Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Управление манипуляторами промышленного робота
Лекция 16
Если динамические уравнения движения манипулятора заданы, целью управления манипулятором является выполнение им движений в соответствии с заданным рабочим критерием.
Проблема управления манипулятором в общем случае сводится к следующим шагам:
1. к получению его динамических моделей;
2. к определению закона управления им на основе этих моделей для обеспечения требуемых рабочих и динамических характеристик системы.
Движение манипулятора осуществляется в два этапа:
1) транспортное движение манипулятора в зону действия;
2) управление (коррекция) движением по сигналам датчиков обратной связи.
Рассматривая управление манипулятором как задачу формирования траектории движения (рис. 16.1), управление движением можно подразделить на три основных вида:
1. Управление движением сочленений манипулятора.
· Сервомеханизм звена (схема управления манипулятором робота Пума).
· Метод вычисления моментов.
· Оптимальное по быстродействию управление.
· Управление переменной структурой.
· Нелинейное независимое управление.
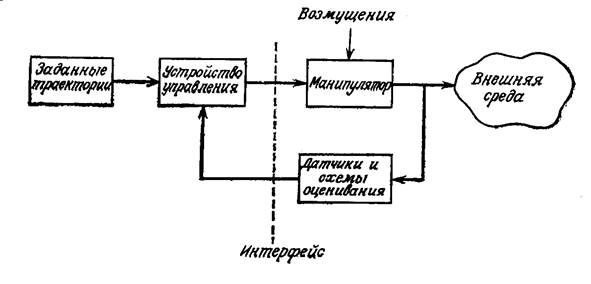
Рисунок 16.1. Общая блок-схема управления манипулятором робота
2. Программное управление движением в декартовом пространстве по скорости, ускорению и силе.
3. Адаптивное управление.
· Адаптивное управление по заданной модели.
· Самонастраивающееся адаптивное управление.
· Адаптивное управление по возмущению с компенсацией по прямой связи.
· Адаптивное управление программным движением.
Предполагается, что движение вдоль траектории в связанной или декартовой системе координат является функцией времени.
Date: 2015-08-15; view: 336; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |