Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Стереоизображение
При необходимости получения глубины изображения используют стереоизображение. Стереоизображение включает два отдельных вида изображаемого объекта (рис. 25.2), например пространственной точки w.
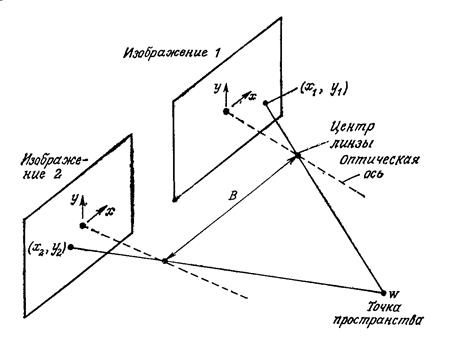
Рисунок 25.2. Схема получения стереоизображения
Расстояние между центрами двух линз называется базовой линией. Требуется определить координаты (X, Y, Z) точки w, заданной точками ее изображения  и
и  . Предполагается, что камеры идентичны и системы координат обеих камер полностью совпадают, отличаясь только расположением их начал.
. Предполагается, что камеры идентичны и системы координат обеих камер полностью совпадают, отличаясь только расположением их начал.
Допустим, что первая камера совмещена с декартовой системой координат(рис. 25.3).

Рисунок 25.3. Вид сверху на рис. 25.2 при совмещении первой камеры
с декартовой системой координат
Тогда точка w лежит на линии с координатами:
 , (25-1)
, (25-1)
где индексы у X и Z обозначают, что к началу декартовой системы координат передвинута первая камера, а вторая камера и точка w также переместятся в этой системе. При этом сохраняется относительное расположение элементов системы, показанное на рис. 25.1. Если вместо этого к началу декартовой системы координат передвинута вторая камера, то точка w лежит на линии с координатами:
 . (25-2)
. (25-2)
Однако благодаря наличию расстояния между камерами и тому, что координаты Z точки w одинаковы в обеих системах координат камер, имеем:
 (25-3)
(25-3)
и  , (25-4)
, (25-4)
где В –базовая линия.
Подставляя уравнения (25-3) и (25-4) в уравнения (25-1) и (25-2), получим:
 (25-5)
(25-5)
и  . (25-6)
. (25-6)
Вычитая уравнение (25-6) из уравнения (25-5) и решая его относительно Z, получим:
 . (25-7)
. (25-7)
Отсюда видно, что координата Z точки w легко вычисляется при известной разности между соответствующими координатами  и
и  изображения, а также значений базовой линии и фокусного расстояния.
изображения, а также значений базовой линии и фокусного расстояния.
Date: 2015-08-15; view: 299; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |