воздействий на объект управления или внешних вектором возмущений.
Для любого инерционного ОУ оказывается невозможным мгновенное изменение выходной переменной вслед за управляющим воздействием. При изменении управляющего воздействия на объект, обладающий некоторой инерционностью, возникает переходный процесс. В течении этого процесса вектор выходного состояния ОУ не будет соответствовать требуемому значению. Характер переходного процесса определяется динамическими свойствами ОУ и закона изменения управляющего воздействия.
Переходный процесс в ОУ.
Действие любого возмущающего фактора на объект управления приводит к отклонению значения вектора выходного состояния ОУ от требуемого значения. То есть имеет место соотношение:
 .
.
Такое отклонение называется ошибкой управления объектом управления.
Одной из основных задач теории автоматического управления можно считать определение такого алгоритма управления, который обеспечивает минимальное или не превышающего необходимого, отклонение вектора выходного состояния ОУ от требуемого значения.
Принцип действия всякой системы автоматического управления (САУ) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате действия которого последний переходит в требуемое состояние.
Для решения этой задачи используются разнообразные управляющие устройства или регуляторы. Управляющим устройством называется устройство, обеспечивающее формирование управляющего воздействия на объект управления, соответствующего алгоритму его работы. Устройство, выполняющее эти функции без непосредственного участия человека, называется автоматическим управляющим устройством или регулятором.
Совокупность объекта управления и управляющего устройства, взаимодействие которых приводит к выполнению поставленной цели, называется системой автоматического управления. Такая система включает в себя кроме ОУ и устройства управления, задающее устройство, которое формирует необходимый закон изменения требуемых значений вектора выходного состояния объекта управления.
Система управления - это совокупность одного или нескольких управляемых объектов и управляющей ими системы
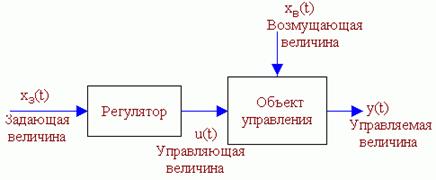
Функциональная схема САУ
Принцип действия всякой системы автоматического управления (САУ) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
В ТАУ основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации).
Задачи общей ТАУ заключаются в решении перечисленных проблем. При поиске решений используются:
- Методы анализа устойчивости замкнутых САУ
- Методы оценки качественных показателей САУ
- Методы повышения точности САУ
- Методы коррекции динамических свойств САУ
- Методы синтеза САУ
Разработка же методов решения прикладных инженерных задач стоящих при проектировании САУ есть глобальная цель теории систем автоматического регулирования.
Классификация систем автоматического регулирования

Основные признаки классификации САУ:
По характеру математических соотношений различают:
1. линейные системы автоматического управления, для которых справедлив принцип суперпозиции;
2. нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив.
Классификация по характеру изменения величин: как линейные, так и нелинейные САУ могут подразделяться на:
дискретные и дискретно-непрерывные,
1. системы непрерывного действия - аналоговые
2. системы импульсного действия (AM, ФМ, ЧМ, ШИМ, ЧИМ,...)
3. системы дискретного действия (01001011110101100010101)
4. системы релейного действия
стационарные и нестационарные.
1. стационарные - САУ, параметры элементов которой не зависят от времени работы системы
2. нестационарные
Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами.
По назначению, то есть характеру изменения задающего воздействия, различают:
1. системы автоматической стабилизации;
2. системы программного управления;
- следящие системы.
- системы самонаведения, сопровождения, автопилотирования.
По принципу управления различают:
1. системы с управлением по разомкнутому циклу;
2. системы с управлением по замкнутому циклу;
3. системы комбинированного управления.
По характеру используемых для управления сигналов различают:
1. непрерывные или аналоговые системы автоматического управления;
2. дискретные системы автоматического управления, из которых выделяет:
o импульсные системы автоматического управления;
o релейные системы автоматического управления;
o цифровые системы автоматического управления.
По характеру используемой информации об условиях работы различают:
1. системы автоматического управления с жестким законом управления и структурой - не адаптивные системы;
2. системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся - адаптивные системы:
o системы автоматической настройки;
o самообучающие системы;
o самоорганизующие системы.
o системы с переменной структурой
o системы с самонастройкой программы
o системы с самонастройкой параметров
o системы с самонастройкой структуры
По количеству выходных координат объекта управления различают:
1. одномерные системы автоматического управления;
2. многомерные системы автоматического управления.
Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин.
Классификация по типу ошибки в статике:
1. статические САУ
2. астатические САУ
Date: 2015-09-19; view: 1920; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |