Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Шаговые двигатели. Общие сведения
В современных системах управления широко используются устройства, оперирующие с цифровой формой сигнала. Цифровая форма представления сигнала привела к созданию нового типа двигателей – шаговых двигателей (ШД). Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Современные ШД являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным, а частотным пуском ШД. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
Рассмотрим принцип действия простейшего однофазного двигателя. Двухполюсный ротор из магнитомягкой стали с клювообразными выступами помещен в четырехполюсный статор (рис.1.1). Одна пара полюсов выполнена из постоянных магнитов, на другой – находится обмотка управления. Пока тока в обмотках управления нет, ротор ориентируется вдоль постоянных магнитов и удерживается около них с определенным усилием, которое определяется магнитным потоком полюсов Ф пм . При подаче постоянного напряжения на обмотку возникает магнитный поток Ф у примерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, разливаемый постоянными магнитами, стремясь занять положение сносное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к. магнитное сопротивление между статором в этом направлении меньше, чем в обратном.

Рисунок 1.1 Схема простейшего однофазного ШД
Следующий управляющий импульс отключает напряжение с обмотки управления, и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов. Достоинством однофазных ШД с постоянными магнитами является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке управления не требуется потребление энергии, угол поворота сохраняет свое значение и при перерывах в питании. Двигатели этого типа отрабатывают импульс с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток.
Двигатели с переменным магнитным сопротивлением. Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1.2). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находится напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используется в индустриальных применениях.
Рисунок 1.2 Двигатель с переменным магнитным сопротивлением
Двигатели с постоянным магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 1.3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора.
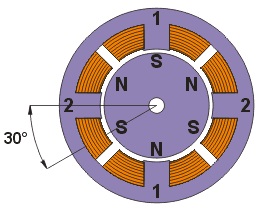
Рисунок 1.3 Двигатель с постоянными магнитами
Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигателя с постоянным магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Гибридные двигатели. Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис.1.4).
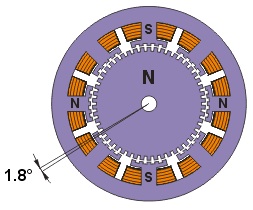
Рисунок 1.4 Поперечный разрез гибридного шагового двигателя
Ротор показанного на рисунке 1.4 двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град. Продельное сечение гибридного шагового двигателя показано на (рис. 1.5) Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть участвует в создании момента.
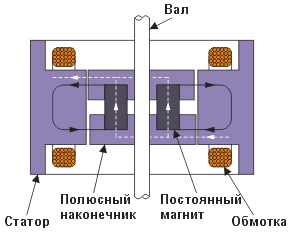
Рисунок 1.5 Поперечный разрез гибридного шагового двигателя
Как видно на (рис. 1.5), воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток. Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм.
Способы управления фазами шагового двигателя:
Полношаговый режим. Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис.1.6а). Этот способ называются “one phase on” full step или wave drive mode. Точка равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у не запитанного двигателя.
Второй способ – управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют “two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 1.6б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на полшага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 1.6в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса.
Основным принципом работы шагового двигателя является создание вращающегося магнитного поля, которое заставляет ротор поворачиваться. Вращающееся магнитное поля создается статором, обмотки которого соответствующим образом запитываются.
Рисунок 1.6 Способы управления фазами шагового двигателя
Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот, показана на рис. 1.7
Рисунок 1.7 Зависимость момента от угла поворота ротора для одной запитанной обмотки
Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности (рис. 1.8.)
Рис. 1.8 Зависимость момента от угла поворота ротора для двух запитанных обмоток.
Микрошаговый режим. Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 1.9), то результирующий момент будет равен:
Тн =(a2 + b2 ) 0,5
а точка равновесия ротора сместится в точку
x =2S/π*arctan b/a
где a и b – момент, создаваемый пе рвой и второй фазой соответственно,
Тн - результирующий момент удержания,
х – положение равновесия ротора в радианах,
S – угол шага в радианах.
Рисунок 1.9 Зависимость момента от угла поворота ротора в случае разных значений тока фаз
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима. На (рис. 1.10). показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Рисунок 1.10 Перемещения ротора в полношаговом и микрошаговом режимах
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.
Date: 2015-07-23; view: 1045; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |