Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Введение. «Одна машина может выполнять работу сотни обыкновенных людей, но никакая машина не заметит одного выдающегося человека»
Лекция 1
«Одна машина может выполнять работу сотни обыкновенных людей, но никакая машина не заметит одного выдающегося человека».
Элберт Хаббард.
Слово «робот» происходит от чешского слова «robota», означающего работу. Впервые это слово прозвучало в пьесе К.Чапека «Р.У.Р» в 1921г.
Современное значение слова «робот» - автоматическое устройство, которое выполняет функции, обычно приписываемые человеку. В соответствии с этим определением стиральная машина является роботом.
Более точное определение промышленных роботов: «перепрограммируемый многофункциональный манипулятор, предназначенный для осуществления различных, заранее заданных перемещений материалов, деталей, инструментов или специальных приспособлений с целью выполнения различных работ».
Современный промышленный робот – универсальный, оснащенный компьютером манипулятор, состоящий из нескольких твердых звеньев, последовательно соединенных вращательными или поступательными сочленениями.
Первые роботы, с которых началась современная робототехника, появились сразу после второй мировой войны. В конце 40-х годов в Окриджской и Аргоннской национальных лабораториях были начаты исследовательские программы по созданию дистанционно управляемых механических манипуляторов для работы с радиоактивными материалами. Разрабатывались манипуляторы копирующего типа, предназначенные для точного воспроизведения движений руки и кисти человека-оператора. В систему входили задающий и копирующий манипуляторы. Позднее путем установления механических связей между задающим и копирующим манипуляторами была введена обратная связь, позволяющая оператору ощущать силы взаимодействия между копирующим манипулятором и его рабочей средой. В середине 50-х годов механические способы введения обратной связи были заменены электрическими и гидравлическими.
После этого были разработаны манипуляторы с компьютером, способные выполнять автономно повторяющиеся операции. От специализированных автоматических машин эти роботы отличались возможностью смены выполняемых операций.
В начале 60-х годов была разработана механическая рука с тактильными датчиками (чувствительными к весу, усилию, температуре и т. п.). В последствии (в конце 60-х) к этому добавлялись «глаза» и «уши» – телекамера с микрофонами.
В 70-х годах началась разработка и промышленное использование манипуляторов для сборочных операций. Совершенствуются методы управления.
В настоящее время робототехника представляет собой значительно более обширную область науки, чем можно было себе представить всего несколько лет назад. Она включает вопросы кинематики, динамики, планирования стратегий, языков программирования и искусственного интеллекта.
Системы и комплексы, автоматизированные с помощью роботов, называют роботизированными. Роботизированные системы и комплексы, в которых роботы выполняют основные функции, называют робототехническими.
Роботы находят применение в других (кроме промышленности) областях: транспорте (беспилотная авиация, луноходы и т.п.), в сельском хозяйстве, в здравоохранении (протезирование, микрохирургия, и т.п.), в сфере обслуживания (бытовые машины, спасательные работы, торговые автоматы), космос, подводные аппараты и т.п.
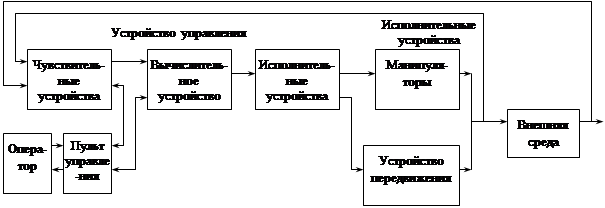
Рисунок 1.1. Функциональная схема робота
Date: 2015-08-15; view: 1611; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |