Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Для асинхронных двигателей
Эквивалентные схемы замещения, являющиеся электрическим аналогом электромеханических преобразователей энергии (ЭМИ), широко используются для анализа работы электрических машин. Такие схемы состоят из пассивных элементов – сопротивлений и индуктивностей, соединенных таким образом, чтобы физические процессы для машины и схемы описывались одинаковыми уравнениями.
Асинхронный двигатель, как и любой ЭМП, представляет собой систему токо- и магнитопроводов, т. е. совокупность электрических и магнитных цепей. Электрические цепи – это обмотки статора и ротора, а магнитные – ферромагнитные элементы плюс воздушный зазор, по которым замыкается магнитный поток. От степени насыщения стальных участков зависят потокосцепления и индуктивности обмоток, следовательно, режим магнитной цепи (индукция В, поток Ф) во многом определяет параметры электрической цепи, и наоборот.
Активные сопротивления схемы замещения (обмотки статора –  , и ротора –
, и ротора –  ) считают практически неизменными для рабочих режимов при скольжениях меньших критического (sK). При этом основной магнитный поток в зазоре Ф5 остается постоянным,
) считают практически неизменными для рабочих режимов при скольжениях меньших критического (sK). При этом основной магнитный поток в зазоре Ф5 остается постоянным,  [18, 20, 21]. Следовательно, индуктивности обмоток также практически постоянные.
[18, 20, 21]. Следовательно, индуктивности обмоток также практически постоянные.
При расчете пусковых режимов (f2 = f 1), когда вытеснением тока в обмотке короткозамкнутого ротора и насыщением зубцов от потоков рассеяния пренебречь нельзя, уточняют параметры по разработанным методикам [21].
Сами величины сопротивлений и индуктивностей рассчитывают по геометрическим размерам, физическим характеристикам материалов – удельной электропроводности у и магнитной проницаемости  [19, 20, 21].
[19, 20, 21].
На рис. 3.2 представлены: Т-образная схема замещения с приведенными к обмотке статора параметрами вторичной обмотки –  (рис. 3.2, а), подобная схеме замещения трансформатора, т. е. вращающийся ротор заменен неподвижным (эквивалентным) с соответствующими параметрами; Г-образная схема замещения с вынесенным на зажимы сети намагничивающим контуром (рис. 3.2, б, в), когда при
(рис. 3.2, а), подобная схеме замещения трансформатора, т. е. вращающийся ротор заменен неподвижным (эквивалентным) с соответствующими параметрами; Г-образная схема замещения с вынесенным на зажимы сети намагничивающим контуром (рис. 3.2, б, в), когда при  ток идеального холостого хода
ток идеального холостого хода  .
.
Приняты следующие обозначения: U1 – первичное фазное напряжение; I1 – фазный ток статора;  и
и  – активное и индуктивное сопротивления фазы обмотки статора; Iм, xм r м – ток, индуктивное и активное сопротивления намагничивающего контура;
– активное и индуктивное сопротивления фазы обмотки статора; Iм, xм r м – ток, индуктивное и активное сопротивления намагничивающего контура;  – ЭДС первичной и приведенной вторичной обмоток;
– ЭДС первичной и приведенной вторичной обмоток;  – сопротивление, в котором при токе
– сопротивление, в котором при токе  и неподвижном роторе выделяется мощность
и неподвижном роторе выделяется мощность  равная механической мощности машины
равная механической мощности машины  ;
;  ;
;  ;
;  – приведенные сопротивления обмотки ротора;
– приведенные сопротивления обмотки ротора;  ; s – скольжение,
; s – скольжение,  – синхронная угловая скорость (скорость вращения магнитного поля),
– синхронная угловая скорость (скорость вращения магнитного поля),  ; р – число пар полюсов; f1 — частота питающей сети.
; р – число пар полюсов; f1 — частота питающей сети.
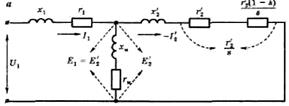
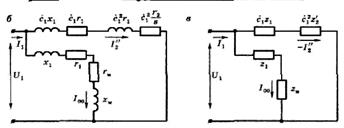
Рис. 3.2. Схемы замещения асинхронного двигателя:
а – Т-образная; б, в – Г-образные
Расчеты характеристик АД ведутся, как правило, по схеме, изображенной на рис. 3.2, б, в, поэтому в справочной литературе [23, 24, 43] приводятся параметры R1 X1, R2, Х2 (рис. 3.2, в) в относительных единицах. За базовое принимается номинальное сопротивление фазы обмотки статора  , а относительное значение параметра, например,
, а относительное значение параметра, например,  . Для асинхронных машин мощностью от нескольких киловатт и выше значения параметров [21]:
. Для асинхронных машин мощностью от нескольких киловатт и выше значения параметров [21]:
 ;
;  ;
;  ;
;  .
.
На рис. 3.3 приведены энергетические диаграммы асинхронной машины для двигательного и генераторного режимов [20], которые показывают процесс преобразования энергии и сопутствующие этому потери (pэл, pмг, pд, pмх).
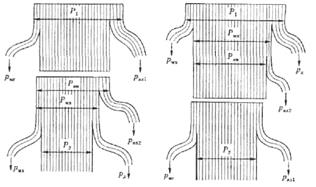
Рис. 3.3. Энергетические диаграммы асинхронной
машины в режимах: а – двигателя; б – генератора
Уравнения напряжений для фазы статора и ротора из Т-образной схемы:
 , (3.2)
, (3.2)
где  – ЭДС фазы обмотки;
– ЭДС фазы обмотки;
 – магнитный поток на полюс;
– магнитный поток на полюс;  Тл – индукция в зазоре (амплитуда); τ – полюсное деление,
Тл – индукция в зазоре (амплитуда); τ – полюсное деление,  ;
;
l1 – активная длина статора; D1 – внутренний диаметр статора; 2р – число полюсов.
Для Г-образной схемы
 (3.3)
(3.3)
где  – параметры схемы замещения по рис. 3.2, в.
– параметры схемы замещения по рис. 3.2, в.
Подводимая к двигателю электрическая мощность
 , Вт, (3.4)
, Вт, (3.4)
где т1 - 3 – число фаз; U, I – линейные напряжение и ток.
Часть этой мощности расходуется на потери в обмотке статора ΔРэл1, а вращающийся поток вызывает магнитные потери в стали ΔРFe
 (3.5)
(3.5)
Электромагнитная мощность, передаваемая вращающимся потоком через зазор на ротор
 (3.6)
(3.6)
В режиме короткого замыкания, при s = 1, двигатель развивает пусковой момент МП, представляющий важную характеристику для электроприводов
 . (3.7)
. (3.7)
При этом предполагается, что параметры схемы замещения постоянны. Для двигателей различного назначения  [20, 24, 43].
[20, 24, 43].
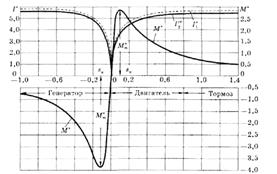
Рис. 3.4 Механическая M(s) и электромеханическая l(s)
характеристики АД КЗР

|
|
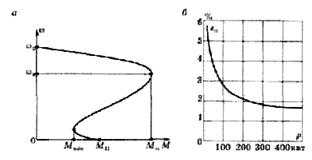
На рис. 3.4–3.6 представлены механическая и электромеханическая характеристики M*(s), I*(s) короткозамкнутого двигателя мощностью 15 кВт (рис. 3.4); механические характеристики со(Л/) двигателя с фазным ротором (рис. 3.5) и короткозамкнутым (рис. 3.6). На рис. 3.6, б приведены значения номинальных скольжений для короткозамкнутых двигателей различной мощности.
Характерными точками механической характеристики (рис. 3.4, 3.6) являются следующие:
1. s = 0, ω = ω0, М = 0, Е2 = 0,12 = 0 – точка идеального холостого хода;
2. s = 1, ω = 0, М = Мкз = МП – точка короткого замыкания, МП – пусковой момент, I1=IП =(4,5-7) I Н – пусковой ток для АД с КЗР;
3. s = sk, M = Мт – точка максимальных момента Мт и скольжения sk. В режиме генератора: -МтТ, -smr;
4. s = sH,M= MH, ω = ω 0(1 - sH) – точка номинального двигательного режима;
5. ω = ω mjn, М = Mmin, s = smin – точка минимального момента. Значение Mmin приводится в справочниках, Mmin ≈ (0,8 + 0,9) • МП.
Минимальный момент обусловлен моментами (тормозными) от высших гармонических намагничивающих сил, в основном 7-й гармоники. Скольжение
 .
.
Значение скольжения однозначно определяет и энергетический режим работы АД [20, 21]:
1. 0 < s < 1, 0 < ω < ω 0, М > 0 – двигательный режим;
2. -∞<s<0, ω 0< ω <∞, М < 0 – генераторный режим с отдачей энергии в сеть;
3. s > 1, ω < 0, М< 0 – генераторный (тормозной) режим или противовключения, когда ротор и магнитное поле вращаются в противоположных направлениях.
Пример 3.1. Для асинхронного двигателя с фазным ротором 4АН К 31551ОУЗ:
1) построить естественную механическую характеристику;
2) рассчитать сопротивление Я2д добавочного резистора, при включении которого в цепь ротора момент при пуске будет равен максимальному;
3) определить сопротивление R2Д, при котором реостатная (искусственная) характеристика пройдет через точку s = 0,2 при М = Мн.
Паспортные данные двигателя: Рн = 75 кВт; пП = 573 об/мин; U1н = 380 В; E2н = 217 В (при неподвижном и разомкнутом М роторе); η = 0,9; соsφ = 0,8; λ =Мm /МН=M*m=1,8; I 2н = 221 А; sн = 0,045; sk = 0,158.
Относительные сопротивления Г-образной схемы замещения: R1 = 0,036; R2 = 0,052; Х1 = 0,14; Х2 = 0,19; Хμ = 3,5.
Решение. 1. Построение механической характеристики:
1) коэффициент трансформации
 ;
;
2) коэффициент трансформации токов
 ;
;
3) коэффициент приведения
 ;
;
4) номинальный ток обмотки статора

5) номинальное сопротивление двигателя
6) коэффициент
 ;
;
7) сопротивления
8) критическое скольжение

(по каталогу sк = 0,158);
9) при  скольжение sк = 1. Следовательно, приведенное
скольжение sк = 1. Следовательно, приведенное  . Добавочное сопротивление R2Д = R2∑ -R2 = 0,332 - 0,072 = 0,26 Ом.
. Добавочное сопротивление R2Д = R2∑ -R2 = 0,332 - 0,072 = 0,26 Ом.
Реальное сопротивление R2Д (неприведенное)
 Ом – ответ на вопрос 2 в условии примера.
Ом – ответ на вопрос 2 в условии примера.
Проверка
 ;
;
10) максимальный момент через параметры

(по каталогу  = 2251 Нм). В режиме генератора
= 2251 Нм). В режиме генератора
 ;
;
11) уравнение естественной механической характеристики (формула Клосса)
 .
.
Задаемся значениями скольжения и находим величину момента.
| ss | 00,045 | | 0,09 | 00,12 | 00,157 | 00,30 | 00,6 | 01,0 | |
| sM |
2. Ответ, см. п. 9.
3. При номинальном моменте отношение сопротивлений роторной цепи будет
 .
.
Величина добавочного сопротивления
Date: 2015-08-06; view: 448; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |