Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Запасом устойчивости по модулю называется величина
 ,
,
где А(wp) - значение АФЧХ при частоте w=wp, при которой она пересекает вещественную ось.
Для всех систем должны выполняться требования:
 ,
,  .
.
Так как АФЧХ графически строится в определенном масштабе, то для вычисления запаса устойчивости по модулю можно просто измерить длины отрезков, соответствующих единице и ОВ, и разделить результат первого измерения на второй. Если увеличивать коэффициент усиления системы, то точка В будет смещаться влево и при ОВ=-1 коэффициент усиления примет критическое значение. Поэтому запас устойчивости по модулю можно определить и по формуле
.
Оценка устойчивости и определение запасов устойчивости по ЛЧХ
АФЧХ разомкнутой системы подразделяются на два типа:
1) АФЧХ первого рода, все точки, пересечения которых с вещественной осью расположены справа от критической точки (кривая 1, рис. 12);
2) АФЧХ второго рода, точки, пересечения которых с вещественной осью расположены как справа, так и слева от критической точки (кривая 2, рис. 12).
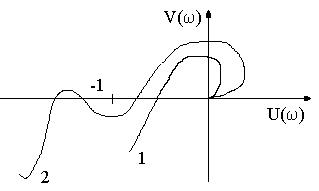
Рис. 12. Типы АФЧХ
В системах первого рода увеличение коэффициента усиления ведет к сдвигу ветви кривой влево и приближению ее к критической точке. Запасы устойчивости при этом уменьшаются и при k=kкр система попадает на границу устойчивости. Уменьшение коэффициента усиления стабилизирует систему. В системах 2-го рода переход системы на границу устойчивости может происходить как при увеличении коэффициента усиления, так и при его уменьшении. Из критерия Найквиста следует, что замкнутая система, имеющая в разомкнутом состоянии АФЧХ 1-го рода, устойчива, если всем точкам АФЧХ, вплоть до точки пересечения ее с окружностью единичного радиуса (w=wс), соответствуют значения фазы j(w), большие, чем -p, т.е. должно выполняться неравенство wс<wp. Этому определению легко дать интерпретацию на языке ЛЧХ.

 j(w) L(w)
j(w) L(w)
 |  | ||||
 | |||||

 -1800 wp ww
-1800 wp ww










 wc lgw
wc lgw

 H
H
g
Рис. 13. ЛЧХ системы 1-го рода
Для того чтобы система, устойчивая в разомкнутом состоянии и имеющая АФЧХ первого рода, была устойчивой и в замкнутом состоянии, необходимо и достаточно, чтобы при всех частотах, при которых ЛАХ положительна, значения фазовой характеристики были больше, чем -p, т.е. wс<wp.
По ЛЧХ легко определяются и запасы устойчивости, причем запас устойчивости по усилению в логарифмическом масштабе должен удовлетворять условию ç Н ê>6дБ, что соответствует значениям h>2, а по фазе .
Для того чтобы САУ, неустойчивая в разомкнутом состоянии и имеющая АФЧХ 2-го рода, была устойчивой в замкнутом состоянии, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов фазовой характеристикой через линию -p была равна р/2, где р- число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости, при всех частотах, когда L(w)>0.
 j(w) L(w)
j(w) L(w)

 |  | ||||||
 |  | ||||||







 - Å Å
- Å Å
 -1800 lgw
-1800 lgw
 |
Рис. 14. ЛЧХ системы 2-го рода
Необходимо подчеркнуть, что показанные способы оценки устойчивости по ЛЧХ и определения запасов устойчивости справедливы при таком расположении оси ординат относительно фазовой характеристики, когда с началом координат совмещена точка j(w)=-1800.
Если система автоматического управления не удовлетворяет заданным параметрам качества переходного процесса, то требуется произвести ее коррекцию с помощью корректирующего устройства. Методика получения которого показана ниже.
Определение корректирующего устройства
Построение желаемой ЛЧХ системы
Построение желаемой ЛЧХ включает в себя 2 этапа, это построение располагаемой ЛЧХ, и построение желаемой ЛЧХ.
Построение располагаемой ЛЧХ системы
Располагаемую ЛЧХ системы будем строить по передаточной функции разомкнутой системы.

где КОБЩ = 500 1/с – общий коэффициент передачи усилителя; t = 0,009 с – время чистого запаздывания; ТТ = 0,05 с – постоянная времени термопары; Т1 = 0,195 с, Т2 = 0,005 с – постоянные времени электродвигателя;
Сопрягающие частоты:
 рад/с
рад/с  дек
дек
 рад/с
рад/с  дек
дек
 рад/с
рад/с  дек
дек
График располагаемой ЛЧХ мы построили в п. 2.3., рассмотрим его еще раз (рис. 15)
Рис. 15. ЛЧХ системы 2-го рода
Построение желаемой ЛЧХ системы
а). Низкочастотный участок желаемой ЛЧХ (до w1) совпадает с низкочастотным участком располагаемой ЛЧХ.
б). Среднечастотный участок желаемой ЛАХ проводится из условия обеспечения требуемых запасов устойчивости для выполнения заданной величины перерегулирования – s и времени регулирования – tp.
s = 28 %
tp = 0.75 c
Среднечастотный участок желаемой ЛЧХ пересекает частотную ось на частоте среза wср и проходит под наклоном равным –20 дб/дек. Частота среза определяется согласно номограмме Солодовникова.


 рад/с Lg(wср) = 1.21 дек
рад/с Lg(wср) = 1.21 дек
Протяженность среднечастотного участка от частоты среза определяет запас устойчивости по амплитуде и находится по номограмме Бессекерского.
Для s = 28 % получаем Lh = 15 дб.
в). Среднечастотный участок желаемой ЛЧХ сопрягается с низкочастотным участком отрезком ЛЧХ, имеющим наклон -60 дб/дек.
г). Высокочастотный участок желаемой ЛЧХ проводится параллельно высокочастотному участку располагаемой ЛЧХ.
В итоге получаем желаемую ЛЧХ (рис. 16.)
 | |||||
| |||||
 | |||||
Рис. 16. График желаемой ЛЧХ
Определение передаточной функции разомкнутой желаемой системы.
Определим сопрягающие частоты.
wI = 0.5 рад/с
wII = 3.16 рад/с
wIII = 100 рад/с
Определим постоянные времени:
TI = 1/wI = 2 c
TII = 1/wII = 0.32 c
TIII = 1/wIII = 0.01 c
Получаем желаемую передаточную функцию разомкнутой системы:
 ,
,
где КОБЩ = 500 1/с – общий коэффициент передачи усилителя; t = 0,009 с – время чистого запаздывания.
Определение передаточной функции корректирующего устройства
Выберем последовательный тип корректирующего устройства. Тогда
WЖ(s) = WР(s)*WПКУ(s),
где WЖ(s) – желаемая передаточная функция; WР(s) – располагаемая передаточная функция; WПКУ(s) – передаточная функция корректирующего устройства.
Перейдем к ЛАХ
LЖ(s) = LР(s) + LПКУ(s)
LПКУ(s) = LЖ(s) – LР(s)
Для построения ЛАХ корректирующего устройства необходимо взять разность ЛАХ желаемой и располагаемой систем (рис. 17.).
|
|
|
|


|
|


Рис. 17. Графики располагаемой и желаемой ЛАХ
Производим вычитание:
а). Участок графика до частоты wI – пройдет с наклоном (-20) – (-20) = 0 дб/дек.
б). Участок графика от wI до wII – с наклоном (-60) – (-20) = -40 дб/дек.
в). Участок графика от wII до w1 – с наклоном (-20) – (-20) = 0 дб/дек.
г). Участок графика от w1 до wТ – с наклоном (-20) – (-40) = 20 дб/дек.
е). Участок графика от wТ до wIII – с наклоном (-20) – (-60) = 40 дб/дек.
ж). Участок графика от wIII до w2 – с наклоном (-80) – (-60) = -20 дб/дек.
з). Участок графика от w2 – с наклоном (-80) – (-80) = 0 дб/дек.
Получаем график переходного процесса (рис. 18.).
Рис. 18. График корректирующей ЛАХ с параметрами
wI = 0.5 рад/с TI = 2 c
wII = 3.16 рад/с TII = 0.32 c
w1 = 5.13 рад/с T1 = 0.195 c
wT = 20 рад/с TT = 0.05 c
wIII = 100 рад/с TIII = 0.01 c
w2 = 200 рад/с T2 = 0.005 c
t = 0,009 с
Определяем передаточную функцию корректирующего устройства:

Задание 2. Исследование качества переходных процессов САУ
Для САУ в соответствии с вариантом задания построить переходную и импульсную характеристику замкнутой системы и определить следующие параметры качества:
1) величину перерегулирования;
2) время переходного процесса;
3) статическую ошибку;
4) время регулирования;
5) коэффициент ошибки по положению;
6) коэффициент ошибки по скорости;
7) коэффициент ошибки по ускорению;
8) интегральные оценки качества.
Теоретические сведения
Графическое представление переходных и импульсных функций называют временными характеристиками. Временные характеристики представляют процессы, происходящие в динамическом и статическом режимах. Переходной функцией h(t) называют функцию, описывающую сигнал на выходе при условии, что на вход подано единичное ступенчатое воздействие при нулевых начальных условиях. График переходной функции, представляющий собой зависимость функции h(t) от времени t, называют переходной характеристикой. В том случае, если амплитуда единичного ступенчатого воздействия отлична от единицы, получают разновидность переходной характеристики, которая называется кривой разгона.
Импульсной дикцией или весовой функцией w(t) называют функцию, описывающую реакцию на единичное импульсное воздействие при нулевых начальных условиях. График зависимости функции w(t) от времени называют импульсной переходной (импульсной характеристикой).
Аналитическое определение переходных функций и характеристик основано на следующих положениях. Если задана передаточная функция системы или составной части W(p) и известен входной сигнал x(t), то выходной сигнал y(t) определяется следующим соотношением:
 .
.
Таким образом, изображение выходного сигнала  представляет собой произведение передаточной функции на изображение входного сигнала
представляет собой произведение передаточной функции на изображение входного сигнала  . Сигнал y(t) в явном виде получился после перехода от изображения к оригиналу y(t). Для большинства случаев линейных систем и составных элементов разработаны таблицы, позволяющие производить переход от изображений к оригиналу и обратно.
. Сигнал y(t) в явном виде получился после перехода от изображения к оригиналу y(t). Для большинства случаев линейных систем и составных элементов разработаны таблицы, позволяющие производить переход от изображений к оригиналу и обратно.
Так как изображение единичного ступенчатого воздействия равно  , то изображение переходной функции определяется соотношением:
, то изображение переходной функции определяется соотношением:
 .
.
Следовательно, для нахождения переходной функции необходимо передаточную функцию разделить на оператор Лапласа p и выполнять переход от изображения к оригиналу.
Изображение единичного импульса равно 1. Тогда изображение импульсной функции определяется выражением:
 .
.
Таким образом, передаточная функция является изображением импульсной функции.
|
 , то между импульсной и переходной функциями существует следующая зависимость:
, то между импульсной и переходной функциями существует следующая зависимость:
Методы построения переходной функции
Date: 2015-07-24; view: 660; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |