Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Формирование закона частотного регулирования привода подачи очистных комбайнов
Несомненно, мехатронным объектом является частотно-регулируемый привод перемещения очистных комбайнов [1], включающий два идентичных узла привода подачи  (рисунок 1), получающих питание от - преобразователя электрического ПЭЭ и состоящих из электромеханического преобразователя
(рисунок 1), получающих питание от - преобразователя электрического ПЭЭ и состоящих из электромеханического преобразователя  (асинхронный электродвигатель), механического преобразователя
(асинхронный электродвигатель), механического преобразователя  (редуктор), механического преобразователя
(редуктор), механического преобразователя  (трехэлементный движитель «шестерня – цевочная звезда – цевочная рейка»).
(трехэлементный движитель «шестерня – цевочная звезда – цевочная рейка»).
Входная управляющая функция  , значение которой определяет задаваемую скорость
, значение которой определяет задаваемую скорость  подачи комбайна, преобразуется электронной компонентой ПЭЭ в электрический сигнал
подачи комбайна, преобразуется электронной компонентой ПЭЭ в электрический сигнал  с переменными значениями напряжения
с переменными значениями напряжения  и частоты
и частоты  . Выходная функция
. Выходная функция  , количественно определяемая тяговым усилием
, количественно определяемая тяговым усилием  и скоростью подачи
и скоростью подачи  , характеризует механическое поступательное движение комбайна.
, характеризует механическое поступательное движение комбайна.
Электромеханическая компонента представлена модулями . Электрическая энергия  со значениями
со значениями  и
и  преобразуется в механическое вращательное движение – интерфейс
преобразуется в механическое вращательное движение – интерфейс  , характеризующийся моментом
, характеризующийся моментом  и частотой вращения
и частотой вращения  .
.
Механическая компонента представлена модулями  и
и  . Модули преобразуют интерфейс
. Модули преобразуют интерфейс  в интерфейс
в интерфейс  - вращательное движение во вращательное движение с другими параметрами. Механическое вращательное движение преобразуется модулями в механическое поступательное – функция
- вращательное движение во вращательное движение с другими параметрами. Механическое вращательное движение преобразуется модулями в механическое поступательное – функция  . Тяговое усилие реализуется при сложении сил, создаваемых .
. Тяговое усилие реализуется при сложении сил, создаваемых .
Сформулируем закон частотного регулирования привода перемещения очистного комбайна с учетом взаимодействия электронной (модуль ПЭЭ), электромеханической (модули ) и механических (модули и ) (см. рисунок 1) компонент. В качестве примера представлено исследование системы подачи комбайна УКД400, предназначенного для механизированной выемки угля в составе очистных комплексов в забоях пологих и наклонных пластов мощностью до 1,5 м.
Основными параметрами привода подачи являются: диапазон регулирования скорости, необходимые тяговые усилия, а также перегрузочная способность, что существенно в связи со значительной динамикой нагрузки.
Рисунок 1 – Структурная схема частотно-регулируемого привода подачи
Требования к диапазону регулирования скорости очистного комбайна связано с особенностями технологии его работы. Из опыта эксплуатации следует, что минимальное значение скорости подачи комбайна, в частности, при самозарубке в пласт способом косых заездов, составляет 0,5 м/мин, а максимальное значение указанной величины при рациональном согласовании параметров очистного комбайна с прочим горно-шахтным оборудованием ограничивают скоростные возможности машиниста и крепления забоя. Предельная скорость перемещения горнорабочего за комбайном составляет 7 м/мин для тонких пластов, являющихся областью применения комбайна УКД400 [2]. Принимая во внимание сказанное выше, а также учитывая, во-первых, то, что максимальная скорость крепления составляет 8 м/мин (для крепей с автоматизированным управлением), а также, во-вторых, перспективы развития комбайновой выемки, принимаем диапазон изменения необходимой, скорости подачи в режиме выемки угля в пределах от 0,5 до 12 м/мин, то есть диапазон регулирования не ниже 24 (для условий тонких пластов).
Статическое тяговое усилие  привода подачи в соответствии с [3] определяется следующим образом:
привода подачи в соответствии с [3] определяется следующим образом:
 , ,
| (1) |
где  - коэффициент, учитывающий дополнительные сопротивления перемещению комбайна (принимается равным 1,4);
- коэффициент, учитывающий дополнительные сопротивления перемещению комбайна (принимается равным 1,4);
 - угол падения линии забоя;
- угол падения линии забоя;
 - коэффициент трения комбайна (о почву – 0,35; о направляющие конвейера – 0,21);
- коэффициент трения комбайна (о почву – 0,35; о направляющие конвейера – 0,21);
 - масса комбайна;
- масса комбайна;
 - суммарная сила подачи на исполнительном органе;
- суммарная сила подачи на исполнительном органе;
 - число исполнительных органов.
- число исполнительных органов.
Расчеты показывают, что для комбайна УКД400 пределы изменения  для всего диапазона условий эксплуатации: в режиме выемки - от 10 до 40 т (при скорости подачи от 0,5 до 12 м/мин ), в режиме перегона (независимо от величины скорости подачи) – от 9 до 25 т [4]. Для конкретных условий (угол наклона пласта, сопротивляемость резанию) изменение необходимого статического тягового усилия подачи незначительно для указанного выше диапазона регулирования (отношение значения «вверху» и «внизу» составляет 1,1-1,3).
для всего диапазона условий эксплуатации: в режиме выемки - от 10 до 40 т (при скорости подачи от 0,5 до 12 м/мин ), в режиме перегона (независимо от величины скорости подачи) – от 9 до 25 т [4]. Для конкретных условий (угол наклона пласта, сопротивляемость резанию) изменение необходимого статического тягового усилия подачи незначительно для указанного выше диапазона регулирования (отношение значения «вверху» и «внизу» составляет 1,1-1,3).
Закон частотного управления из условия сохранения перегрузочной способности при синусоидальной форме напряжения для идеализированного двигателя (активное сопротивление статора  =0, ненасыщенная магнитная цепь двигателя, принудительное охлаждение) установлен М.П. Костенко и записывается следующим образом:
=0, ненасыщенная магнитная цепь двигателя, принудительное охлаждение) установлен М.П. Костенко и записывается следующим образом:
 , ,
| (2) |
где  и
и  - напряжения на статоре;
- напряжения на статоре;
 и
и  - частота статора;
- частота статора;
 и
и  - электромагнитные моменты.
- электромагнитные моменты.
Известны его частные случаи для регулирования по граничному моменту: а) при постоянном моменте нагрузки:  ; б) при нагрузке с постоянной мощностью:
; б) при нагрузке с постоянной мощностью:  ; в) при вентиляторной нагрузке:
; в) при вентиляторной нагрузке:  .
.
Как отмечено выше, изменение необходимого статического тягового усилия подачи незначительно для конкретных условий эксплуатации, в связи с чем при реализации частотно-регулируемого привода подачи применяется закон регулирования  (пропорциональное регулирование) без обратных связей (разомкнутая система). Так как в связи с требованиями безопасности привод подачи является двухдвигательным, использование замкнутых систем управления (как скалярных, так и векторных) существенно затруднено.
(пропорциональное регулирование) без обратных связей (разомкнутая система). Так как в связи с требованиями безопасности привод подачи является двухдвигательным, использование замкнутых систем управления (как скалярных, так и векторных) существенно затруднено.
При использовании закона частотное регулирование при изменении частоты и подводимого к статору напряжения может производиться в двух зонах: не только ниже основной частоты (относительная частота  меньше 1), но и выше (
меньше 1), но и выше ( , обычно осуществляется при постоянной мощности нагрузки при неизменном напряжении). Преимущество закона заключается в его простоте, недостатком является невозможность обеспечения перегрузочной способности
, обычно осуществляется при постоянной мощности нагрузки при неизменном напряжении). Преимущество закона заключается в его простоте, недостатком является невозможность обеспечения перегрузочной способности  в широком диапазоне регулирования скорости при постоянном моменте нагрузки из-за влияния падения напряжения на активном сопротивлении статора [5]. С целью снижения негативного влияния указанного фактора используют закон
в широком диапазоне регулирования скорости при постоянном моменте нагрузки из-за влияния падения напряжения на активном сопротивлении статора [5]. С целью снижения негативного влияния указанного фактора используют закон  с «корректировкой» (напряжение выше рассчитанного в соответствии с упомянутым законом), который ниже будем называть законом, обеспечивающим увеличение .
с «корректировкой» (напряжение выше рассчитанного в соответствии с упомянутым законом), который ниже будем называть законом, обеспечивающим увеличение .
В [5] предложен закон регулирования для привода без обратных связей (разомкнутая система), обеспечивающий постоянство  , предельная относительная частота
, предельная относительная частота  (при регулировании «вниз» от основной частоты) составляет ориентировочно:
(при регулировании «вниз» от основной частоты) составляет ориентировочно:
 , ,
| (3) |
где  ,
,  , - активное и индуктивное сопротивления обмотки статора (для Т-образной схемы замещения);
, - активное и индуктивное сопротивления обмотки статора (для Т-образной схемы замещения);
 , - приведенное индуктивное сопротивление обмотки ротора (для Т-образной схемы замещения).
, - приведенное индуктивное сопротивление обмотки ротора (для Т-образной схемы замещения).
С учетом величин мощностей двигателей подачи (30-45 кВт) в соответствии с (3) диапазон регулирования не более 3-4 (вниз от основной скорости), что значительно меньше требуемой величины.
В связи с этим, как будет показано ниже, сформулирован закон регулирования на основе реальной тяговой характеристики привода, допускающий уменьшение перегрузочной способности двигателя ниже паспортной в области низких скоростей, при этом обеспечивающий устойчивую работу привода в двух зонах (выше и ниже основной частоты).
Исходя из идеализированной тягово-скоростной характеристики привода мощность привода подачи  (режим S1) определяется по формуле:
(режим S1) определяется по формуле:
 , ,
| (4) |
где  - максимальная скорость подачи;
- максимальная скорость подачи;
 - статическое тяговое усилие, соответствующее
- статическое тяговое усилие, соответствующее  , рассчитывается в соответствии с (1);
, рассчитывается в соответствии с (1);
 - коэффициент полезного действия передач привода (в расчете принят равным 0,75).
- коэффициент полезного действия передач привода (в расчете принят равным 0,75).
В соответствии с (4)  =57,5 кВт исходя из
=57,5 кВт исходя из  =22 т и
=22 т и  =12 м/мин (для представительных условий эксплуатации -
=12 м/мин (для представительных условий эксплуатации -  =10°, сопротивляемость резанию 240 Н/мм); поэтому мощность единичного двигателя подачи принята равной 30 кВт (57,5/2). При этом указанный двигатель должен иметь достаточно высокую перегрузочную способность (2,5-2,7). С учетом этих требований разработан двигатель (ЭКВ4-30-6 -02).
=10°, сопротивляемость резанию 240 Н/мм); поэтому мощность единичного двигателя подачи принята равной 30 кВт (57,5/2). При этом указанный двигатель должен иметь достаточно высокую перегрузочную способность (2,5-2,7). С учетом этих требований разработан двигатель (ЭКВ4-30-6 -02).
Далее необходимо осуществить выбор передаточного отношения привода, зависящего от целого ряда взаимосвязанных вопросов (касающихся конструкции, в том числе параметров звезды, рейки и т.д.), в данной статье не рассматривающихся. В конечном итоге упомянутое передаточное отношение определяет скорость подачи  , соответствующую номинальной частоте преобразователя
, соответствующую номинальной частоте преобразователя  . В данной работе примем =8 м/мин. Следует отметить, что при проектировании следует определять этот параметр методом итерации, формируя каждый раз соответствующий закон частотного управления с целью обеспечения необходимой перегрузочной способности привода во всем диапазоне регулирования скорости, что подробно будет пояснено ниже.
. В данной работе примем =8 м/мин. Следует отметить, что при проектировании следует определять этот параметр методом итерации, формируя каждый раз соответствующий закон частотного управления с целью обеспечения необходимой перегрузочной способности привода во всем диапазоне регулирования скорости, что подробно будет пояснено ниже.
Для анализа возможностей привода и выбора зависимости напряжения преобразователя от частоты необходимо воспользоваться системой уравнений, учитывающих функционирование синергетически связанных электронной, электромеханических и механических компонент частотно-регулируемого привода подачи.
Для расчета момента двигателя применена методика [5].
Схема замещения фазы двигателя при частотном управлении приведена на рисунке 2.
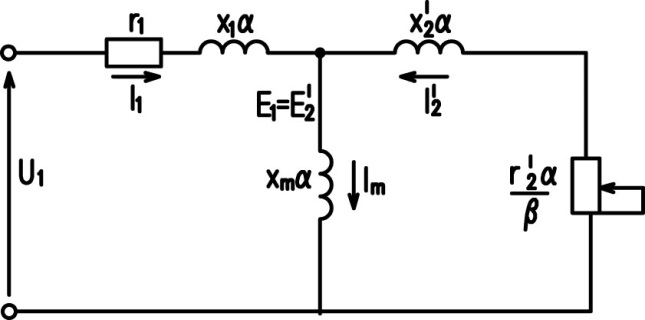
Рисунок 2 - Схема замещения фазы асинхронного двигателя при частотном управлении
При выполнении расчета использованы следующие обозначения.
Параметр абсолютного скольжения  , или относительная частота ротора – отношение абсолютного скольжения
, или относительная частота ротора – отношение абсолютного скольжения  к синхронной угловой скорости
к синхронной угловой скорости  при номинальной частоте
при номинальной частоте
 , ,
| (5) |
где  - частота тока ротора.
- частота тока ротора.
Параметр  используется вместо скольжения
используется вместо скольжения  и связан с ним соотношением
и связан с ним соотношением
 . .
| (6) |
Коэффициент рассеяния соответственно для статора и ротора
 и и  . .
| (7) |
Общий коэффициент рассеяния
 . .
| (8) |
приведена итоговая система уравнений (9), определяющая работу частотно-регулируемого привода подачи.
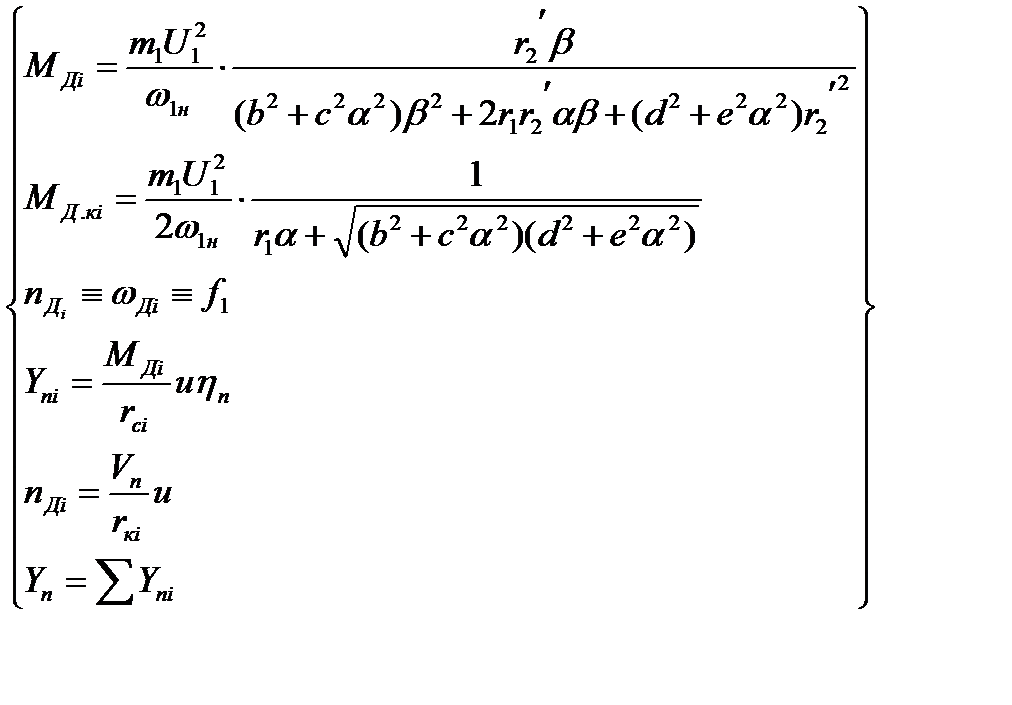
|
| (9) |
 где
где  - число фаз статора;
- число фаз статора;
 - максимальный момент двигателя;
- максимальный момент двигателя;
 ;
;  ;
;  - коэффициенты, зависящие от параметров схемы замещения;
- коэффициенты, зависящие от параметров схемы замещения;
 - реактивное сопротивление контура намагничивания;
- реактивное сопротивление контура намагничивания;
 ,
,  - угловая скорость и частота вращения двигателя;
- угловая скорость и частота вращения двигателя;
 - передаточное число редуктора;
- передаточное число редуктора;
 ,
,  - приведенные силовой и кинематический радиусы зацепления [6];
- приведенные силовой и кинематический радиусы зацепления [6];
 - тяговое усилие каждого из
- тяговое усилие каждого из  ;
;
 - общее тяговое усилие.
- общее тяговое усилие.
Система уравнений (9) позволяет получить статические механические характеристики с учетом отрицательного влияния активного сопротивления статора.
При этом следует отметить, что нагрузки в механизме перемещения носят ярко выраженный динамический характер (установлено экспериментально), причем в спектральном составе имеются высокочастотные составляющие с периодом, равным периоду зацепления зуба звездочки с цевочной рейкой, и низкочастотные составляющие с периодом, равным времени прохождения одной секции рейки [7]. Колебания моментов в обоих двигателях происходят практически в противофазе как по высоко- так и по низкочастотным составляющим. С учетом такого характера нагрузки существенны вопросы устойчивой работы привода. В данной статье представлен подход к формированию закона напряжения, обеспечивающему определенную перегрузочную способность и, соответственно, устойчивость.
Упомянутый закон определяется аналитически, путем расчета значений максимального момента  двигателя, соответствующих ему значений тягового усилия
двигателя, соответствующих ему значений тягового усилия  и реализуемой перегрузочной способности
и реализуемой перегрузочной способности  (по отношению к статическому тяговому усилию
(по отношению к статическому тяговому усилию  для данной скорости подачи):
для данной скорости подачи):
| (10) |
При этом требуемые тяговые усилия не должны превышать значений, допустимых по нагреву двигателя (рассчитанных по методике [5]). Необходимая перегрузочная способность закладывается не ниже 1,5, что определено с учетом значения устойчивого момент  двигателя подачи (наибольшее возможное среднее значение крутящего момента, развиваемое упомянутым двигателем при определенной динамичности нагружения) и соответствующего тягового усилия
двигателя подачи (наибольшее возможное среднее значение крутящего момента, развиваемое упомянутым двигателем при определенной динамичности нагружения) и соответствующего тягового усилия  , рассчитанного исходя из представительного значения коэффициента вариации
, рассчитанного исходя из представительного значения коэффициента вариации  двигателя:
двигателя:
 , ,
| (11) |
 - максимальный момент двухдвигательного привода;
- максимальный момент двухдвигательного привода;
 - максимальный момент одного электродвигателя.
- максимальный момент одного электродвигателя.
Указанное выражение (11) основано на так называемом правиле трех сигм, и применительно к данному случаю означает то, что вероятность превышения моментом максимального значения (то есть опрокидывания двигателя) составляет 0,0013, что является маловероятным. Устойчивому моменту  соответствует устойчивое усилие
соответствует устойчивое усилие  .
.
Более подробное изложение данного вопроса затруднительно в связи ограниченным объемом статьи.
Формирование закона частотного управления выполняется методом итерации путем задания ряда значений частоты и напряжения (с шагом, равным 0,1 от величины  , установленным экспериментально). Упомянутый закон для привода подачи комбайна УКД400 приведен на рисунке 3, значения напряжений превышают аналогичные данные для закона пропорционального регулирования (
, установленным экспериментально). Упомянутый закон для привода подачи комбайна УКД400 приведен на рисунке 3, значения напряжений превышают аналогичные данные для закона пропорционального регулирования ( ) в 1,1-1,7 раза для интервала изменения частоты статора от 2,5 до 50 Гц.
) в 1,1-1,7 раза для интервала изменения частоты статора от 2,5 до 50 Гц.
Рисунок 3 - Зависимости напряжения на выходе преобразователя от частоты (1- для закона пропорционального регулирования , 2 – для закона регулирования, обеспечивающего увеличение перегрузочной способности).
Механические характеристики двигателя подачи, построенные для двух упомянутых выше законов регулирования напряжения от частоты, приведены на рисунке 4. На эффективность «корректировки» закона пропорционального регулирования указывают значения (перегрузочной способности по отношению к номинальному моменту) для естественной и искусственной характеристик, равные 2,1; 1,5; 0,911 и 2,6; 2,4; и 1,7 для значений частоты 30, 15 и 7,5 Гц; при этом в соответствии с техническими условиями на двигатель значение данного показателя составляет 2,6.
Рисунок 4 - Механические характеристики двигателя ЭКВ4-30-6-02 при частотном регулировании: 1, 2, 3, 4 – для закона регулирования  ; 2', 3', 4' - для закона регулирования, обеспечивающего увеличение перегрузочной способности двигателя.
; 2', 3', 4' - для закона регулирования, обеспечивающего увеличение перегрузочной способности двигателя.
Из рисунка 5, на котором приведены тягово-скоростные характеристики комбайна УКД400 (для типовых условий эксплуатации,  =10°), видно, что максимальная скорость подачи составляет: в режиме выемки - от 10 до 14,5 м/мин в зависимости от сопротивляемости резанию, в режиме перегона - не менее 15 м/мин при существенном запасе по тяговому усилию. При этом реализуемая перегрузочная способность
=10°), видно, что максимальная скорость подачи составляет: в режиме выемки - от 10 до 14,5 м/мин в зависимости от сопротивляемости резанию, в режиме перегона - не менее 15 м/мин при существенном запасе по тяговому усилию. При этом реализуемая перегрузочная способность  в относительных единицах (на графике – отн. ед.) при сопротивляемости резанию 360 Н/мм - не менее 1,5. Указанные данные относятся к передаточному отношению привода, при котором частоте 50 Гц соответствует скорость подачи 8 м/мин.
в относительных единицах (на графике – отн. ед.) при сопротивляемости резанию 360 Н/мм - не менее 1,5. Указанные данные относятся к передаточному отношению привода, при котором частоте 50 Гц соответствует скорость подачи 8 м/мин.
Рисунок 5 – Зависимости от скорости подачи тяговых усилий в режиме перегона  , выемки
, выемки  ,
,  ,
,  (при сопротивляемости резанию 120, 240 и 360 Н/мм), допустимого усилия по нагреву двигателя
(при сопротивляемости резанию 120, 240 и 360 Н/мм), допустимого усилия по нагреву двигателя  , а также реализуемой перегрузочной способности
, а также реализуемой перегрузочной способности  (при сопротивляемости резанию 360 Н/мм).
(при сопротивляемости резанию 360 Н/мм).
Таким образом, предложенный закон регулирования напряжения в зависимости от частоты позволяет обеспечить необходимые тяговые усилия, диапазон изменения скорости подачи и перегрузочную способность.
Приведенный подход к корректировке закона пропорционального регулирования напряжения от частоты для привода подачи очистного комбайна на основе принципов мехатроники позволяет исходя из требуемых диапазона регулирования и тяговых усилий сформулировать итерационным путем зависимость напряжения на выходе преобразователя от частоты, принимая во внимание результаты расчета статических механических характеристик и реализуемой перегрузочной способности электропривода.
Необходимо отметить, что анализ, использующий мехатронные подходы, дает возможность определить целесообразность создания ряда исполнений машины, отличающихся мощностью двигателей, передаточным отношением редуктора и пр., что позволит избежать избыточности, а также обеспечить высокую степень адаптации комбайна к различным условиям эксплуатации.
Date: 2015-08-15; view: 761; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |