Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Приклад виконання завдання. До вантажу 1 (рис. 2.6) масою m1=20кг прив’язаний трос, який перекинутий через нерухомий блок 4 і другий кінець якого закріплений на поверхні шківа 2 радіусом
До вантажу 1 (рис. 2.6) масою m1=20кг прив’язаний трос, який перекинутий через нерухомий блок 4 і другий кінець якого закріплений на поверхні шківа 2 радіусом r2 (m2=2кг). Механічна система приводиться до руху моментом  прикладеним до ступінчатого шківа 3 масою m3=3кг.
прикладеним до ступінчатого шківа 3 масою m3=3кг.
Знайти закон руху вантажу 1, якщо на тіло 2 діє момент опору МОП = 15 Н×м і при t=0 кутова швидкість тіла 3 -  =
=  . Більший радіус у шківа 2, R2=0,4м, менший – r2 = 0,2м, радіус інерції – і2=0,3м. Тіла 3 та 4 мають однакові маси m3=m4 і розміри R3=R4=0,3м. Тіла 2,3 та 4 обертаються навколо горизонтальних нерухомих осей, а тіло 1 переміщується поступально.
. Більший радіус у шківа 2, R2=0,4м, менший – r2 = 0,2м, радіус інерції – і2=0,3м. Тіла 3 та 4 мають однакові маси m3=m4 і розміри R3=R4=0,3м. Тіла 2,3 та 4 обертаються навколо горизонтальних нерухомих осей, а тіло 1 переміщується поступально.
Рисунок 2.6
Розв’язання. Розглянемо окремо рух тіл 2 і 3 та рух тіл 1 і 4.
До тіла 3 (рис. 2.7) прикладені зовнішні сили: пара сил з моментом М, сила тяжіння P3=m3g, реакції циліндричного шарніра X3 і Y3, реакції тіла 2 – колове зусилля S3 і сила нормального тиску N3.
Запишемо диференціальне рівняння обертання тіла 3 навколо нерухомої осі враховуючи, що якщо момент зовнішніх сил діє у напрямку руху тіла, тоді записуємо його з додатним знаком.
де  - момент інерції тіла відносно осі z,
- момент інерції тіла відносно осі z,  - кутове прискорення тіла 3,
- кутове прискорення тіла 3,  - момент зовнішніх сил, прикладених до тіла 3, відносно осі z.
- момент зовнішніх сил, прикладених до тіла 3, відносно осі z.
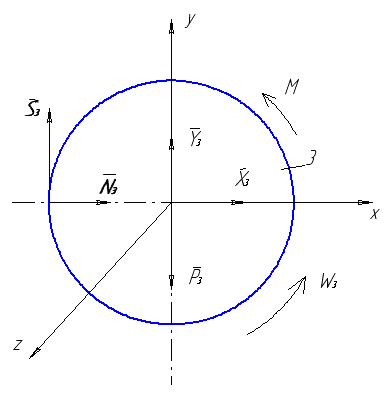
Рисунок 2.7
 . (2.1)
. (2.1)
Початкові умови:
при t=0,  ,
,  . (2.2)
. (2.2)
На тіло 2 діють такі зовнішні сили: сила тяжіння P2=m2g, реакції циліндричного шарніра X2 та Y2, натяг троса S2 (трос працює тільки на розтяг), реакції тіла 3 –  та
та  , які за третім законом Ньютона направлені в протилежні сторони сил S3 та N3 (рис. 2.7).
, які за третім законом Ньютона направлені в протилежні сторони сил S3 та N3 (рис. 2.7).
Диференціальне рівняння обертання тіла 2 (рис. 2.8) навколо горизонтальної осі Z.
 (2.3)
(2.3)
де  - момент інерції тіла 2 відносно осі Z.
- момент інерції тіла 2 відносно осі Z.
Оскільки  , то рівняння (2.3) запишеться у вигляді
, то рівняння (2.3) запишеться у вигляді
 (2.4)
(2.4)
До тіл 1 та 4 (рис. 2.9) прикладені зовнішні сили: сили тяжіння P1=m1g та P4=m4g, реакція троса  , реакції циліндричного шарніра X4 та Y4.
, реакції циліндричного шарніра X4 та Y4.
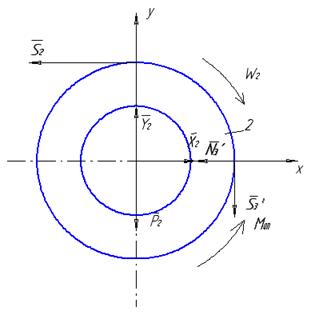
Рисунок 2.8
Теорема про зміну кінетичного моменту для тіл 1 та 4 (рис. 2.9) в проекціях на вісь Z запишеться:
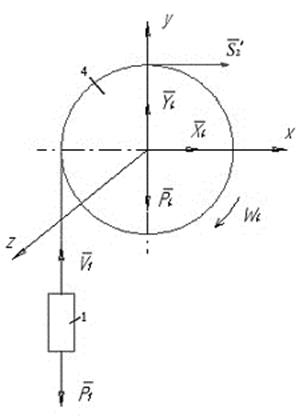
Рисунок 2.9
 (2.7)
(2.7)
де lZ – кінетичний момент системи тіл 1 та 4 відносно осі Z,  - головний момент зовнішніх сил.
- головний момент зовнішніх сил.
Кінетичний момент LZ складається із моменту кількості руху LZ1 тіла 1 та кінетичного моменту LZ4 тіла 4 відносно осі Z
Враховуючи, що  , а
, а  ,кінетичний момент системи LZ визначимо за формулою
,кінетичний момент системи LZ визначимо за формулою

Тепер диференціальне рівняння (2.7) набуває вигляду
 (2.8)
(2.8)
Якщо до диференціальних рівнянь (2.1), (2.4), (2.8) додати кінематичні співвідношення
 (2.9)
(2.9)
тоді отримаємо систему шести рівнянь в які входять невідомі: 
Розв’язуючи систему рівнянь (2.1), (2.4), (2.8), (2.9) маємо:

З урахуванням того, що m1=20кг, m2=2кг, m3=m4=3кг, r2=0,2м, R2=0,4м, і2=0,3м, R3=R4=0,3м, М=(16+11t2)  , M0=15 , g=9,81
, M0=15 , g=9,81  , отримаємо
, отримаємо
 . (2.20)
. (2.20)
Для визначення закону руху тіла 1, інтегруємо двічи диференціальне рівняння (2.20), беручи до уваги початкові умови (2.2)
Перший інтеграл диференціального рівняння (2.20)
Закон руху тіла 1: 
Date: 2015-09-03; view: 367; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |