Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Асинхронных двигателей
Частотный способ регулирования скорости обладает теми же преимуществами, что и регулирование двигателей постоянного тока изменением подведенного к обмотке якоря напряжения. Это касается, в первую очередь, экономичности, диапазона регулирования, плавности и точности при высокой жесткости искусственных механических характеристик. Одновременно с регулированием решается и проблема пуска в приводах с большими моментами инерции и работающих в повторно-кратковременных режимах. Возможность регулирования скорости АД изменением частоты вытекает из выражения синхронной скорости
 .
.
Уравнения равновесия напряжений при U= var, f1 = var (см. рис. 3.2) [110, 11, 20]
 (3.11)
(3.11)
где  – относительная частота,
– относительная частота,  – относительное значение напряжения.
– относительное значение напряжения.
Значение магнитного потока из (3.27)
 , (3.12)
, (3.12)
где  .
.
Из (3.12) видно, что магнитный поток определяется отношением  и нагрузкой (током
и нагрузкой (током  ). При этом величина
). При этом величина  от частоты не зависит, а влияние падения напряжения на активном сопротивлении (член
от частоты не зависит, а влияние падения напряжения на активном сопротивлении (член  ) усиливается с уменьшением частоты и при а →0, величина
) усиливается с уменьшением частоты и при а →0, величина  →∞.
→∞.
Момент асинхронного двигателя [20, 21]
 , (3.13)
, (3.13)
где  ; I2 – ток обмотки ротора,
; I2 – ток обмотки ротора,  через ЭДС
через ЭДС  ; ψ 2 – угол сдвига между ЭДС Е2 и током 12.
; ψ 2 – угол сдвига между ЭДС Е2 и током 12.
Момент двигателя при неизменных параметрах определяется потоком в зазоре. Следовательно, для поддержания, например, постоянства момента необходимо иметь Фδ= const, I2 = const, cos ψ 2 = const. Такие соотношения могут быть получены только при Фδ = const и f 2 = const, или, вводя параметр абсолютного скольжения,  . Очевидно, что при изменении потока Ф δ и М = const изменится ток I2, скольжение β, cos ψ 2. Подтверждением сказанного служит регулирование скорости АД в системе ТРН – АД, когда при f 1 = const снижение напряжения означает уменьшение магнитного потока.
. Очевидно, что при изменении потока Ф δ и М = const изменится ток I2, скольжение β, cos ψ 2. Подтверждением сказанного служит регулирование скорости АД в системе ТРН – АД, когда при f 1 = const снижение напряжения означает уменьшение магнитного потока.
В 1925 г. М.П. Костенко сформулировал основной закон регулирования [20], который записывается следующим образом:
 , (3.14)
, (3.14)
где Mci, Мсk – моменты нагрузки при скоростях двигателя, соответствующих частотам fi, fk при фазных напряжениях U i, Uk. Соотношение (3.14) получено при допущении r1 = 0 и постоянстве перегрузочной способности двигателя. В этом случае поток в зазоре определяется только отношением , т. е. не учитывается влияние нагрузки (слагаемое  и падение напряжения
и падение напряжения  ). Из (3.14) получены частные законы изменения при различных механических характеристиках производственных механизмов.
). Из (3.14) получены частные законы изменения при различных механических характеристиках производственных механизмов.
При постоянном моменте нагрузки Мс = const
 (3.15)
(3.15)
Для вентиляторного характера нагрузки, 
 (3.16)
(3.16)
Здесь следует отметить, что зависимость (3.16) относится к вентилятору (насосу), работающему на постоянное аэродинамическое (гидравлическое) сопротивление. При этом напор пропорционален второй степени скорости, а расход – первой степени, мощность – третьей степени скорости,  . Многие приводы насосов работают по замкнутой схеме со стабилизацией напора при переменном расходе. В этом случае M=const и закон регулирования по (3.15), т. е.
. Многие приводы насосов работают по замкнутой схеме со стабилизацией напора при переменном расходе. В этом случае M=const и закон регулирования по (3.15), т. е.  .
.
При моменте нагрузки, обратно пропорциональном скорости
 . (3.17)
. (3.17)
В таблице 3.2 приведены правила частотного регулирования по (3.14) для различных типов нагрузки.
Таблица 3.2
Правила частотного регулирования
| Параметры | 
| 
| 
| 
| 
|
Постоянная мощность

| 
| 
| const |
|
|
Постоянный момент

| const |
|
| const | const |
Вентиляционный закон

| 
|
| 
|
|
|
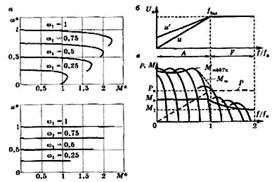
Рис 3.8 Механические характеристики АД при
частотном регулировании:
а –  ; б, в –при
; б, в –при  и с IxR –компенсацией
и с IxR –компенсацией
Важно отметить, что допущение  мало сказывается при высоких частотах, близких к номинальным, но при низких частотах резко снижается значение максимального момента (рис. 3.8, а) [4, 5]
мало сказывается при высоких частотах, близких к номинальным, но при низких частотах резко снижается значение максимального момента (рис. 3.8, а) [4, 5]
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие типы асинхронных двигателей знаете?
2. Для чего нужна схема замещения асинхронных
двигателей?
3. Что такое скольжение асинхронных двигателей и как
находится?
4. Объясните энергетические диаграммы асинхронных
двигателей.
5. Как определяется электромагнитный момент АД?
6. Нарисуйте механические характеристики АД при
изменении величины дополнительных сопротивлений
в цепи ротора.
7. Покажите характерные точки в механической
характеристике АД.
8. Перечислите методы регулирования скорости вращения АД.
9. Как понимаете жесткости механической характеристики АД?
10. На чем основан метод регулирования скорости
вращения АД с ТРИ?
11. Объясните метод регулирования скорости
вращения АД переключением числа пар полюсов.
12. Преимущество и недостатки метода регулирования
скорости вращения АД переключением числа пар полюсов.
13. На чем основан частотный метод регулирования
скорости вращения АД?
14. Перечислите и объясните законы частотного
регулирования скорости вращения АД.
15. Для каких типов АД рекомендуется метод частотного
регулирования скорости вращения?
Date: 2015-08-06; view: 402; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |