Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Председатель ЦМК Заместитель директора
Методическое пособие
Выполнение курсового проекта по МДК 0103
«Теоретические основы контроля и анализа функционирования систем автоматического управления»
По специальности 220703 Автоматизация технологических процессов и производств (по отраслям)
одобренА ЦМК
Протокол №
от «___» ___________ 2013 г.
По специальности
220703 Автоматизация технологических процессов и производств (по отраслям)
Председатель ЦМК Заместитель директора
по учебной работе
Степанова О.Э. Т.Д. Тимошенко
Автор: Шемисова Л.В
Рецензенты: преподаватель ОМТТ
Степанова О.Э.
Требования к оформлению курсового проекта.
Курсовой проект, включает расчетно-пояснительную записку и графическую часть. Расчетно-пояснительная записка должна иметь объём не менее 25 листов стандартного формата А4. Оформление записки должно соответствовать требованиям действующего ГОСТа, предъявляемым к текстовым документам. На каждый лист наносится рамка согласно ГОСТу 2.105-68.
Содержание записки разделяют на разделы и подразделы соответственно заданию. Все формулы приводят сначала в буквенном выражении.
При ссылке на литературные источники в квадратных скобках указывают порядковый номер из списка использованной литературы. Например, [Л-5], с. 17. В списке использованной литературы должны быть указаны фамилии и инициалы авторов, название книги, наименование издательства, год.
Текст пояснительной записки может сопровождаться схемами и графиками.
Графики, схемы и эскизы могут быть выполнены на бумаге или миллиметровке карандашом. В тексте записки не должно быть помарок. Все решения должны производиться от первого лица множественного числа..
Графическая часть проекта выполняют на чертёжной бумаге стандартного формата в карандаше или на компьютере. Объём графической части 1 лист формата А1. чертежи должны быть выполнены с соблюдением требований действующих ГОСТов. ГОСТ 2.710-75. Обозначения условные буквенно-цифровые, применяемые на электрических схемах;
ГОСТ 2.702-75 Правила выполнения электрических схем;
2. Введение
АСУП – автоматизированная система управления, (АСУ) предприятием – выполняет все функции управления как отдельными структурными подразделениями (цехами, службами, отделами), так и предприятием в целом. Отметим, что словом «автоматизированная» подчеркивается тот факт, что АСУ включает в свой состав и человека.
Современные АСР обеспечивают такое регулирование, при котором последствия возмущений в значительной мере устраняются. АСР не является чисто самостоятельной системой, изолированной от возможных других систем. Часто она входит в состав системы более высокого уровня как ее элемент. В этом отношении связь между системами строится по иерархическому принципу.
В проекте необходимо дать обоснование для необходимости исследования объекта регулирования.
3. Характеристика объекта регулирования
В данном пункте необходимо дать полную характеристику объекта регулирования, его параметры и характеристики.
4.Построения характеристики разгона.
Кривая разгона строится на основании реальных исходных данных.
По экспериментальной кривой разгона строим таблицу №1.
Табл.№1
| № п/п | Врвремя | Регулируемые параметры |
| 12.3 | ||
| 13.4 | ||
| 14.4 | ||
| 15.2 | ||
| 16.7 | ||
| 17.2 | ||
| 18.4 | ||
| 19.6 | ||
| 20.5 | ||
| 21.6 | ||
| 21.9 | ||
| 22.2 | ||
| 22.5 | ||
| 22.7 | ||
| 22.8 |
Для того, чтобы определить параметры кривой разгона необходимо определить координаты переходной характеристики в относительных единицах, при этом используем значение запаздывания для каждой характеристики.
Величина регулируемого параметра определяется по следующим формулам:
Y=(Yтек-Ymin)/(Ymax-Ymin) – для возрастающей кривой.
Y=(Ymax-Yтек)/(Ymax-Ymin) – для убывающей кривой.
rY=Ymax-Ymin=22.8-12.3=10.5
где Уmax максимальное значение температуры
Уmin минимальное значение температуры
Утек текущее значение температуры
3. Определение безразмерной величины регулируемого параметра
Y0=(12.3-12.3)/10.5 =0
Y1=(13.4-12.3)/ 10.5=0.105
Y2=(14.4-12.3)/ 10.5=0.2
Y3=(15.2-12.3)/ 10.5=0.27
Y4=(16-12.3)/ 10.5=0.35
Y5=(16.7-12.3)/ 10.5=0.42
Y6=(17.2-12.3)/ 10.5=0.47
Y7=(18.4-12.3)/ 10.5=0.58
Y8=(19.6-12.3)/ 10.5=0.69
Y9=(20-12.3)/ 10.5=0.73
Y10=(20.5-12.3)/ 10.5=0.78
Y11=(21-12.3)/ 10.5=0.83
Y12=(21.6-12.3)/ 10.5=0.88
Y13=(21.9-12.3)/ 10.5=0.91
Y14=(22.2-12.3)/ 10.5=0.94
Y15=(22.5-12.3)/ 10.5=0.97
Y16=(22.7-12.3)/ 10.5=0.99
Y17=(22.8-12.3)/ 10.5=1
На основании этих данных строим таблицу №2.
Табл.№2
| № п/п | Время | Регулируемые параметры | Регулируемые параметры (относит.ед.) |
| 12.3 | |||
| 13.4 | 0.10 | ||
| 14.4 | 0.20 | ||
| 15.2 | 0.27 | ||
| 0.35 | |||
| 16.7 | 0.42 | ||
| 17.2 | 0.47 | ||
| 18.4 | 0.58 | ||
| 19.6 | 0.69 | ||
| 0.73 | |||
| 20.5 | 0.78 | ||
| 0.83 | |||
| 21.6 | 0.88 | ||
| 21.9 | 0.91 | ||
| 22.2 | 0.94 | ||
| 22.5 | 0.97 | ||
| 22.7 | 0.99 | ||
| 22.8 |
На основании таблицы № 2 строим кривую разгона в относительных единицах.
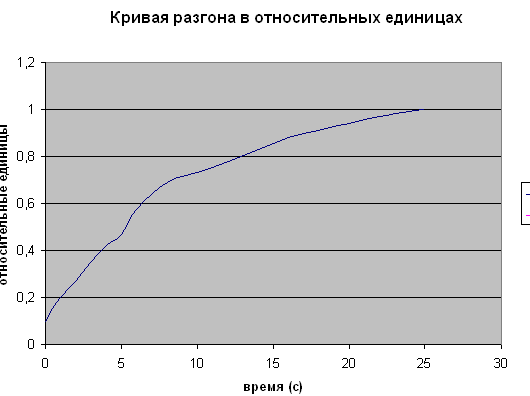
4. Построение переходной характеристики объекта регулирования в относительных единицах.
Определение показателей обработки кривой разгона
На основании характеристики разгона определяются основные параметры, при этом характеристика приводится к линейному виду.
Тобщ=Ттр+Тс+Тэ+Та – общее постоянная времени
Ттр=0, транспортное запаздывание
Тс=5с, системное запаздывание
Тэ=5с, эксплутационное запаздывание
Та=15с, переходное запаздывание
l=17%, возмущающее воздействие
K=rY/l0=10.5/17=0.6 -коэффициент усиления
Kотн.ед.=1/17=0.059 -коэффициент усиления в относительных единицах
E=tgX=Rоб/Та=1/15=0.07 
Степень самовыравнивания.
 =1/К=1/0.6=1.67
=1/К=1/0.6=1.67
 отн.ед.=1/0.059=16.95
отн.ед.=1/0.059=16.95
5. Построение амплитудно-фазовой характеристики объекта регулирования
Для построения характеристики необходимо знать амплитуду и фазу данной характеристики. Для этого необходимо рассчитать частоту и период колебаний в определённый момент времени для 6 точек характеристики. Результаты занести в таблицу №3.
| № точки | Период колебаний | Частота колебания | Амплитуда колебаний (Аw) | Фаза колебаний (градусы) |
| 0.126 | 0.024 | -156.5 | ||
| 41.7 | 0.151 | 0.026 | -157.03 | |
| 33.4 | 0.188 | 0.027 | -158.2 | |
| 24.9 | 0.252 | 0.027 | -160.94 | |
| 16.6 | 0.378 | 0.025 | -158.78 | |
| 8.3 | 0.757 | 0.015 | -160.92 |
Табл.№3
Период колебаний определяют как двойное произведение переходного процесса:
rt=51c
Tc=2*rt=2*51=102c
Для 6 точек время колебаний определяется следующим образом:
rt1=T1/6=102/6=17c – для одного колебания
w1=2*p/Т1=2*3.14/102=0.061
Для того, чтобы рассчитать амплитуду и фазу, необходимо произвести следующие действия:
1. Берём удвоенное произведение безразмерной величины и заполняем первую строку таблицы.
2. Во вторую строку таблицы необходимо занести данные при дополнительных нулевых значениях.
3. Разницу между 1-й и 2-й строкой заносят в 3-ю строку.
4. В 4-ю строку записывают натуральные значения измеряемой величины в относительных единицах
5. Определить значения X0, X1 и X2
По этим значениям определяем комплексные координаты для 2-х точек:
a=(2*X0-X1+X2)/3
b=(X1+X2)/  .
.
Амплитуда колебаний находится по формуле:
Aw1=( )/(1.27*l)
)/(1.27*l)
Фаза колебаний находится по формуле:
Yw1=-1800+arctg ((-a)/(-b))
Составим таблицу для данных точек.
| 1.18 | 1.78 | 1.98 | ||||||
| 1.18 | 1.78 | 1.98 | ||||||
| 1.18 | 1.78 | 1.98 | 0.82 | 1.22 | 1.02 | |||
| 0.59 | 0.89 | 0.99 | ||||||
| 0.59 | 0.89 | 0.99 | -0.18 | -0.78 | -0.98 | -1 | -1 | |
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | ||
| 1.18 |
Табл.№4
| rt=0 rt=8.3 rt=16.6 rt=24.9 rt=33.2 | h=0 h=0.59 h=0.89 h=0.99 h=1 |
a=(2*X0-X1+X2)/3=(2*0.89-0.99+(-0.18))/3=0.203
b=(X1+X2)/ =(0.99+(-0.18))/ =0.468
Aw1=()/(1.27*l)=( )/(1.27*17)=0.024
)/(1.27*17)=0.024
Yw1=-1800+arctg ((-a)/(-b))=-1800+23.450=-156.50
| 1.04 | 1.66 | 1.9 | ||||||
| 1.04 | 1.66 | 1.9 | ||||||
| 1.04 | 1.66 | 1.9 | 0.96 | 0.34 | 0.1 | |||
| 0.52 | 0.83 | 0.95 | ||||||
| 0.52 | 0.83 | 0.95 | -0.04 | -0.66 | -0.9 | -1 | -1 | |
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | ||
| 1.04 |
Табл.№5
| rt=0 rt=6.95 rt=13.9 rt=20.85 rt=27.8 | h=0 h=0.52 h=0.83 h=0.95 h=1 |
a=(2*X0-X1+X2)/3=(2*0.83-0.95+(-0.04))/3=0.223
b=(X1+X2)/ =(0.95+(-0.04))/ =0.0.526
Aw1=()/(1.27*l)=( )/(1.27*17)=0.026
)/(1.27*17)=0.026
Yw1=-1800+arctg ((-a)/(-b))=-1800+22.970=-157.030
| 0.92 | 1.48 | 1.78 | 1.98 | |||||
| 0.92 | 1.48 | 1.78 | 1.98 | |||||
| 0.92 | 1.48 | 1.78 | 1.06 | 0.52 | 0.22 | 0.02 | ||
| 0.46 | 0.74 | 0.89 | 0.99 | |||||
| 0.46 | 0.74 | 0.89 | 0.07 | -0.48 | -0.78 | -0.98 | -1 | |
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | ||
| 0.92 |
Табл.№6
| rt=0 rt=5.57 rt=11.14 rt=16.71 rt=22.28 rt=27.85 | h=0 h=0.46 h=0.74 h=0.89 h=0.99 h=1 |
a=(2*X0-X1+X2)/3=(2*0.74-0.89+0.07)/3=0.22
b=(X1+X2)/ =(0.89+0.07)/ =0.55
Aw1=()/(1.27*l)=( )/(1.27*17)=0.027
)/(1.27*17)=0.027
Yw1=-1800+arctg ((-a)/(-b))=-1800+21.80=-158.20
| 0.72 | 1.18 | 1.58 | 1.78 | 1.9 | 1.98 | |||
| 0.72 | 1.18 | 1.58 | ||||||
| 0.72 | 1.18 | 1.58 | 1.06 | 0.72 | 0.4 | 0.22 | 0.1 | |
| 0.36 | 0.59 | 0.79 | 0.89 | 0.95 | 0.99 | |||
| 0.36 | 0.59 | 0.79 | 0.17 | -0.23 | -0.59 | -0.78 | -0.9 | |
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | ||
| 0.72 |
Табл.№7
| rt=0 rt=4.15 rt=8.3 rt=12.45 rt=16.6 rt=20.75 rt=24.9 rt=29.05 | h=0 h=0.36 h=0.59 h=0.79 h=0.89 h=0.95 h=0.99 h=1 |
a=(2*X0-X1+X2)/3=(2*0.59-0.79+0.17)/3=0.19
b=(X1+X2)/ =(0.79+0.17)/ =0.55
Aw1=()/(1.27*l)=( )/(1.27*17)=0.027
)/(1.27*17)=0.027
Yw1=-1800+arctg ((-a)/(-b))=-1800+19.060=-160.94
| 0.48 | 0.92 | 1.2 | 1.48 | 1.66 | 1.78 | 1.86 | |
| 0.48 | 0.92 | 1.2 | 1.48 | ||||
| 0.48 | 0.92 | 1.2 | 0.74 | 0.58 | 0.38 | ||
| 0.24 | 0.46 | 0.6 | 0.74 | 0.83 | 0.89 | 0.93 | |
| 0.24 | 0.46 | 0.6 | 0.26 | -0.09 | -0.31 | -0.55 | |
| X0 | X1 | X2 | X3 | X4 | X5 | ||
| 0.48 |
Табл.№8
| rt=0 rt=2.77 rt=5.54 rt=8.31 rt=11.08 rt=13.85 rt=16.62 rt=19.39 rt=22.16 rt=24.93 rt=27.7 | h=0 h=0.24 h=0.46 h=0.6 h=0.74 h=0.83 h=0.89 h=0.93 h=0.97 h=0.99 h=1 |
a=(2*X0-X1+X2)/3=(2*0.46-0.6+0.26)/3=0.193
b=(X1+X2)/ =(0.6+0.26)/ =0.497
Aw1=()/(1.27*l)=( )/(1.27*17)=0.025
)/(1.27*17)=0.025
Yw1=-1800+arctg ((-a)/(-b))=-1800+21.220=-158.780
| 0.26 | 0.5 | 0.72 | 0.9 | 1.06 | 1.2 | 1.36 | 1.48 | |
| 0.26 | 0.5 | 0.72 | 0.9 | 1.06 | ||||
| 0.26 | 0.5 | 0.72 | 0.64 | 0.56 | 0.48 | 0.46 | 0.42 | |
| 0.13 | 0.25 | 0.36 | 0.45 | 0.53 | 0.6 | 0.68 | 0.74 | |
| 0.13 | 0.25 | 0.36 | 0.19 | 0.03 | -0.12 | -0.22 | -0.32 | |
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | ||
| 0.26 |
Табл.№9
| rt=0 rt=1.38 rt=2.76 rt=4.14 rt=5.52 rt=6.9 rt=8.28 rt=9.66 rt=11.04 rt=12.42 rt=13.8 rt=15.8 rt=16.56 rt=17.94 rt=19.32 rt=20.7 rt=22.8 rt=23.46 rt=24.84 rt=26.22 | h=0 h=0.13 h=0.25 h=0.36 h=0.45 h=0.53 h=0.6 h=0.68 h=0.74 h=0.79 h=0.82 h=0.87 h=0.89 h=0.91 h=0.93 h=0.96 h=0.98 h=0.99 h=0.99 h=1 |
a=(2*X0-X1+X2)/3=(2*0.25-0.36+0.19)/3=0.11
b=(X1+X2)/ =(0.36+0.19)/ =0.318
Aw1=()/(1.27*l)=( )/(1.27*17)=0.015
)/(1.27*17)=0.015
Yw1=-1800+arctg ((-a)/(-b))=-1800+19.080=-160.920
На основании полученных данных строится годограф и определяется надёжность объекта регулирования, если система не устойчива, то вводится корректирующее звено.
6. Выбор регулятора
Для того, чтобы осуществить выбор регулятора необходимо знать показатели качества регулирования:
1. Перерегулирование
2. Статическая и динамическая ошибка
3. Время регулирования
4. Максимальное возмущение (если этот параметр задан)
Эти параметры определяются следующим образом:
1. Время перерегулирования определяется по формуле:
Y=(Ymax-Y0)/Y0=(22.8-12.3)/12.3=0.854
где Ymax – максимальная величина регулируемого параметра;
Y0 – определяется, как максимальное отклонение регулируемой величины при нанесении возмущающего воздействия.
2. Время регулирования определяется по графику №1 (литература 5).
3. Статическая ошибка определяется по формуле:
e=1/(1+Kp)=1/(1+0.6)=0.625
где Kp – коэффициент усиления в относительных единицах измерения.
4. Максимальное отклонение регулируемой величины можно определить по формуле:
Y=l* Kp=17*0.6=10.2
где l - возмущающее регулирующее воздействие,
Kp – коэффициент усиления в относительных единицах измерения.
Из графиков (литература 5) определяем динамический коэффициент передачи Rд для разного типа регуляторов для соотношения t/Т0, где t - время запаздывания, Т – постоянная времени, а t складывается из переходного и транспортного запаздывания.
Если:
t=120, запаздывание
T=600 постоянное времени
t/T=120/600=0.2
П - Rд=0.55 tp/t=50
И - Rд=0.15 tp/t=7
ПИ - Rд=0.09 tp/t=12
ПИД - Rд=0.1 tp/t=8
tр – время регулирования
Date: 2015-06-11; view: 318; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |