Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Уравнение движения электропривода
Работа электропривода часто сопровождается изменением скорости движения его звеньев, что вызывается рядом причин: колебаниями механической нагрузки, включением и выключением пусковых и тормозных резисторов, изменениями напряжения питания, воздействиями со стороны системы управления и т. д. При этом привод ускоряется или замедляется, появляются инерционные (динамические) силы или моменты, которые двигатель должен преодолевать, находясь в переходном режиме. Таким образом, переходный режим – это режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент, ток и др. Исследование характера движения рабочего органа производится, как правило, на основе решения уравнения движения. Уравнение движения электропривода должно учитывать все силы и моменты, действующие в установившихся и переходных режимах.
Согласно уравнению равновесия сил и моментов получим для поступательного и вращательного движения [2, 3, 4, 5]
 (1.16)
(1.16)
где Fc и Мс, т и J – приведенные сила и момент сопротивления, масса и момент инерции;  ,
,  – динамические (инерционные) составляющие силы и момента; F, М – сила, момент двигателя.
– динамические (инерционные) составляющие силы и момента; F, М – сила, момент двигателя.
Сама электрическая машина (двигатель) в системе привода может работать в двигательном (знак «+») и тормозном (знак «-») режимах, поэтому (1.16) в более общем виде запишется
 (1.17)
(1.17)
Выбор знаков в (1.17) зависит от режима работы двигателя и характера моментов сопротивления. Из анализа (1.16, 1.17) видно, что при J = const:
1) М>Мс,  =ε>0, имеет место разгон (ускорение) привода, электрическая энергия преобразуется в механическую;
=ε>0, имеет место разгон (ускорение) привода, электрическая энергия преобразуется в механическую;
2) если М<МС, <0, имеем замедление (торможение) привода;
3) при М = Мс,  = 0 привод работает в установившемся режиме.
= 0 привод работает в установившемся режиме.
Динамический момент проявляется только во время переходных процессов, когда изменяется скорость привода (аналогия: ЭДС самоиндукции e = L  будет только при изменении тока), он определяется алгебраической суммой моментов двигателя и сопротивления как по величине, так и по знаку.
будет только при изменении тока), он определяется алгебраической суммой моментов двигателя и сопротивления как по величине, так и по знаку.
Интегрированием уравнения (1.16) определяют время переходных процессов при заданных возмущающих воздействиях (изменение  , напряжения и др.).
, напряжения и др.).
Разделив переменные, получим
 (1.18)
(1.18)
Время изменения скорости от  до
до 
 (1.19)
(1.19)
 Для решения этого уравнения необходимо знать механические характеристики двигателя и механизма, т. е.
Для решения этого уравнения необходимо знать механические характеристики двигателя и механизма, т. е.  и
и  . При допущении, что
. При допущении, что  = const, Mc = const, J = const
= const, Mc = const, J = const
 (1.20)
(1.20)
По этому выражению можно определить время пуска двигателя, приняв  (рис. 1.6).
(рис. 1.6).
Для пуска на холостом ходу 
 (1.21)
(1.21)
При замедлении привода динамический момент имеет отрицательное значение, т. е. -М - Мс =  , или же двигатель развивает положительный момент, но по величине меньший момента сопротивления. В этом случае время торможения
, или же двигатель развивает положительный момент, но по величине меньший момента сопротивления. В этом случае время торможения
 (1.22)
(1.22)
В случае М = const, Mc = const получим (рис. 1.7)
 (1.23)
(1.23)
Из рис. 1.6, 1.7 видно, что при принятых допущениях зависимости  являются прямыми, наклон которых зависит от момента (М - Мс) или (М + Мс) и момента инерции.
являются прямыми, наклон которых зависит от момента (М - Мс) или (М + Мс) и момента инерции.
 Если и являются сложными функциями, то уравнение движения привода (1.17) аналитически не решается. В таких случаях пользуются приближенными графическими или графоаналитическими методами решения [2, 3, 4, 5].
Если и являются сложными функциями, то уравнение движения привода (1.17) аналитически не решается. В таких случаях пользуются приближенными графическими или графоаналитическими методами решения [2, 3, 4, 5].
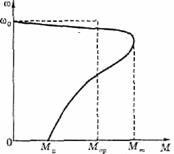
Пример. Оценить время разгона вхолостую асинхронного двигателя, имеющего характеристику  , показанную на рис. 1.8. При этом:
, показанную на рис. 1.8. При этом:  рад/с,
рад/с,  , максимальный момент
, максимальный момент  , момент инерции ротора
, момент инерции ротора  .
.
Рис. 1.7. График торможения электропривода
Точное определение времени пуска затруднено из-за нелинейной характеристики . Если момент за время пуска усреднить, т. е. реальную характеристику заменить прямоугольной, когда  , то получим из (1.20, 1.21):
, то получим из (1.20, 1.21):


Очевидно, что минимум времени разгона имеет место при наибольшем ускорении. Пусть Мс = const, а КПД механической передачи (редуктора) равен единице, тогда (1.16) может быть записано в виде
 , (1.24)
, (1.24)
где  – момент нагрузки исполнительного органа. Отсюда ускорение исполнительного органа
– момент нагрузки исполнительного органа. Отсюда ускорение исполнительного органа
 (1.25)
(1.25)
Максимум ускорения будет при  . В итоге получим оптимальное значение передаточного отношения
. В итоге получим оптимальное значение передаточного отношения
 (1.26)
(1.26)
Если  , то (1.29) запишется в виде
, то (1.29) запишется в виде
 (1.27)
(1.27)
Из (1.27) очевидно, что чем больше момент инерции производственного механизма Jио по сравнению с Jдв, тем выше должно быть передаточное число ip редуктора. Вопрос выбора передаточного числа редуктора особенно важен в приводах, работающих в повторно-кратковременных режимах S3.
Date: 2015-08-06; view: 910; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |